Author:AXYZdong 自動化專業 工科男
有一點思考,有一點想法,有一點理性!
定個小小目標,努力成為習慣!在最美的年華遇見更好的自己!
CSDN@AXYZdong,CSDN首發,AXYZdong原創
唯一博客更新的地址為: 👉 AXYZdong的博客 👈
B站主頁為:AXYZdong的個人主頁
文章目錄
- 2.1 線性定常系統齊次狀態方程的解
- 2.2 狀態轉移矩陣
- 2.2.1 狀態轉移矩陣的含義
- 2.2.2 狀態轉移矩陣的基本性質
- 2.2.3 幾個特殊的矩陣指數函式
- 2.2.4 ? ( t ) \phi(t) ?(t) 或 e A t e^{At} eAt 的計算
- 2.3 線性定常系統非齊次狀態方程的解
- 2.3.1 線性系統的運動規律
- 2.3.2 特定輸入下的狀態回應
- 2.4 線性時變系統的運動分析
- 2.4.1 齊次狀態方程的解
- 2.4.2 狀態轉移矩陣的計算
- 2.4.3 線性時變非齊次狀態方程的解
- 2.4.4 系統輸出
- 2.5 線性定常系統的離散化
- 參考文獻
2.1 線性定常系統齊次狀態方程的解
- 線性定常系統的運動
- 自由運動:線性定常系統在沒有控制的作用,即
u
=
0
u=0
u=0 時,由初始狀態引起的運動稱自由運動,
齊次狀態方程的解: x ˊ = A x , x ( t ) ∣ t = 0 = x ( 0 ) \acute{x}=Ax,x(t)|_{t=0}=x(0) xˊ=Ax,x(t)∣t=0?=x(0) - 強迫運動:線性定常系統在控制
u
u
u 作用下的運動,稱為強迫運動,
非齊次狀態方程的解: x ˊ = A x + B u , x ( t ) ∣ t = 0 = x ( t 0 ) \acute{x}=Ax+Bu,x(t)|_{t=0}=x(t_0) xˊ=Ax+Bu,x(t)∣t=0?=x(t0?)
- 齊次狀態方程:
x
ˊ
=
A
x
\acute{x}=Ax
xˊ=Ax
滿足初始狀態 x ( t ) ∣ t = 0 = x ( t 0 ) x(t)|_{t=0}=x(t_0) x(t)∣t=0?=x(t0?) 的解是:
x ( t ) = e A ( t ? t 0 ) x ( t 0 ) , t ≥ t 0 x(t)=e^{A(t-t_0)}x(t_0),t\geq t_0 x(t)=eA(t?t0?)x(t0?),t≥t0?
滿足初始狀態 x ( t ) ∣ t = 0 = x ( 0 ) x(t)|_{t=0}=x(0) x(t)∣t=0?=x(0) 的解是:
x ( t ) = e A t x ( 0 ) , t ≥ 0 x(t)=e^{At}x(0),t\geq 0 x(t)=eAtx(0),t≥0
2.2 狀態轉移矩陣
2.2.1 狀態轉移矩陣的含義
已知線性定常系統的齊次狀態方程: x ˊ = A x \acute{x}=Ax xˊ=Ax
滿足初始狀態
x
(
t
)
∣
t
=
0
=
x
(
0
)
x(t)|_{t=0}=x(0)
x(t)∣t=0?=x(0) 的解是:
x
(
t
)
=
e
A
t
x
(
0
)
,
t
≥
0
x(t)=e^{At}x(0),t\geq 0
x(t)=eAtx(0),t≥0
滿足初始狀態
x
(
t
)
∣
t
=
0
=
x
(
t
0
)
x(t)|_{t=0}=x(t_0)
x(t)∣t=0?=x(t0?) 的解是:
x
(
t
)
=
e
A
(
t
?
t
0
)
x
(
t
0
)
,
t
≥
t
0
x(t)=e^{A(t-t_0)}x(t_0),t\geq t_0
x(t)=eA(t?t0?)x(t0?),t≥t0?
令
:
{
e
A
t
=
?
(
t
)
e
A
(
t
?
t
0
)
=
?
(
t
?
t
0
)
,
則
有
:
{
x
(
t
)
=
?
