一、環境介紹
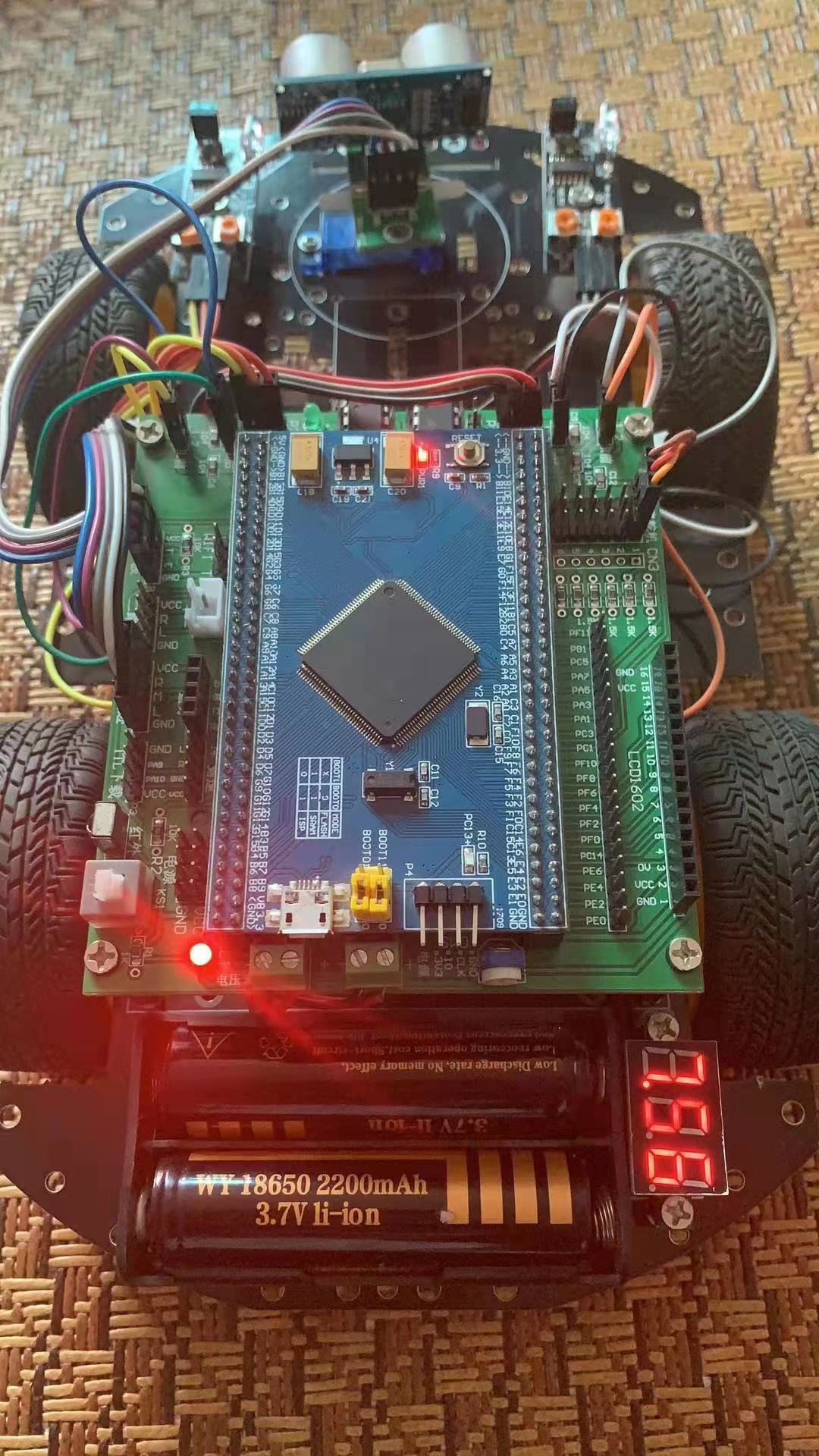
小車主控MCU: STM32F103ZET6
STM32程式開發IDE: keil5
STM32程式風格: 采用暫存器方式開發,注釋齊全,執行效率高,方便移植
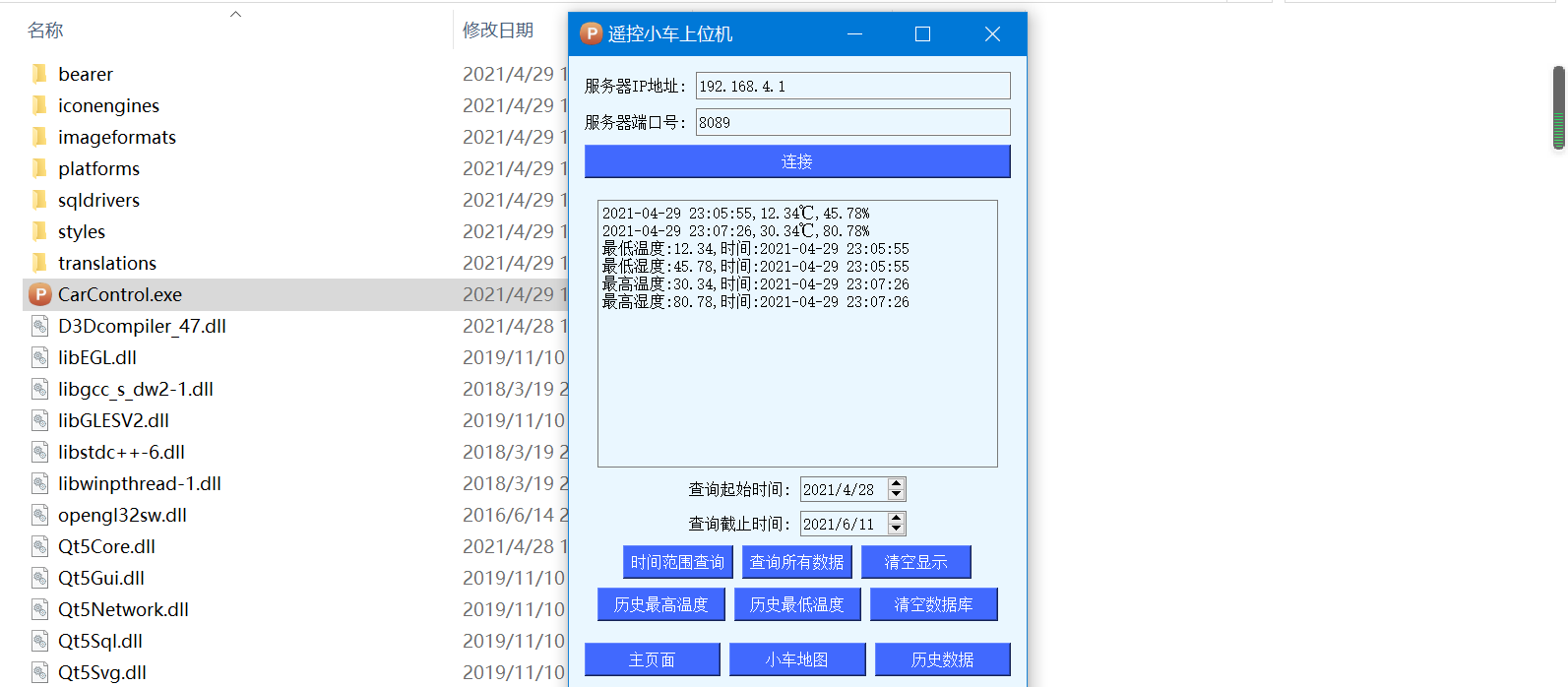
手機APP: 采用QT設計,程式支持跨平臺編譯運行(Android、IOS、Windows、Linux都可以編譯運行,對應平臺上QT的環境搭建,之前博客已經發了文章講解)
硬體包含: 淘寶購買的完整一套4輪遙控小車(采用STM32F103ZET6作為主控板)、DHT11溫濕度傳感器、中科微GPS模塊、ESP8266
小車完整原始碼下載地址: https://download.csdn.net/download/xiaolong1126626497/19557040
APP完整原始碼下載地址: https://download.csdn.net/download/xiaolong1126626497/19557009
二、功能介紹
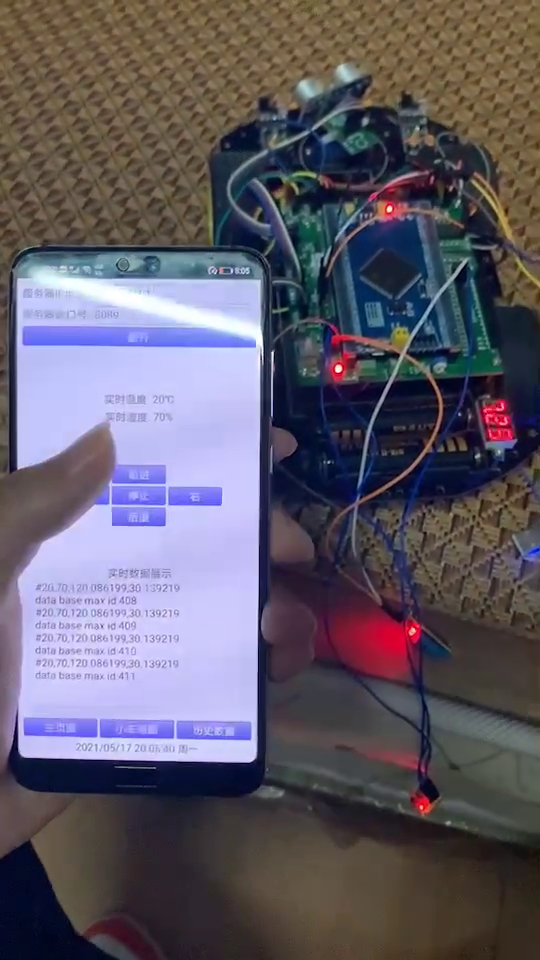
這是基于STM32設計的4輪遙控小車,支持通過Android手機APP、Windows上位機完成對小車遙控;支持前進、后退、左轉、右轉、停止等操作,
小車上會實時采集溫度、濕度、GPS經緯度、通過ESP8266 WIFI上傳至手機APP,手機APP收到資料之后,會將溫濕度實時顯示出來,經緯度收到后會呼叫百度地圖,顯示小車的位置,并且資料也會存放到資料庫里,方便查看歷史資料;支持范圍內溫濕度查詢、最高溫濕度、最低溫濕度查詢,
小車電機驅動模塊采用L298N、WIFI模塊采用ESP8266、MCU采用STM32F103C8T6、溫濕度模塊采用DTH11、GPS模塊采用北斗GPS+BDS,

三、相關硬體介紹



四、程式原始碼
硬體連接說明:
GPS接的串口1: PA3(RX) --5V~3.3V
WIFI接的串口3: PB10(TX)--->接ESP8266的RX PB11(RX)--->接ESP8266的TX --3.3V
DHT11溫濕度接: PA7
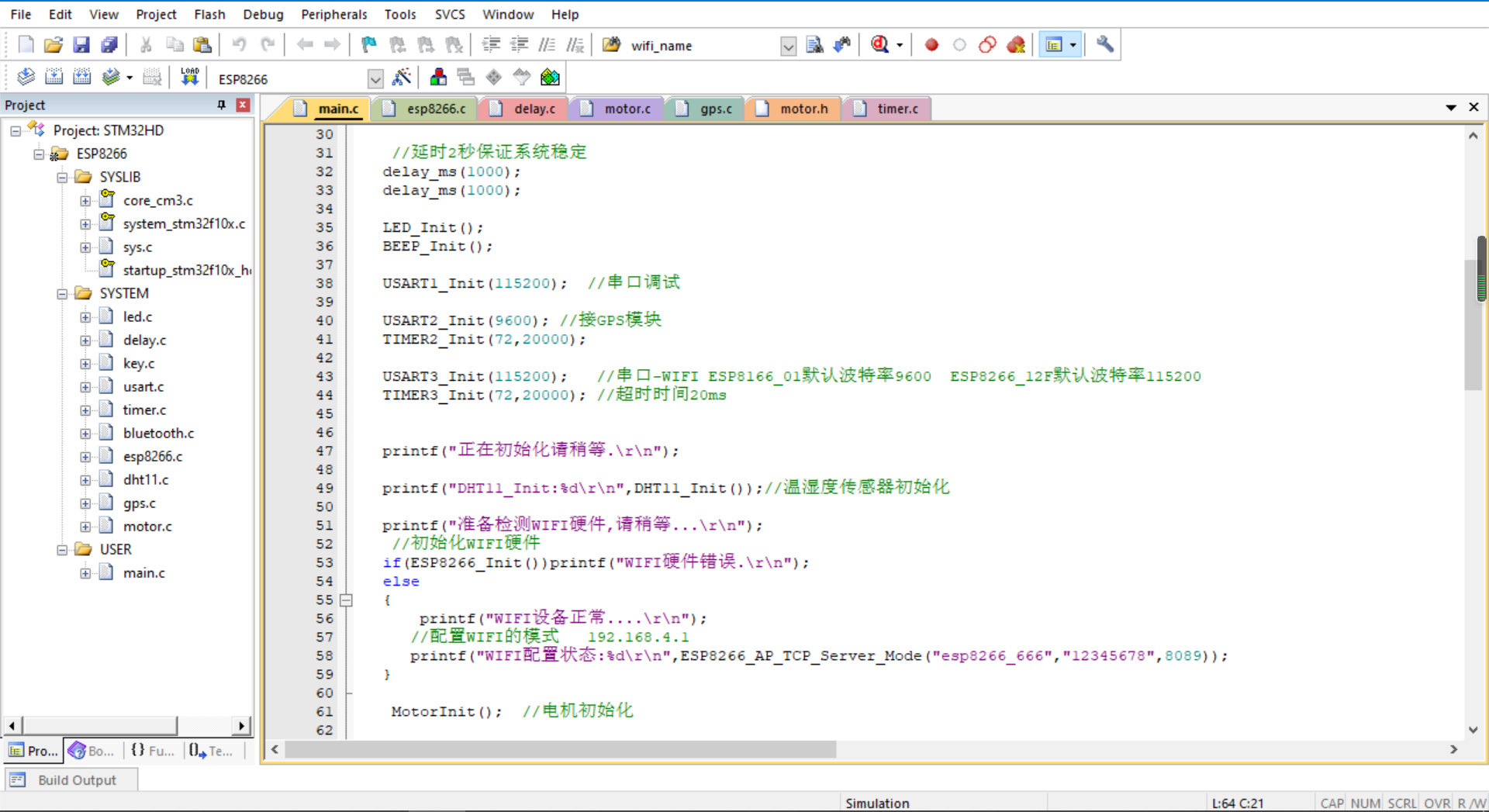
4.1 STM32小車端: main.c原始碼
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "key.h"
#include "usart.h"
#include <string.h>
#include "timer.h"
#include "bluetooth.h"
#include "esp8266.h"
#include "dht11.h"
