本文主要介紹boost庫中矩形布爾運算的思路和代碼決議,在此感謝Intel對開源事業的貢獻,
基本概念
圖形的插入
所有的操作的第一步都是進行圖形的插入,我們需要宣告定義好我們要使用的圖形型別,以矩形為例,方式為:
rectangle_data(T xl, T yl, T xh, T yh)
實體如下:
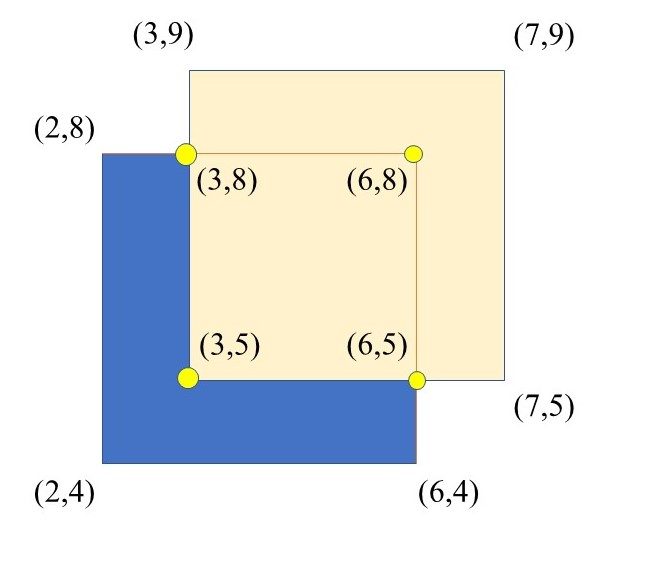
ps1.insert(rectangle_data<int>(3,5,7,9));
ps2.insert(rectangle_data<int>(2,4,6,8));
xl, yl, xh, yh分別為x最小值,y最小值,x最大值,y最大值,分別為矩形的右下角左邊和左上角坐標,
頂點與多邊形的轉化——微分
在Boost演算法中,一個基本的實作邏輯是通過計算多邊形的導數來代表多邊形的x和y坐標點變化
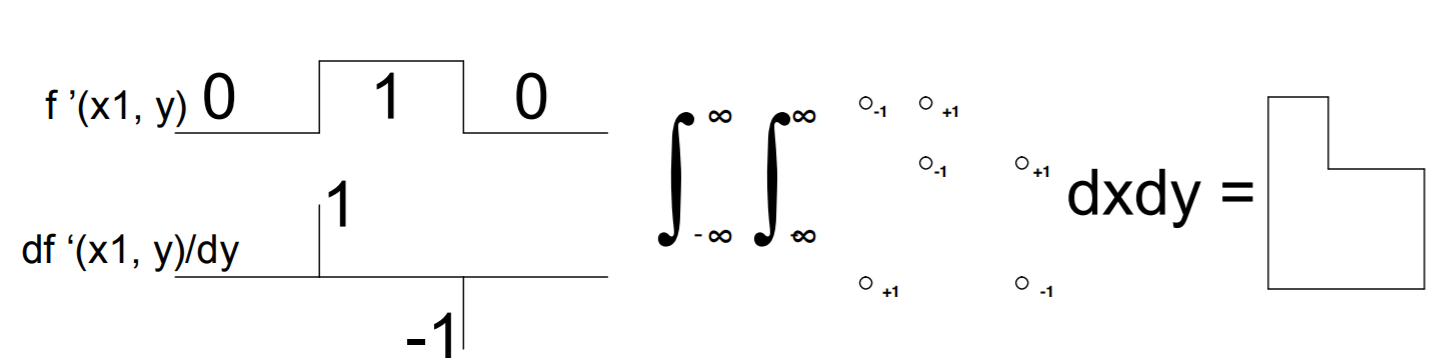
在對矩形的端點進行導數計算后,從左到右掃描所有矩形的點y坐標形成的豎直區間,對于矩形,豎直區間導數值等于下端點的導數值, 在代碼實作上,boost并不真的求導,而只是按順序分配,給四個頂點以1和-1的值,以加快運行速度,
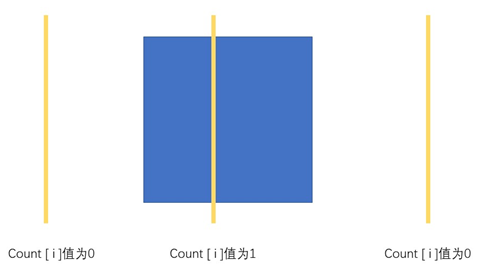
從左到右掃描所有矩形的點形成的區間,累加導數值,記錄為count,來判斷是否應該將該區間加入結果中,
假設有n個矩形進行布爾運算,那么設立一個長度為n的陣列count,count[i]代表第i個矩形,布爾運算完成之后的圖形設為 Result,掃描的方式是從左到右進行掃描,
計算加入區間ivl前總體狀態值before和加入ivl之后after,對于不同的布爾運算,總體狀態值的計算方式也不一致,
1.對于或運算,從count[0]和count[1]任一值為1,就能計算出當前總體狀態值為true,
2.對于與運算,就需要從count[0]和count[1]所有值全為1,才能計算出當前總體狀態值為true,