(
t
)
x
(
0
)
x
(
t
)
=
?
(
t
?
t
0
)
x
(
t
0
)
令: \begin{cases} e^{At}=\phi (t) \\[2ex] e^{A(t-t_0)}=\phi (t-t_0) \end{cases},則有: \begin{cases} x(t)=\phi (t)x(0) \\[2ex] x(t)=\phi (t-t_0)x(t_0) \end{cases}
令:????eAt=?(t)eA(t?t0?)=?(t?t0?)?,則有:????x(t)=?(t)x(0)x(t)=?(t?t0?)x(t0?)?
說明:
1、狀態轉移矩陣必須滿足以下兩個條件
- 狀態轉移矩陣初始條件: ? ( t ? t 0 ) = I \phi (t-t_0)=I ?(t?t0?)=I
- 狀態方程本身: ? ( t ? t 0 ) = A ? ( t ? t 0 ) \phi (t-t_0)=A\phi (t-t_0) ?(t?t0?)=A?(t?t0?)
2、對于線性定常系統來說,狀態轉移矩陣就是矩陣指數函式本身
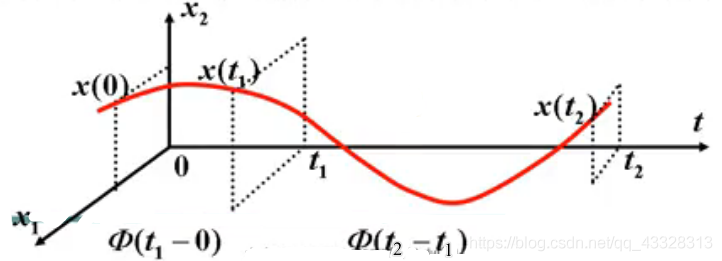
3、狀態轉移矩陣的物理意義:從時間角度看,狀態轉移矩陣使狀態向量隨著時間的推移不斷地作坐標變換,不斷地在狀態空間中作轉移,故稱為狀態轉移矩陣,
2.2.2 狀態轉移矩陣的基本性質
- 不發生時間推移下的不變性
e A ( t ? t 0 ) = e A 0 = I e^{A(t-t_0)}=e^{A0}=I eA(t?t0?)=eA0=I - 傳遞性(組合性)
? ( t 2 ? t 0 ) = ? ( t 2 ? t 1 ) ? ( t 1 ? t 0 ) \phi (t_2-t_0)=\phi (t_2-t_1)\phi (t_1-t_0) ?(t2??t0?)=?(t2??t1?)?(t1??t0?) - 可逆性
e A t e^{At} eAt 總是非奇異的,必有逆存在,且: ( e A t ) ? 1 = e ? A t (e^{At})^{-1}=e^{-At} (eAt)?1=e?At - 分解性
設 A A A 為 n × n n\times n n×n 階矩陣 , t 1 t_1 t1? 、 t 2 t_2 t2? 為兩個獨立自變數,則有:
e A ( t 1 + t 2 ) = e A t 1 e A t 2 e^{A(t_1+t_2)}=e^{At_1}e^{At_2} eA(t1?+t2?)=eAt1?eAt2? - 倍時性
[ ? ( t ) ] k = ? ( k t ) [\phi(t)]^k=\phi (kt) [?(t)]k=?(kt) - 微分性和交換性:
對 e A t 有 : d d t ( e A t ) = A e A t = e A t A 對e^{At}有:\frac{d}{dt}(e^{At})=Ae^{At}=e^{At}A 對eAt有:dtd?(eAt)=AeAt=eAtA
2.2.3 幾個特殊的矩陣指數函式
- 若
A
A
A 為對角線矩陣,即
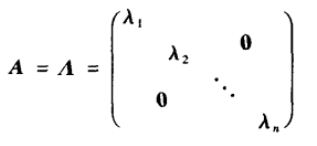
則: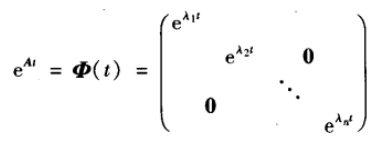
- 若
A
A
