摘要
我們提出了一個新的開源機器人的腿部力矩控制系統,這個系統的特點是低成本及結構簡單,這個系統由高力矩無刷直流舵機和適合阻抗調節和力矩控制的低傳動結構組成,同時我們也設計了一個適應沖撞的新型足底傳感器,四足機器人重2.2kg,有8個自由度,四條腿上都搭配了足底傳感器,其他零件由3D列印和現成的零件構成,可以做出重量輕且低成本的機器人,這也使得其他研究團隊可以快速開發和復制此專案,本文系統地描述了在靜態和動態條件下實作足部阻抗的方案,并將無主動阻抗控制調節的最大無量綱腿剛度(dimensionless stiffness)為10.8的腿與人類奔跑狀態下的腿部剛度(leg stiffness)進行對比測量,最后,我們演示了四足機器人的性能,提出了一種新的控制器,它將由 kino-dynamic 優化器計算的前饋接觸力與質心和基座方向的阻抗控制相結合,此控制模型可以在復雜多變的運動環境下保持穩定,
關鍵詞: 足式機器人,柔順性和阻抗控制,驅動和關節機構,力控制
Ⅰ. 介紹
在沒有大量硬體開發作業或維護成本的情況下,通常很難測驗腿部機器人的控制性能和學習演算法,現在的硬體機械結構復雜且昂貴,不同的機器人系統很難與其他的機器人進行對比,大部分系統也不能商業化,為了支持在學術研究上的快速和整體的進步,我們認為硬體、韌體和中間軟體一定要變得便宜且相對容易復制和實作,現在也有許多開源設計藍圖的低成本足式機器人平臺如 Oncilla [29]、Stanford-doggo [17],因此我們的研究人員借鑒我們的演算法在其他不同形態的機器人平臺上測驗和開發他們的構思,此外,從開源藍圖中產生的機器人的性能和能力可以直接在各個實驗室進行比較,
據我們所知,Stanford-doggo 是除我們之外唯一公開其力矩控制的足式機器人平臺,它的大部分零件是用水射流切割,相對容易生產,其他的開源(業余)專案大部分使用位置控制伺服電機,限制了它們應用高級的控制方法和學習演算法,四組機器人在展現出高性能的力矩控制的同時也代表了其實作的巨大的難度,如 HyQ [27], Anymal [12] 或者 MIT Cheetah [33].眾多的足式機器人像 Oncilla 和 Cheetah cub [30]使其同時包含機械柔順性( mechanical compliance)讓腿部馬達在收到外部干擾的情況下直接、迅速的反應,然而這需要復雜的機制使其有效地改變關節的剛度[11](stiffness ),
對于一個開源的腿型機器人來說,成功的標準是盡量減少需要精密加工的零件數量,從而能使用現成的組件而不是使用過于復雜的自定義設計方案,為了實作這一個目標 ,我們使用了當前最先進的低成本塑料3D列印和高性能無刷直流電機(BLDC),這些都是現在廣泛可用的現成組件,此外在移動設備市場化的浪潮下,我們可以用到價格合理的微型傳感器、低功耗和高性能的微型控制器以及先進的電池技術,
測驗先進的動態演算法locoarmotion[3],[21],[22]時,擁有輕量級、低成本但強大的機器人顯得特別重要,實際上,易于操作和協作的開源開發可以加快測驗周期,輕型機器人不需要起重機或導向結構,可以由一個研究人員在較小的實驗室空間中操作,它們還可以大大減少維修和維護的時間和成本,當直接在實際硬體[31],[32]上測驗學習演算法時和需要一個安全的平臺去探索各種控制模式時,這些特性變得尤為重要,
為了達成這些目標,我們提出了一個新型的、完全開源的模塊化腿部力矩控制制動器,用于機器人動態腿部的研究,本文作出了五個主要貢獻:1) 一種新型的輕量化、低復雜度、轉矩控制執行器模塊,適用于基于現成組件和3D列印部件的阻抗和力控制,2)10克以下的輕量級足部接觸傳感器,可提供全方位的可靠接觸檢測,可承受劇烈撞擊的機器人,3) 每條腿由兩個自由度和足底傳感器構成,當腿部剛度與人體跑動相似時能正常進行抗阻調節,4)四足機器人“solo”,由四條腿組裝而成,總質量為2.2kg,5)用于跟蹤控制全身運動的力矩控制器,使用kino-dynamic[9],[22]優化器(kino-dynamic motion optimizer),首次展示了在陌生環境下,機器人運動的真實情況,所有設計都是開源的,包括機械圖紙,電路原理和控制軟體[1],
Ⅱ. 平臺和機器人概述
A.制動器概念
1)無刷電機制動器模塊: 制動器模塊如圖2(a)所示,其由無刷電機(TMotor Antigravity 4004, 300KV),一個9:1的雙級時序同步帶(Conti Synchroflflex AT3 GEN III),高解析度光學編碼器(Avago AEDM 5810) 和一個直接安裝在電機軸上的轉速為5000的碼輪,所有的東西都包含在輕量級的3D列印外殼內,低傳動比(low transmission ratio) 合適在關節高速轉動時產生足夠大的峰值力矩,重要的是,在設計中為了保持高精準性/透明性(transparency)以實作單獨電機電流能對力矩進行準確的控制,該模塊的重量為150g,管段長度為160mm,該模塊的組裝很簡單,需要的組件很少,如圖2b所示,除電機軸和滑輪這些需要專門的機械制作的部件外,所有組件均為現成的或3D列印的,將所需的關節力矩轉換為所需的電機電流,需要用到這個公式:
τ
j
o
i
n
t
=
k
i
i
N
{\tau _{jo{\mathop{\rm int}} }} = {k_i}i N
τjoint?=ki?iN 其中的
k
i
=
0.025
N
m
/
A
{k_i} = 0.025Nm/A
ki?=0.025Nm/A ,齒輪減速裝置
N
=
9
N=9
N=9 以此推匯出
τ
j
o
i
n
t
=
0.225
i
{\tau _{jo{\mathop{\rm int}} }} = 0.225i
τjoint?=0.225i,制動器在
12
A
12A
12A 的電流時能輸出
τ
max
?