總體狀態值before或after等于true,那么代表位于Result內部,
等于false自然代表位于Result外部,
顯然對于一個區間,加入他前后如果都在Result內部,或者都在Result外部,這個區間就不是Result的邊,反之,如果由內到外或者由外到內,這個區間就是Result的邊,應該加入結果中,
布爾運算代碼詳解
首先宣告矩形,方式為
rectangle_data(T xl, T yl, T xh, T yh)
xl, yl, xh, yh分別為x最小值,y最小值,x最大值,y最大值,
定義三個矩形集合ps1, ps2和ps_tmp,
ps1內包含一個值為(3,5,7,9)的矩形, ps2包含一個值為(2,4,6,8)的矩形,ps_tmp保存結果,
做布爾與運算
ps_tmp=ps1*ps2
通過多載運算子*的形式,進入布爾運算流程,
polygon_90_set_view<geometry_type_1, geometry_type_2, boolean_op::BinaryAnd>
(
lvalue,
rvalue,
polygon_90_set_traits<geometry_type_1>::orient(lvalue),
boolean_op::BinaryAnd()
);
lvalue即ps1, rvalue即ps2,
初始化
資料型別介紹:
-
interval_data:區間資料,用于掃描線, -
polygon中端點資料結構形如:
(first,(second.first,second.second))first存盤端點的x值,second.first存盤端點的y值,second.second存盤端點的導數值,
有幾個變數需要得到初始化:
orient:方向,每個 polygon_90_set_data 都有,默認為1.data_:保存著端點的資料,
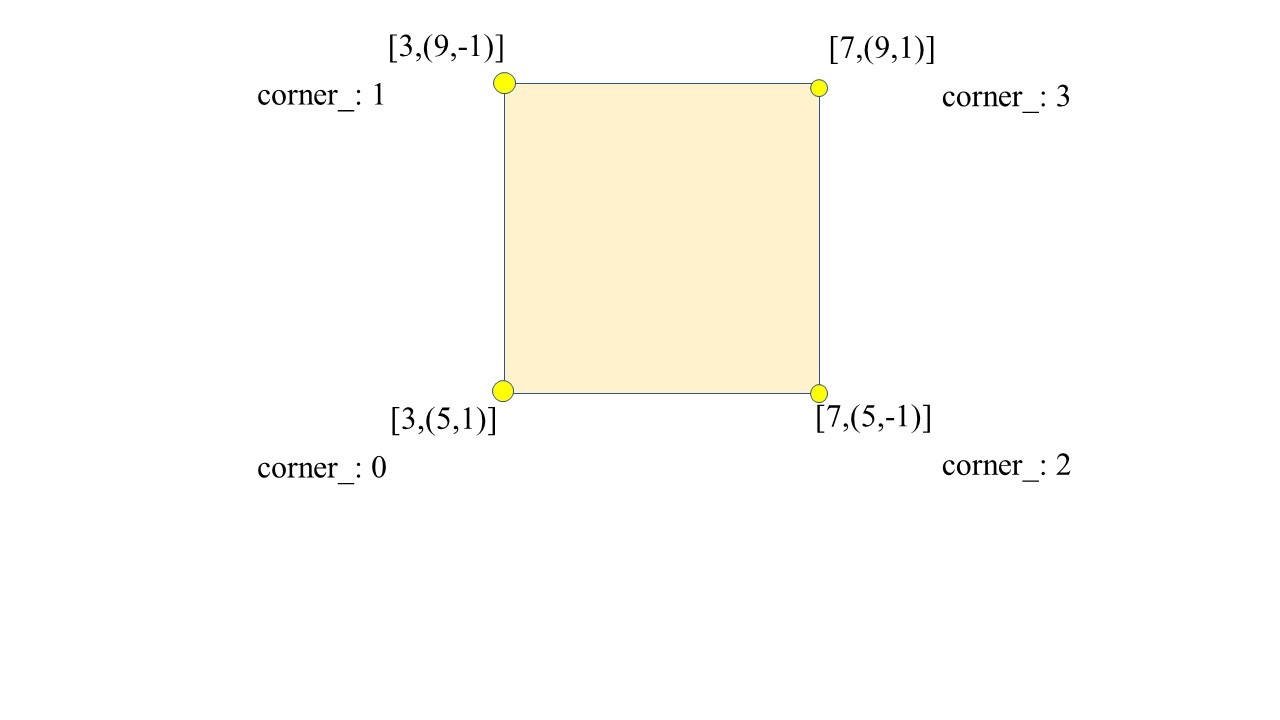
