期刊:農業工程學報
發表時間:2018.04
0.平臺配置
- Intel? Xeon? CPU E3-1245 v3@ 3.40GHz 處理器,32GB 運行記憶體,2T硬碟容量,12GB GTX Titan X GPU,系統為 Ubuntu 14.04,
1.作者要解決的問題
- 解決未成熟芒果與樹葉顏色相似的問題(通過嵌入密集連接結構解決)
- 降低樹葉、枝干遮擋果實與果實重疊的影響(通過特殊前景區域標注解決)
- 在真實場景下,降低光照多樣性及背景復雜性的影響(通過自適應直方圖均衡化解決)
2.創新的網路模型及原因
- 改進的 YOLO v2 網路,設計帶有密集連接的 Tiny-yolo 結構,該網路可實作多次特征的復用和融合,作者將該網路命名為 Tiny-yolo-dense,
3.相關評價指標水平
- FPS:83
- AP:97.02%
- AR:95.1%
本人認為以上資料指標達到了一個相當不錯的水平
4.影像預處理
- 運用自適應直方圖均衡化減小光強對影像的影響;同時增加了樣本影像光照的多樣行,擴增了樣本數量,
(本人認為該方法已普遍應用在解決影像明暗差異上,并非值得作者驕傲的創新點) - 作者考慮到樹冠上大部分芒果呈豎直懸掛姿態,而部分芒果因枝干或其他芒果的阻擋呈多角度傾斜懸掛姿態,故本文對訓練樣本進行了水平鏡像翻轉、以及±10°、±20°旋轉操作,并對影像進行居中截取,
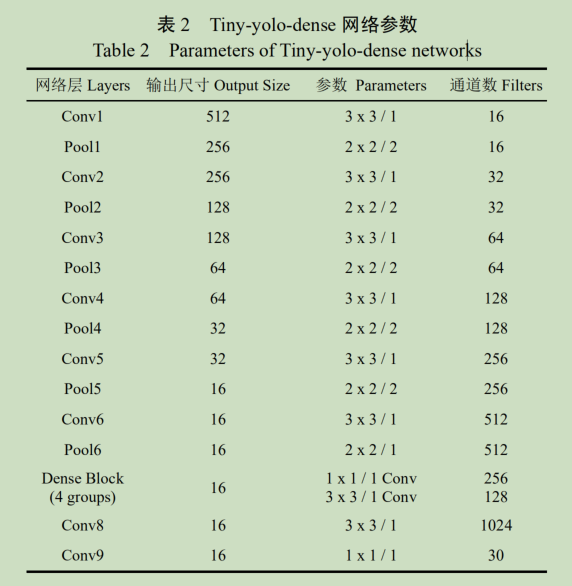
5.Tiny-yolo-dense網路結構圖及引數表
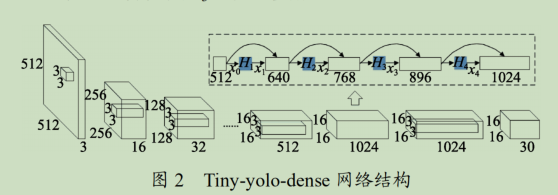
- 利用密集模塊(上圖虛線框)代替 Tiny-yolo 的第 7 層卷積層
- 虛線框內的Hi (i=1,2,3,4)表示BN、ReLU及卷積的組合
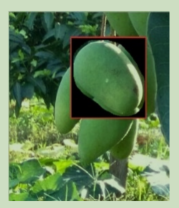
6.訓練樣本目標前景區域標注
- anchor區域內將目標背景區域的像素置零,降低非前景特征的干擾,降低樹葉、枝干或重疊的非本目標果實等無關資訊特征對目標特征提取的影響
- 但保留目標輪廓外圍一定區域(5~10 個像素),加強目標邊緣的前景區域特征學習
7.結果與分析
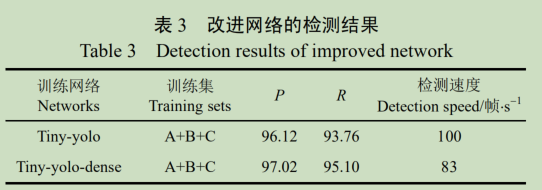
- 改進后準確率和召回率相比改進前分別提高了 0.9%和 1.34%
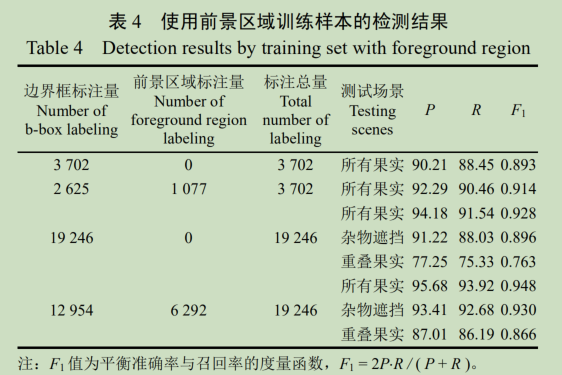
- 對測驗集中所有果實準確率和召回率分別提高了 1.5%和 2.38%,對雜物遮擋果分別提高了 2.19%和 4.65%,對重疊果實分別提高了 9.76%和 10.86%
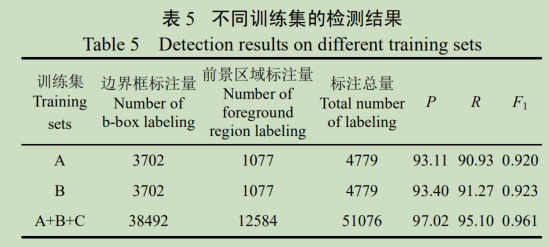
- A表示原始資料;B表示自適應直方圖均衡化處理后;C表示旋轉處理后
8.本文的不足
- 影像的標注需要的大量的時間,尤其是將anchors內的非前景區域像素置為0
- 嵌入密集連接dense結構,導致網路引數變大,降低了FPS(在所難免)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/286836.html
標籤:其他