=
2.7
N
m
{\tau _{\max }} = 2.7Nm
τmax?=2.7Nm 的關節力矩,
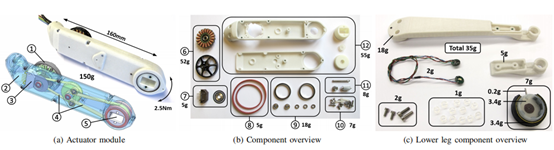
圖2 部件說明: 1、兩部分3D列印外殼結構2、高解析度編碼器3、同步帶4、輸出軸5、無刷電機6、光學編碼器7、同步帶8、軸承9、緊韌體10、機加工部件11、3D列印部件12、除了11之外的所有部件都是現成的,或者可以在普通的3D列印機上列印的,電機軸和滑輪11可以用庫存材料進行機械加工,
2)電力系統: 本文在實驗中使用現成的TI微控制器評估板(TI micro-controller evaluation boards),每個板都配有兩個BLDC(無刷直流電機)介面(圖3b.13 ),他們能進行磁場導向控制(FOC),并在10kHz條件下執行雙電機轉矩控制(圖.3a),為了減少電力模塊占用空間,我們對TI電機驅動模塊進行微型化處理,將質量減少了6倍,體積減少了10倍,如圖.3b所示,由此制造出的開源MPI微驅動電子設備(14),由一個TI的微控制器(TMS320F28069M)和兩個無刷電機驅動器芯片(DRV8305)焊接在一個6層印刷電路板上制成,該電路板作業在40V電壓,提供可編程的TAG埠、用于控制通信的CAN和SPI埠,
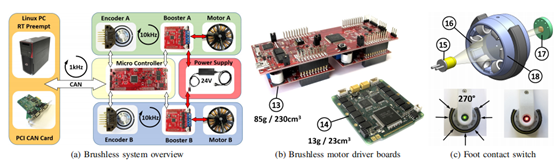
圖3 說明:
(a)CAN總線將電腦連接到微控制器板(TI評估板),兩個無刷直流電機控制在距離每個節點10kHz處,高解析度編碼器提供電機軸位置反饋,
(b)我們將一個現成的TI評估板13減少到我們的MPI微驅動電子板14中,通過來自兩個光學編碼器的反饋來控制兩個無刷電機,
(c)我們的定制腳接觸開關,在 270度 寬的沖擊方向上激活,
B.足底傳感器
此足部傳感器(圖3c)的設計是為了實作在輕微接觸和劇烈碰撞情況下的都能對足端接觸進行準確的判定,由于腳部的接觸點在崎嶇的地形中往往不可預測,我們設計的接觸激活的感應范圍為 270度,確保在復雜地形時機器人能對接觸進行對應的檢測,我們制作的機械裝置基于發光二極管(15)和光敏感元件(17)兩個元件,他們由彈簧進行分離,其中的機械直徑(18)為1.5mm,可以通過改變接觸傳感器的機械孔徑的直徑、長度或彈性硅膠元件(16)的數量來調整接觸傳感器的靈敏度,外力將孔徑移動2mm時產生0V到3V之間的模擬輸出信號,該信號由微控制器上的模數轉換器讀取,腳和小腿結構是用塑料列印的3D組件(圖2c),足底傳感器重10g,在接觸3N的力時在3ms內長生可靠觸發,該傳感器組裝簡單,靈敏度高,回應時間低,可承受高沖擊載荷,這使得它適用于在動態運動實驗中檢測接觸,
C. 2自由度的腿和四足機器人SOLO
一條2自由度的腿(圖4a)由兩個相同的無刷電機致動器模塊(髖部19、上肢20)和小腿(21)組成,接觸傳感器安裝在小腿的末端,所有關節都能轉動多周,由于空心段之間的電纜布線的限制,每個方向旋轉大約三周,
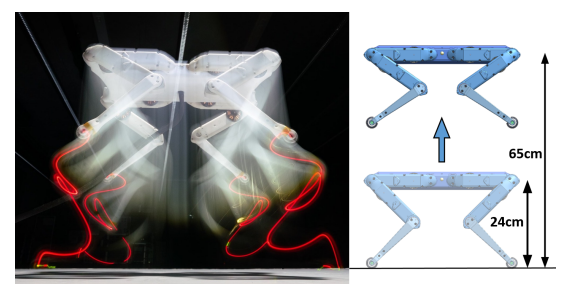
SOLO四足機器人由四條相同的腿和3D列印身體結構組組成(圖4c),機器人的八個自由度可在矢狀面(sagittal plane)上運動,在軀干的內部區域有控制8個BLDC電機的電子設備,Solo目前需要保持外部連接來進行資料傳輸和外部供電,該機器人重2.2公斤,站立的臀部高度約為24厘米(最大臀部高度為34厘米),身體長42厘米,寬33厘米,這個機器人可以折疊到5厘米高(圖4c),SOLO在三個軸上都時對稱的,