#include "gps.h"
#include "motor.h"
/*
硬體連接說明:
GPS接的串口1: PA3(RX) --5V~3.3V
WIFI接的串口3: PB10(TX)--->接ESP8266的RX PB11(RX)--->接ESP8266的TX --3.3V
DHT11溫濕度接: PA7
*/
u8 ESP8266_SendBuff[50];
char Buffer[1024];
int main()
{
u32 time_cnt=0;
double Longitude=120.086199;
double latitude=30.139219;
u8 temp=20;
u8 humi=70;
//延時2秒保證系統穩定
delay_ms(1000);
delay_ms(1000);
LED_Init();
BEEP_Init();
USART1_Init(115200); //串口除錯
USART2_Init(9600); //接GPS模塊
TIMER2_Init(72,20000);
USART3_Init(115200); //串口-WIFI ESP8166_01默認波特率9600 ESP8266_12F默認波特率115200
TIMER3_Init(72,20000); //超時時間20ms
printf("正在初始化請稍等.\r\n");
printf("DHT11_Init:%d\r\n",DHT11_Init());//溫濕度傳感器初始化
printf("準備檢測WIFI硬體,請稍等...\r\n");
//初始化WIFI硬體
if(ESP8266_Init())printf("WIFI硬體錯誤.\r\n");
else
{
printf("WIFI設備正常....\r\n");
//配置WIFI的模式 192.168.4.1
printf("WIFI配置狀態:%d\r\n",ESP8266_AP_TCP_Server_Mode("esp8266_666","12345678",8089));
}
MotorInit(); //電機初始化
//電機脈沖控制
TIMER4_Init(72,1000);
while(1)
{
//接收到GPS的資料
if(USART2_RX_FLAG)
{
USART2_RX_BUFFER[USART2_RX_CNT]='\0';
//決議經緯度
GPS_GNRMC_Decoding((char*)USART2_RX_BUFFER,&Longitude,&latitude);
USART2_RX_CNT=0;
USART2_RX_FLAG=0;
//列印到串口除錯助手
printf("GPS:%f,%f\r\n",Longitude,latitude);
}
//接收到WIFI的資料
if(USART3_RX_FLAG)