data_的初始化在insert時就已經完成,首先默認如下圖所示,標記各個頂點,標記名為corner_,值為0,1,2,3(矩形條件下),按照0,1,2,3的順序依次標記各個點的導數值為1,-1,-1,1,需要注意的是在有hole的情況下,導數值會發生變化,具體執行函式位于iterator_geometry_to_set.hpp 52行 inline reference operator*()處,
compute_90_set_value
計算首先在名為 compute_90_set_value 的結構體中進行,將ps1,ps2分別作為lvalue_和rvalue_傳入,
假如ps1和ps2的orient(方向)相同,那么:
- 對ps1和ps2均進行端點sort,先按x坐標升序排序,若x坐標相同,再按y坐標升序排序,如下圖所示,ps1排序后頂點順序為(3,5),(3,9),(7,5),(7,9),
呼叫
output_.applyBooleanBinaryOp
(
lvalue_.begin(), lvalue_.end(),
rvalue_.begin(), rvalue_.end(),
boolean_op::BinaryCount<op_type>()
);
進入applyBooleanBinaryOp函式,
applyBooleanBinaryOp
變數介紹:
itr1:迭代器,用于ps1遍歷,itr2:迭代器,用于ps2遍歷,output:布爾運算得到的結果,container: vector型別,保存著每次計算得到的結果,其中元素型別為
pair<interval_data<Unit>, int>curCoord:記錄當前x值,curPosition:記錄當前y值,curCount:curCount[0]記錄當前區間的屬于ps1的端點導數值,curCount[1]記錄當前區間的屬于ps2的端點導數值,prevCoord:前一個被處理的點的x值,prevPosition:前一個被處理的點的y值,count:累加所有已處理的區間的下端點的導數值,
遍歷ps1和ps2中的所有點,當他們都未被遍歷完時:
-