A 能夠通過非奇異變換予以對角線化,即
T ? 1 A T = A T^{-1}AT=A T?1AT=A
則: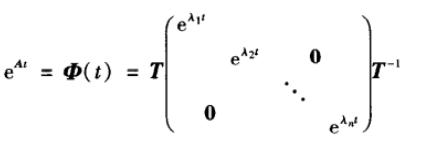
- 若
A
A
A 為約旦陣
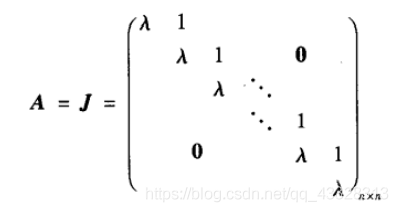
則: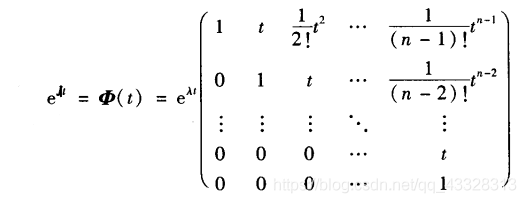
2.2.4 ? ( t ) \phi(t) ?(t) 或 e A t e^{At} eAt 的計算
- 根據 ? ( t ) \phi(t) ?(t) 或 e A t e^{At} eAt 的定義直接計算
- 變為 A A A 約旦標準型
- 利用拉氏反變換法求 e A t e^{At} eAt
- 應用凱萊–哈密頓定理求 e A t e^{At} eAt
2.3 線性定常系統非齊次狀態方程的解
2.3.1 線性系統的運動規律
若線性定常系統的非齊次狀態方程
x
ˊ
=
A
x
+
B
u
,
\acute{x}=Ax+Bu,
xˊ=Ax+Bu, 初始狀態為
x
(
t
0
)
x(t_0)
x(t0?) 的解存在,則解形式如下:
x
(
t
)
=
e
A
(
t
?
t
0
)
x
(
t
0
)
+
∫
t
0
t
e
A
(
t
?
τ
)
B
u
(
τ
)
d
τ
或
:
x
(
t
)
=
?
(
t
?
t
0
)
x
(
t
0
)
+
∫
t
0
t
?
(
t
?
τ
)
B
u
(
τ
)
d
τ
(1)
x(t)=e^{A(t-t_0)}x(t_0)+\int_{t_0}^{t}e^{A(t-\tau)}Bu(\tau)d\tau \tag 1 \\[2ex] 或: x(t)=\phi (t-t_0)x(t_0)+\int_{t_0}^{t}\phi (t-\tau)Bu(\tau)d\tau
x(t)=eA(t?t0?)x(t0?)+∫t0?t?eA(t?τ)Bu(τ)dτ或:x(t)=?(t?t0?)x(t0?)+∫t0?t??(t?τ)Bu(τ)dτ(1)
-
? ( t ? t 0 ) x ( t 0 ) \phi (t-t_0)x(t_0) ?(t?t0?)x(t0?) :初始狀態引起的回應,零輸入回應——自由運動
-
∫ t 0 t ? ( t ? τ ) B u ( τ ) d τ \int_{t_0}^{t}\phi (t-\tau)Bu(\tau)d\tau ∫t0?t??(t?τ)Bu(τ)dτ:輸入引起的回應,零狀態回應——強迫運動
當 t 0 = 0 t_0=0 t0?=0 時, x ( t ) = ? ( t ) x ( 0 ) + ∫ 0 t ? ( t ? τ ) B u ( τ ) d τ x(t)=\phi (t)x(0)+\int_{0}^{t}\phi (t-\tau)Bu(\tau)d\tau\\[2ex] x(t)=?(t)x(0)+∫0t??(t?τ)Bu(τ)dτ
如果系統的輸出方程為:
y
(
t
)
=
C
x
(
t
)
+
D
u
(
t
)
y(t)=Cx(t)+Du(t)
y(t)=Cx(t)+Du(t)
將式(1)代入上式得:
y
(
t
)
=
C
e
A
(
t
?
t
0
)
x
(
t
0
)
+
C
∫
t
0
t
e
A
(
t
?