{
USART3_RX_BUFFER[USART3_RX_CNT]='\0';
printf("WIFI:%s\r\n",USART3_RX_BUFFER);
strcpy(Buffer,(char*)USART3_RX_BUFFER);
USART3_RX_CNT=0;
USART3_RX_FLAG=0;
BEEP=1;
delay_ms(50);
BEEP=0;
if(strstr((char*)Buffer,":a"))
{
printf("向前...\r\n");
CarGo();
}
else if(strstr((char*)Buffer,":b"))
{
printf("后退...\r\n");
CarBack();
}
else if(strstr((char*)Buffer,":c"))
{
printf("向左...\r\n");
CarLeft();
}
else if(strstr((char*)Buffer,":d"))
{
printf("向右...\r\n");
CarRight();
}
else if(strstr((char*)Buffer,":e"))
{
printf("停止...\r\n");
CarStop();
}
}
time_cnt++;
delay_ms(10);
//判斷輪詢時間
if(time_cnt>=100*2)
{
time_cnt=0;
//讀取溫濕度資料
DHT11_Read_Data(&temp,&humi);
sprintf((char*)ESP8266_SendBuff,"#%d,%d,%f,%f",temp,humi,Longitude,latitude);
//向服務器上傳資料
ESP8266_ServerSendData(0,ESP8266_SendBuff,strlen((char*)ESP8266_SendBuff));
//列印到串口除錯助手
printf("ESP8266_SendBuff:%s\r\n",(char *)ESP8266_SendBuff);
//運行狀態
Motor_LED=!Motor_LED;
}
}
}
4.2 STM32小車端: 電機控制原始碼
#include "motor.h"
//全域變數定義
unsigned int speed_count=0;//占空比計數器 50次一周期
int front_left_speed_duty=SPEED_DUTY;
int front_right_speed_duty=SPEED_DUTY;
int behind_left_speed_duty=SPEED_DUTY;
int behind_right_speed_duty=SPEED_DUTY;
unsigned char continue_time=0;
