代碼的前半段基礎是用的別人的,后面一半的改進是自己寫的
%% 初始化
map=im2bw(imread('map2.bmp')); % bmp無損壓縮影像500x500,im2bw把灰度圖轉換成二值影像01
source=[10 10]; % 起始點位置
goal=[490 490]; % 目標點位置
stepsize=20; % RRT每步步長
disTh=20; % 直到qnearest和目標點qgaol距離小于一個閾值
maxFailedAttempts = 10000; % 最大嘗試次數
display=true; % RRT是否展示
%% %%%% 引數 %%%%%
tic; % 保存當前時間
if ~feasiblePoint(source,map), error('source lies on an obstacle or outside map'); end
if ~feasiblePoint(goal,map), error('goal lies on an obstacle or outside map'); end
if display, imshow(map);rectangle('position',[1 1 size(map)-1],'edgecolor','k'); end %展示影像,并創建帶有尖角的矩形邊框
RRTree=double([source -1]); % RRT 從起點開始(索引為-1),經過的結點和索引
failedAttempts=0; % 已經嘗試失敗的次數
counter=0; % 回圈計數
pathFound=false; % 是否找到路徑的flag
while failedAttempts<=maxFailedAttempts % RRT回圈
if rand < 0.5
sample=rand(1,2) .* size(map); % 50%幾率隨機采點
else
sample=goal; % 50%幾率向目標前進
end
% 每一個分支都會繼續分支
[A, I]=min( distanceCost(RRTree(:,1:2),sample) ,[],1); % 發現結點和隨機采樣點最小距離的一行,并回傳對應索引,[],1可以去掉
closestNode = RRTree(I,1:2); %樹結點最近點坐標,最近點可能多個(1)不可取
theta=atan2(sample(1)-closestNode(1),sample(2)-closestNode(2)); % 產生新結點的方向
newPoint = double(int32(closestNode(1:2) + stepsize * [sin(theta) cos(theta)])); % 產生新結點,先計算縱坐標,再計算橫坐標
if ~checkPath(closestNode(1:2), newPoint, map) % 檢測最近結點到新結點的路徑是否可行
failedAttempts=failedAttempts+1;
continue;
end
if distanceCost(newPoint,goal)<disTh, pathFound=true;break; end % 檢測新結點是否到達目標點,即小于一定的閾值
[A, I2]=min( distanceCost(RRTree(:,1:2),newPoint) ,[],1); % 檢測檢點是否已經存在樹結點中
if distanceCost(newPoint,RRTree(I2(1),1:2))<disTh, failedAttempts=failedAttempts+1;continue; end %如果新結點在樹結點中,記失敗一次
RRTree=[RRTree;newPoint I]; % 將新結點介入到如結點中
failedAttempts=0;
% 每擴展一個新結點,畫一條線
if display,
line([closestNode(2);newPoint(2)],[closestNode(1);newPoint(1)]);
counter=counter+1;M(counter)=getframe;
end
end
% 補充最后一個新結點和終點的連線
if display && pathFound
line([closestNode(2);goal(2)],[closestNode(1);goal(1)]);
counter=counter+1;M(counter)=getframe;
end
if display
disp('click/press any key');