τ
)
B
u
(
τ
)
d
τ
+
D
u
(
t
)
y(t)=Ce^{A(t-t_0)}x(t_0)+C\int_{t_0}^{t}e^{A(t-\tau)}Bu(\tau)d\tau+Du(t)
y(t)=CeA(t?t0?)x(t0?)+C∫t0?t?eA(t?τ)Bu(τ)dτ+Du(t)
說明:與線性定常系統齊次狀態方程的解不同,齊次狀態方程的解僅由初始狀態引起的回應組成,
例:設系統狀態方程為:
令 : { x 1 ˊ = x 2 x 2 ˊ = ? x 1 ? 2 x 2 + u 令: \begin{cases} \acute{x_1}=x_2 \\[2ex] \acute{x_2}=-x_1-2x_2+u \end{cases} 令:????x1?ˊ?=x2?x2?ˊ?=?x1??2x2?+u?
試求當 u ( t ) = sin ? t + cos ? t u(t)=\sin t+\cos t u(t)=sint+cost 時非齊次方程的解,且已知
( x 1 ( 0 ) x 2 ( 0 ) ) = ( 1 0 ) \begin{pmatrix} x_1(0 )\\[2ex] x_2(0)\\ \end{pmatrix} = \begin{pmatrix} 1\\[2ex] 0\\ \end{pmatrix} (x1?(0)x2?(0)?)=(10?)
輸出方程為: y = x 1 y=x_1 y=x1?
解:
A
=
(
0
1
?
1
?
2
)
,
B
=
(
0
1
)
,
C
=
(
1
0
)
A= \begin{pmatrix} 0 &1\\[2ex] -1 & -2\\ \end{pmatrix}, B = \begin{pmatrix} 0\\[2ex] 1\\ \end{pmatrix}, C= \begin{pmatrix} 1 &0\\ \end{pmatrix}
A=(0?1?1?2?),B=(01?),C=(1?0?)
- 求
?
(
t
)
\phi (t)
?(t)
? ( t ) = ( ( 1 + t ) e ? t t e ? t ? t e ? t ( 1 ? t ) e ? t ) \phi(t)= \begin{pmatrix} (1+t)e^{-t} & te^{-t}\\[2ex] -te^{-t} & (1-t)e^{-t}\\ \end{pmatrix} ?(t)=((1+t)e?t?te?t?te?t(1?t)e?t?) - y = C X = C ? ( t ) x ( 0 ) + C ∫ 0 t ? ( t ? τ ) B u ( τ ) d τ = ( 1 + t ) e ? t + ∫ 0 t ( t ? τ ) e ? ( t ? τ ) ( sin ? t + cos ? t ) d τ ?? ? ?? y ( t ) = 3 2 e ? t + t e ? t + 1 2 sin ? t ? 1 2 cos ? t y=CX\\[2ex] =C\phi(t)x(0)+C\int^{t}_{0}\phi (t-\tau)Bu(\tau)d\tau\\[2ex] =(1+t)e^{-t}+\int^{t}_{0}(t-\tau)e^{-(t-\tau)}(\sin t+\cos t)d\tau\\[2ex] \implies y(t)=\frac{3}{2}e^{-t}+te^{-t}+\frac{1}{2}\sin t-\frac{1}{2}\cos t y=CX=C?(t)x(0)+C∫0t??(t?τ)Bu(τ)dτ=(1+t)e?t+∫0t?(t?τ)e?(t?τ)(sint+cost)dτ?y(t)=23?e?t+te?t+21?sint?21?cost
2.3.2 特定輸入下的狀態回應
- 脈沖回應
當 u ( t ) = K δ ( t ) , x ( 0 ) = x 0 時 , x ( t ) = e A t x 0 + e A t B K 當u(t)=K\delta(t),x(0)=x_0時,\\[2ex] x(t)=e^{At}x_0+e^{At}BK 當u(t)=Kδ(t),x(0)=x0?時,x(t)=eAtx0?+eAtBK - 階躍回應