//根據占空比驅動電機轉動
void CarMove(void)
{
BEHIND_RIGHT_EN;
//右前輪
if(front_right_speed_duty > 0)//向前
{
if(speed_count < front_right_speed_duty)
{
FRONT_RIGHT_GO;
}else //停止
{
FRONT_RIGHT_STOP;
}
}
else if(front_right_speed_duty < 0)//向后
{
if(speed_count < (-1)*front_right_speed_duty)
{
FRONT_RIGHT_BACK;
}else //停止
{
FRONT_RIGHT_STOP;
}
}
else //停止
{
FRONT_RIGHT_STOP;
}
//左后輪
if(behind_left_speed_duty > 0)//向前
{
if(speed_count < behind_left_speed_duty)
{
BEHIND_LEFT_GO;
} else //停止
{
BEHIND_LEFT_STOP;
}
}
else if(behind_left_speed_duty < 0)//向后
{
if(speed_count < (-1)*behind_left_speed_duty)
{
BEHIND_LEFT_BACK;
} else //停止
{
BEHIND_LEFT_STOP;
}
}
else //停止
{
BEHIND_LEFT_STOP;
}
}
//向前
void CarGo(void)
{
front_left_speed_duty=SPEED_DUTY;
front_right_speed_duty=SPEED_DUTY;
behind_left_speed_duty=SPEED_DUTY;
behind_right_speed_duty=SPEED_DUTY;
}
//后退
void CarBack(void)
{
front_left_speed_duty=-SPEED_DUTY;
front_right_speed_duty=-SPEED_DUTY;
behind_left_speed_duty=-SPEED_DUTY;
behind_right_speed_duty=-SPEED_DUTY;
}
//向左
void CarLeft(void)
{
front_left_speed_duty=-20;
front_right_speed_duty=SPEED_DUTY;
behind_left_speed_duty=-20;
behind_right_speed_duty=SPEED_DUTY+10;//增加后輪驅動力
}
//向右
void CarRight(void)