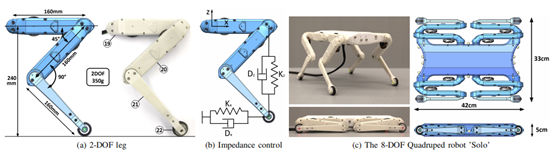
圖4 說明:
(a)兩個無刷執行器組件19和大腿20、小腿21和腳接觸開關22的裝配,在90?的膝角度下,2自由度的腿高0.24m,最大髖關節高度為0.34m,
(b)笛卡爾坐標系下阻抗框架的示意圖,
(c)這個2.2公斤的四足機器人可以折疊成一個5厘米的平面結構,
D.通信與控制軟體
雖然在TI和自定義電子板上都有用于有線通信的CAN埠,但我們還設計了一個輕量級主板,將機器人電機驅動程式和場外控制計算機之間的所有通信集合在一起,這個基于ESP32集成控制板由具有wifi功能的Xtensa LX6 SoC系統芯片(雙核,240MHz)和以太網介面構成,利用MPI微驅動器上的SPI埠(upstream SPI),以35μs長的單命令雙向SPI傳輸方式交換雙電動機狀態和控制命令資料,主板可控制多達8個雙電機驅動器,并連接到其他設備,如IMU和電池監視器,電路板可以通過有線(以太網)或無線(WiFi)網路介面與控制計算機連接,通信方式采用原始MAC層的點對點(P to P)協議和特別的通信協議/供應商特定的操作框架(vendor specifific action frames)進行實時通信,我們在100Mbit/s以太網實作下的往返通信延遲為200μs,包括電機控制延遲,WiFi連接在正常情況下的往返時間約為1100μs,平均資料包丟失約為4%,該協議保持傳輸完整的機器人狀態資料和傳感器資料,以防止WiFi上的資料包丟失,我們通過使用多強制轉換(multi-cast)來禁用WiFi確認包,以實作快速傳輸,并優先傳輸新資料,我們可以在1kHz的通信頻率下關閉12個自由度的控制回圈,這種開源的主板設計正在被用于最新版本的SOLO機器人與MPI微驅動器電子設備中,
2自由度的腿和四足機器人整體都由一臺運行Ubuntu系統的PC遠程控制,用RT-Preempt補丁控制它的實時功能,通信控制在1kHz頻率下進行控制,我們實作了驅動程式,將電子設備與控制PC進行通信,并可選擇CAN、以太網或WiFi三種通信方式,一個C++軟體包提供了一個API使PC與電機板介面進行通信,并具備設定電機轉動角度和力控制的基本功能,該API附帶了Python系結,從而實作了快速的原型化,我們使用C++介面來實作1kHz頻率下的控制回圈,在開源存盤庫[1]中提供了幾個快速測驗的演示程式,
雙足輪開源技術交流QQ群:543613782
原文論文:An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research——Felix Grimminger1, Avadesh Meduri1,3, Majid Khadiv1, Julian Viereck1,3, Manuel W¨uthrich1 Maximilien Naveau1, Vincent Berenz1, Steve Heim2, Felix Widmaier1, Thomas Flayols4 Jonathan Fiene2, Alexander Badri-Spr¨owitz2 and Ludovic Righetti1,3
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/286690.html
標籤:其他
上一篇:如何用STM32實作定時功能并報警(附代碼加原理講解,親測)
下一篇:簡單實作掌控板搶答器實驗