當 u ( t ) = K ? 1 ( t ) , x ( 0 ) = x 0 時 , x ( t ) = e A t x 0 + A ? 1 ( e A t ? I ) B K 當u(t)=K\cdot 1(t),x(0)=x_0時,\\[2ex] x(t)=e^{At}x_0+A^{-1}(e^{At}-I)BK 當u(t)=K?1(t),x(0)=x0?時,x(t)=eAtx0?+A?1(eAt?I)BK - 斜坡回應
當 u ( t ) = K t ? 1 ( t ) , x ( 0 ) = x 0 時 , x ( t ) = e A t x 0 + [ A ? 2 ( e A t ? I ) ? A ? 1 t ] B K 當u(t)=Kt\cdot 1(t),x(0)=x_0時,\\[2ex] x(t)=e^{At}x_0+[A^{-2}(e^{At}-I)-A^{-1}t]BK 當u(t)=Kt?1(t),x(0)=x0?時,x(t)=eAtx0?+[A?2(eAt?I)?A?1t]BK
2.4 線性時變系統的運動分析
線性時變系統方程為:
{
x
ˊ
(
t
)
=
A
(
t
)
x
(
t
)
+
B
(
t
)
u
(
t
)
y
(
t
)
=
C
(
t
)
x
(
t
)
+
D
(
t
)
u
(
t
)
(2)
\begin{cases} \acute{x}(t)=A(t)x(t)+B(t)u(t)\\[2ex] y(t)=C(t)x(t)+D(t)u(t)\tag 2 \end{cases}
????xˊ(t)=A(t)x(t)+B(t)u(t)y(t)=C(t)x(t)+D(t)u(t)?(2)
如果
A
(
t
)
、
B
(
t
)
、
C
(
t
)
A(t)、B(t)、C(t)
A(t)、B(t)、C(t) 的所有元素在時間區間上
[
t
0
,
∞
]
[t_0,\infty]
[t0?,∞] 均是連續函式,則對于任意的初始狀態
x
(
t
0
)
x(t_0)
x(t0?) 和輸入向量
u
(
t
)
u(t)
u(t) ,系統狀態方程的解存在并且唯一,
2.4.1 齊次狀態方程的解
x ˊ ( t ) = A ( t ) x ( t ) 初 始 狀 態 為 x ( t 0 ) , 其 解 為 : x ( t ) = ? ( t , t 0 ) x ( t 0 ) \acute{x}(t)=A(t)x(t)\\[2ex] 初始狀態為x(t_0),其解為:x(t)=\phi(t,t_0)x(t_0) xˊ(t)=A(t)x(t)初始狀態為x(t0?),其解為:x(t)=?(t,t0?)x(t0?)
2.4.2 狀態轉移矩陣的計算
線性時變系統的狀態轉移矩陣
?
(
t
,
t
0
)
\phi(t,t_0)
?(t,t0?) 既是時間
t
t
t 的函式,又是初始時刻
t
0
t_0
t0? 的函式, 一般用級數近似法計算,
?
(
t
,
t
0
)
=
I
+
∫
t
0
t
A
(
τ
0
)
d
τ
0
+
∫
t
0
t
A
(
τ
0
)
∫
t
0
τ
0
A
(
τ
1
)
d
τ
1
d
τ
0
+
∫
t
0
t
A
(
τ
0
)
∫
t
0
τ
0
A
(
τ
1
)
∫
t
0
τ
1
A
(
τ
2
)
d
τ
2
d
τ
1
d
τ
0
+
.
.
.
\phi(t,t_0)=I+\int_{t_0}^{t}A(\tau_0)d\tau_0+\int^{t}_{t_0}A(\tau_0)\int_{t_0}^{\tau_0}A(\tau_1)d\tau_1d\tau_0+\int^{t}_{t_0}A(\tau_0)\int_{t_0}^{\tau_0}A(\tau_1)\int_{t_0}^{\tau_1}A(\tau_2)d\tau_2d\tau_1d\tau_0+...
?(t,t0?)=I+∫t0?t?A(τ0?)dτ0?+∫t0?t?A(τ0?)∫t0?τ0??A(τ1?)dτ1?dτ0?+∫t0?t?A(τ0?)∫t0?τ0??A(τ1?)∫t0?τ1??A(τ2?)dτ2?dτ1?dτ0?+...
2.4.3 線性時變非齊次狀態方程的解
將(2)中的狀態方程重寫為:
{
x
ˊ
(
t
)
=
A
(
t
)
x
+
B
(
t
)
u
x
(
t
)
∣
t
=
t
0
=
x
(
t
0
)
\begin{cases} \acute{x}(t)=A(t)x+B(t)u\\[2ex] x(t)|_{t=t_0}=x(t_0) \end{cases}
????xˊ(t)=A(t)x+B(t)ux(t)∣t=t0??=x(t0?)?