{
front_left_speed_duty=SPEED_DUTY;
front_right_speed_duty=-20;
behind_left_speed_duty=SPEED_DUTY+10;//增加后輪驅動力
behind_right_speed_duty=-20;
}
//停止
void CarStop(void)
{
front_left_speed_duty=0;
front_right_speed_duty=0;
behind_left_speed_duty=0;
behind_right_speed_duty=0;
}
/*
FRONT_LEFT_F_PIN PG13 左前前進IO
FRONT_LEFT_B_PIN PG11 左前后退IO
FRONT_RIGHT_F_PIN PC11 右前前進IO
FRONT_RIGHT_B_PIN PD0 右前后退IO
BEHIND_LEFT_F_PIN PD6 左后前進IO
BEHIND_LEFT_B_PIN PG9 左后后退IO
右后電機的兩個控制IO這里改為兩路使能EN1、EN2,高電平有效
BEHIND_RIGHT_F_PIN PD4 右電機使能IO
BEHIND_RIGHT_B_PIN PD2 左電機使能IO
*/
void MotorInit(void)
{
RCC->APB2ENR|=1<<8; //PG
RCC->APB2ENR|=1<<5; //PD
RCC->APB2ENR|=1<<4; //PC
GPIOG->CRH&=0xFF0F0F0F;
GPIOG->CRH|=0x00303030;
GPIOD->CRL&=0xF0F0F0F0;
GPIOD->CRL|=0x03030303;
GPIOC->CRH&=0xFFFF0FFF;
GPIOC->CRH|=0x00003000;
CarStop();
}
4.3 STM32小車端: ESP8266 WIFI原始碼
#include "esp8266.h"
u8 ESP8266_IP_ADDR[16]; //255.255.255.255
u8 ESP8266_MAC_ADDR[18]; //硬體地址
/*
函式功能: ESP8266命令發送函式
函式回傳值:0表示成功 1表示失敗
*/
u8 ESP8266_SendCmd(char *cmd)
{
u8 i,j;
for(i=0;i<10;i++) //檢測的次數--發送指令的次數
{
USART3_RX_FLAG=0;
USART3_RX_CNT=0;
USARTx_StringSend(USART3,cmd);
delay_ms(200);
if(USART3_RX_FLAG)
{
USART3_RX_BUFFER[USART3_RX_CNT]='\0';
USART3_RX_FLAG=0;