waitforbuttonpress;
end
if ~pathFound, error('no path found. maximum attempts reached'); end
%% 優化最終軌跡
path0=[goal];
prev0=I;
while prev0>0
path0=[RRTree(prev0,1:2);path0];
prev0=RRTree(prev0,3);
end %最初軌跡path0
path=[goal];
prev=I;
path=[RRTree(prev,1:2);path];
prev1=RRTree(prev,3);
prev=RRTree(prev1,3);
j=2;
while prev>2
path1=path;
path=[RRTree(prev,1:2);path];
if ~checkPath(path(j,1:2),path(j+1,1:2), map) % 檢測新路徑是否可行
path=path1;
path=[RRTree(prev1,1:2);path];
path=[RRTree(prev,1:2);path];
else
path=path;
end
prev=RRTree(prev,3);
prev=RRTree(prev,3);
prev1=RRTree(prev1,3);
prev1=RRTree(prev1,3);
j=j+1;
end
path=[RRTree(3,1:2);path];
path=[RRTree(2,1:2);path];
path=[source;path];
%嘗試每兩個節點合一之后軌跡path
path2=[j+3 2];
path2(1,1:2)=path(1,1:2);
m=1;
n=1;
while m<j+2
if ~checkPath(path(m,1:2),path(m+2,1:2), map)
path2(n+1,1:2)=path(m+1,1:2);
m=m+1;
else
path2(n+1,1:2)=path(m+2,1:2);
m=m+2;
end
n=n+1;
end
%在path基礎上再次兩兩合一之后path2
path3=[n+3 2];
path3(1,1:2)=path2(1,1:2);
o=1;
p=1;
while o<n-1
if ~checkPath(path2(o,1:2),path2(o+2,1:2), map)
path3(p+1,1:2)=path2(o+1,1:2);
o=o+1;
else
path3(p+1,1:2)=path2(o+2,1:2);
o=o+2;
end
p=p+1;
end
path3(p+1,1:2)=goal;
%在path2基礎上兩兩合一,path3
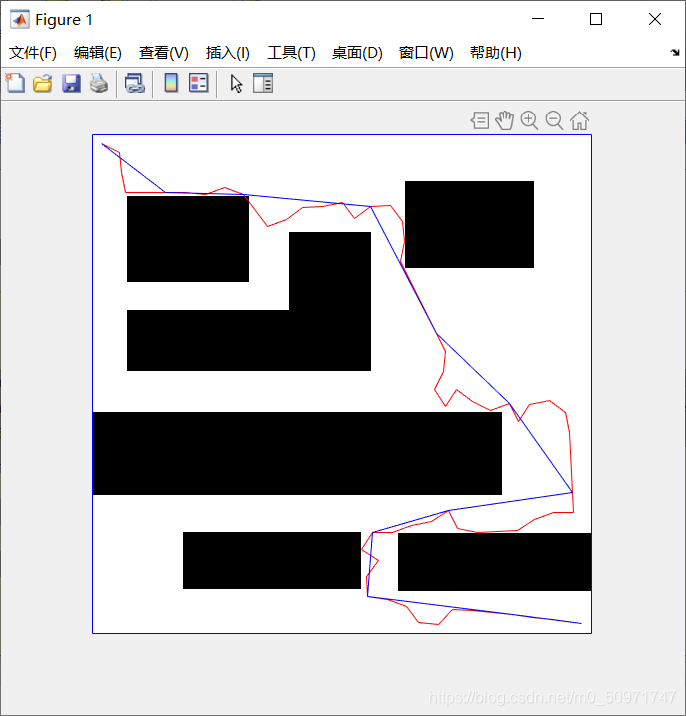
%% 顯示時間和路徑長度
pathLength=0;
pathLength1=0;
for i=1:length(path0)-1, pathLength = pathLength + distanceCost(path0(i,1:2),path0(i+1,1:2)); end % calculate path length
for k=1:length(path3)-1, pathLength1 = pathLength1 + distanceCost(path3(k,1:2),path3(k+1,1:2)); end % calculate path3 length
fprintf('processing time=%d \nPath0 Length=%d \n\n Path3 Length=%d \n\n', toc,pathLength,pathLength1); % 列印運行時間toc和改進前后路徑長度
imshow(map);rectangle('position',[1 1 size(map)-1],'edgecolor','b');
line(path0(:,2),path0(:,1),'Color','r'); %紅線表示改進前
hold on
line(path3(:,2),path3(:,1), 'Color','b'); %藍線表示改進后
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/283159.html
標籤:AI
上一篇:是什么原因讓華為測驗工程師都說puppeteer比selenium好呢?
下一篇:有關C語言記憶體管理的一些總結