選擇itr1和itr2之中x值更小的點,使curCoord為其x值,curPosition為對應的y值,curCoount=defaultCount,如果選擇itr1,curCount[0]加上itr1的導數值,否則,curCount[1]加上itr2的count值,
-
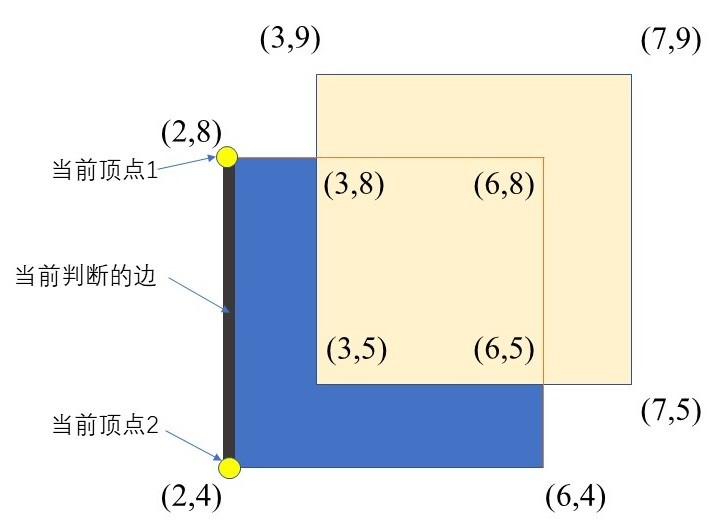
如果prevCoord!=curCoord,即兩個端點的x值不一致,不能形成一條豎直方向的掃描線區間,不再進行后續處理,直接進行下次回圈,呼叫advanceScan函式使scanData迭代器回到
scanData.begin(),并直接更新prevCoord,prevPosition,count,如下圖所示,當前一點為(2,8),現端點為(3,5)時,二者不在同一豎直線上,不再進行后續處理,
-
否則,繼續處理,宣告并定義變數ivl,ivl的下界為prevPosition,上界為curPosition,
-
清理container為空,
-
呼叫
boolean.processInterval(container, ivl, count)進行區間的處理和計算,將結果加入container中, -
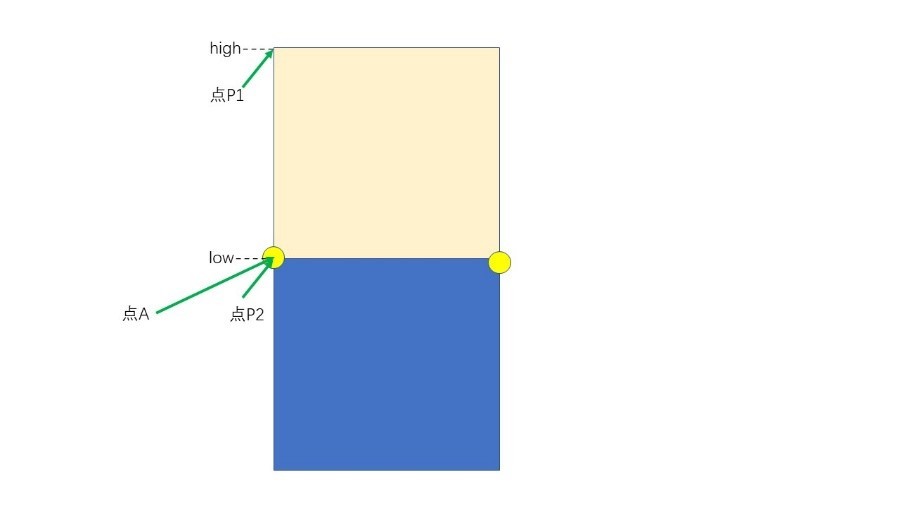
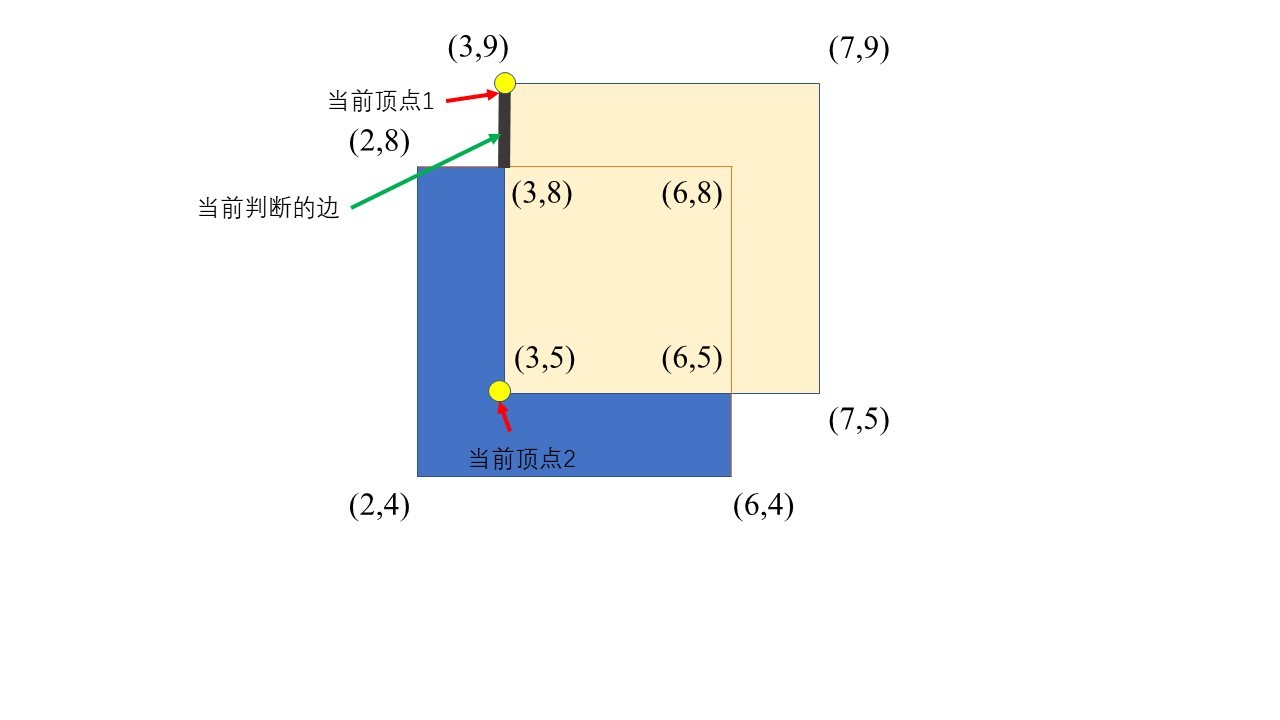
遍歷container中所有interval元素,將prevCoord和元素的上界high聯合成為新端點P1并加入output中,另外,當將prevCoord和元素的下界low聯合成新端點P2,但若P2與output中最后一個端點A重合(如下圖所示,點A與low重合),則將點A移除(為了合并區間),否則加入P2到output,
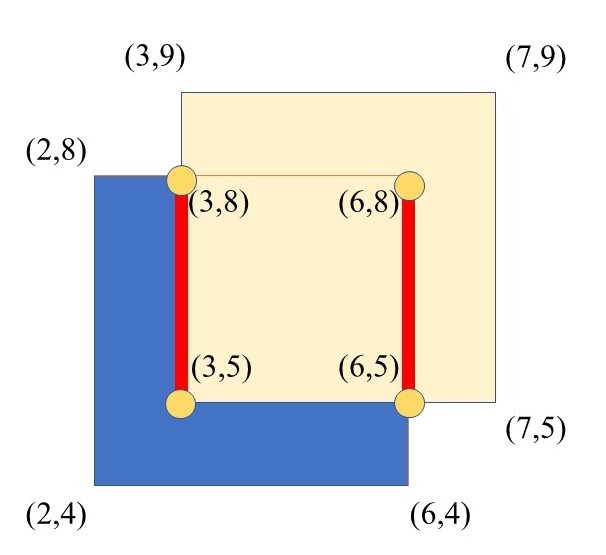
遍歷結束,回傳output,計算完畢,如下圖所示,(3,5),(3,8),(6,5),(6,8)四個點就是布爾運算后的結果中所保存的點,
processInterval
processInterval函式用于計算結果,
變數介紹:
ivl:即輸入變數interval,下界和上界分別為low和high,outputContainer:一個vector向量,用于保存結果interval,即輸出,deltaCount:也就是count,累加所有已處理的區間的下端點的導數值,
具體來說:
- 對比當前interval與scacnData,如果當前interval覆寫到了scanData沒有覆寫到的區域,根據當前interval擴展scanData,例如第一次進入processInterval時,將區間[4,8]傳入,此時scanData 中沒有資料,擴展scanData ,
- 在scanData中,由輸入的ivl的下界low開始,到ivl的high結束,生成新interval,將新生成的interval輸入到evaluateInterval進行判斷,判斷是否加入outputContainer中,
- 在evaluateInterval函式中,通過
以 ps1和ps2為例,流程如下
- 將區間[4,8]傳入processInterval ,此時scanData 中沒有資料,擴展scanData ,
判斷[4,8]是否需要加入outputContainer中,判斷結果為不需要, - 將區間[5,9]傳入,傳入之前scanData為[4,8],擴展,擴展后為[4,5,8,9],
判斷[5,8],[8,9]是否需要加入outputContainer中,[5,8]加入, - 將區間[4,8]傳入 ,判斷[4,5],[5,8],[5,8]加入,
- 將區間[5,9]傳入,判斷[5,9],不加入,
判斷區間
判斷區間在evaluateInterval中進行,
變數介紹:
1.ivl:區間interval,
2.beforeCount:代表scanData尚未加入ivl時的count值,保存了所有圖形掃到的導數值之和,
3.afterCount:代表scanData加入ivl后的count值,保存了所有圖形掃到的導數值之和,
假設有n個矩形進行布爾運算,那么設立一個長度為n的陣列count,count[i]代表第i個矩形,布爾運算完成之后的圖形設為 Result.