USART3_RX_CNT=0;
if(strstr((char*)USART3_RX_BUFFER,"OK"))
{
return 0;
}
}
}
return 1;
}
/*
函式功能: ESP8266硬體初始化檢測函式
函式回傳值:0表示成功 1表示失敗
*/
u8 ESP8266_Init(void)
{
ESP8266_SendCmd("+++");
delay_ms(200);
ESP8266_SendCmd("+++");
delay_ms(200);
return ESP8266_SendCmd("AT\r\n");
}
/*
函式功能: 一鍵配置WIFI為AP+TCP服務器模式
函式引數:
char *ssid 創建的熱點名稱
char *pass 創建的熱點密碼 (最少8位)
u16 port 創建的服務器埠號
函式回傳值: 0表示成功 其他值表示對應錯誤值
*/
u8 ESP8266_AP_TCP_Server_Mode(char *ssid,char *pass,u16 port)
{
char *p;
u8 i;
char tmp_buff[100];
/*1. 測驗硬體*/
if(ESP8266_SendCmd("AT\r\n"))return 1;
/*2. 關倍訓顯*/
if(ESP8266_SendCmd("ATE0\r\n"))return 2;
/*3. 設定WIFI模式*/
if(ESP8266_SendCmd("AT+CWMODE=2\r\n"))return 3;
/*4. 復位*/
ESP8266_SendCmd("AT+RST\r\n");
delay_ms(1000);
delay_ms(1000);
delay_ms(1000);
/*5. 關倍訓顯*/
if(ESP8266_SendCmd("ATE0\r\n"))return 5;
/*6. 設定WIFI的AP模式引數*/
sprintf(tmp_buff,"AT+CWSAP=\"%s\",\"%s\",1,4\r\n",ssid,pass);
if(ESP8266_SendCmd(tmp_buff))return 6;
/*7. 開啟多連接*/
if(ESP8266_SendCmd("AT+CIPMUX=1\r\n"))return 7;
/*8. 設定服務器埠號*/
sprintf(tmp_buff,"AT+CIPSERVER=1,%d\r\n",port);
if(ESP8266_SendCmd(tmp_buff))return 8;
/*9. 查詢本地IP地址*/
if(ESP8266_SendCmd("AT+CIFSR\r\n"))return 9;
//提取IP地址
p=strstr((char*)USART3_RX_BUFFER,"APIP");