其解為:
x
(
t
)
=
?
(
t
,
t
0
)
x
(
t
0
)
+
∫
t
0
t
?
(
t
,
τ
)
B
(
τ
)
u
(
τ
)
d
τ
x
(
t
)
=
?
(
t
,
t
0
)
[
x
(
t
0
)
+
∫
t
0
t
?
(
t
0
,
τ
)
B
(
τ
)
u
(
τ
)
d
τ
]
x(t)=\phi (t,t_0)x(t_0)+\int_{t_0}^{t}\phi (t,\tau)B(\tau)u(\tau)d\tau\\[2ex] x(t)=\phi (t,t_0)[x(t_0)+\int_{t_0}^{t}\phi (t_0,\tau)B(\tau)u(\tau)d\tau]
x(t)=?(t,t0?)x(t0?)+∫t0?t??(t,τ)B(τ)u(τ)dτx(t)=?(t,t0?)[x(t0?)+∫t0?t??(t0?,τ)B(τ)u(τ)dτ]
2.4.4 系統輸出
對于系統方程(2)描述的線性時變系統,其輸出為:
y
(
t
)
=
C
(
t
)
?
(
t
,
t
0
)
x
(
t
0
)
+
C
(
t
)
∫
t
0
t
?
(
t
,
τ
)
B
(
τ
)
u
(
τ
)
d
τ
+
D
(
t
)
u
(
t
)
y(t)=C(t)\phi(t,t_0)x(t_0)+C(t)\int_{t_0}^{t}\phi(t,\tau)B(\tau)u(\tau)d\tau+D(t)u(t)
y(t)=C(t)?(t,t0?)x(t0?)+C(t)∫t0?t??(t,τ)B(τ)u(τ)dτ+D(t)u(t)
2.5 線性定常系統的離散化
線性定常系統:
{
x
ˊ
=
A
x
+
B
u
y
=
C
x
+
D
u
\begin{cases} \acute{x}=Ax+Bu\\[2ex] y=Cx+Du \end{cases}
????xˊ=Ax+Buy=Cx+Du?
離散化后系統方程為:
{
x
(
k
+
1
)
=
G
x
(
k
)
+
H
u
(
k
)
y
(
k
)
=
C
x
(
k
)
+
D
u
(
k
)
式
中
:
{
G
=
e
A
T
H
=
[
∫
0
T
e
A
τ
d
τ
]
B
C
=
C
D
=
D
\begin{cases} x(k+1)=Gx(k)+Hu(k)\\[2ex] y(k)=Cx(k)+Du(k) \end{cases}\\[3ex] 式中: \begin{cases} G= e^{AT}\\[2ex] H=[\int_{0}^{T}e^{A\tau}d\tau]B\\[2ex] C=C\\[2ex] D=D \end{cases}
????x(k+1)=Gx(k)+Hu(k)y(k)=Cx(k)+Du(k)?式中:????????????????????G=eATH=[∫0T?eAτdτ]BC=CD=D?
- 先求 e A t e^{At} eAt ,再求 e A T e^{AT} eAT ,其中 e A t e^{At} eAt 可利用【定義法】、【拉普拉斯變換法】、【凱萊-哈密頓定理】或【線性變換法】求出,
參考文獻
[1]:劉豹,唐萬生. 現代控制理論[M]. 北京:機械工業出版社,2006.7
[2]:王孝武. 現代控制理論基礎[M]. 3版 北京:機械工業出版社,2013.7
??本次的分享就到這里

如果我的博客對你有幫助、如果你喜歡我的博客內容,請 “點贊” “收藏” “關注” 一鍵三連哦!
更多精彩內容請前往 AXYZdong的博客
如果以上內容有任何錯誤或者不準確的地方,歡迎在下面 👇 留個言,或者你有更好的想法,歡迎一起交流學習~~~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/286222.html
標籤:其他
上一篇:實作一個在線抽獎系統,就算是個小白看了也能做出來(附原始碼)
下一篇:軟體測驗學習筆記6