if(p)
{
p+=6;
for(i=0;*p!='"';i++)
{
ESP8266_IP_ADDR[i]=*p++;
}
ESP8266_IP_ADDR[i]='\0';
}
//提取MAC地址
p=strstr((char*)USART3_RX_BUFFER,"APMAC");
if(p)
{
p+=7;
for(i=0;*p!='"';i++)
{
ESP8266_MAC_ADDR[i]=*p++;
}
ESP8266_MAC_ADDR[i]='\0';
}
//列印總體資訊
printf("當前WIFI模式:AP+TCP服務器\n");
printf("當前WIFI熱點名稱:%s\n",ssid);
printf("當前WIFI熱點密碼:%s\n",pass);
printf("當前TCP服務器埠號:%d\n",port);
printf("當前TCP服務器IP地址:%s\n",ESP8266_IP_ADDR);
printf("當前TCP服務器MAC地址:%s\n",ESP8266_MAC_ADDR);
return 0;
}
/*
函式功能: TCP服務器模式下的發送函式
發送指令:
*/
u8 ESP8266_ServerSendData(u8 id,u8 *data,u16 len)
{
u8 i,j,n;
char ESP8266_SendCMD[100]; //組合發送程序中的命令
for(i=0;i<10;i++)
{
sprintf(ESP8266_SendCMD,"AT+CIPSEND=%d,%d\r\n",id,len);
USARTx_StringSend(USART3,ESP8266_SendCMD);
delay_ms(200);
if(USART3_RX_FLAG)
{
USART3_RX_BUFFER[USART3_RX_CNT]='\0';
USART3_RX_FLAG=0;
USART3_RX_CNT=0;
if(strstr((char*)USART3_RX_BUFFER,">"))
{
//繼續發送資料
USARTx_DataSend(USART3,data,len);
//等待資料發送成功
delay_ms(200);
if(USART3_RX_FLAG)
{
USART3_RX_BUFFER[USART3_RX_CNT]='\0';
USART3_RX_FLAG=0;
USART3_RX_CNT=0;
if(strstr((char*)USART3_RX_BUFFER,"SEND OK"))
{
return 0;
}
}
}
}
}
return 1;
}
4.4 QT軟體端代碼布局
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/287465.html
標籤:其他