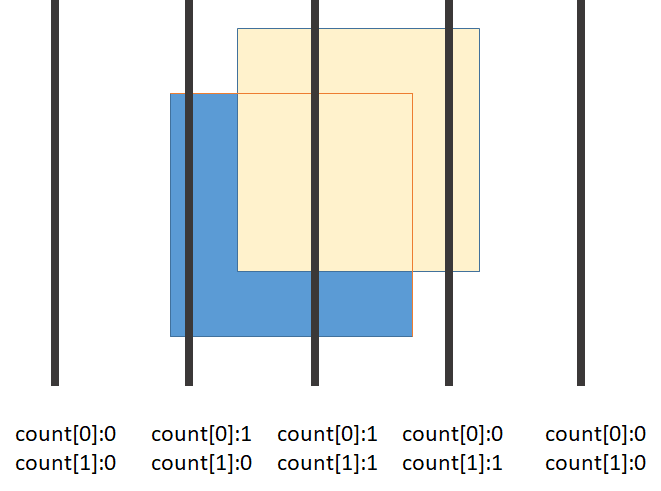
從左到右進行掃描,count值的變化情況如下:
0(尚未掃到該矩形) -----1(當前正在該矩形內部)-----0(離開該矩形),
判斷代碼:
bool before = (int)beforeCount > 0;
bool after = (int)afterCount > 0;
int value = https://www.cnblogs.com/BYGAO/p/(!before & after) - (before & !after);
通過多載的方式,對于布爾運算進行不同的操作,
before和after即總體狀態值,為true則代表在結果圖形Result之內,否則代表在Result之外,
對于或運算的總體狀態值,從count[0]和count[1]任一值為1,考慮到或運算需要將所有圖形加入結果中,就代表當前總體狀態值為true,
而對于與運算,就需要從count[0]和count[1]所有值全為1,才能判定位于結果圖形之內,總體狀態值為true,
當進行與運算時,代碼如下:
bool before = (int)beforeCount > 0;
呼叫
inline operator int() const { return T()(counts_[0], counts_[1]); }
再呼叫
class BinaryAnd
{
public:
inline BinaryAnd() {}
inline bool operator()(int a, int b) { return (a > 0) & (b > 0); }
};
推廣到其他布爾運算,則是:
class BinaryOr
{
... (int a, int b) { return (a > 0) | (b > 0); }
};
class BinaryNot
{
...(int a, int b) { return (a > 0) & !(b > 0); }
};
class BinaryXor
{
...(int a, int b) { return (a > 0) ^ (b > 0); }
};
通過模板和多載的方式實作對于不同的布爾運算型別實作不同的before和after取值方法,
計算完before和after的值后,計算value值,value值為1即為入邊,為-1即為出邊,這兩種情況都需要加入outputContainer中,其他情況則不需要,
例如當第一次掃到(2,4),(2,8)邊時,判斷interavl[4,8]:
beforeCount:0,0------>before=false;
afterCount: 0,1------>after=false;
得出value:0
因此不加入,
掃到(3,5),(3,9)邊時,判斷interval[5,8]和[5,9]:
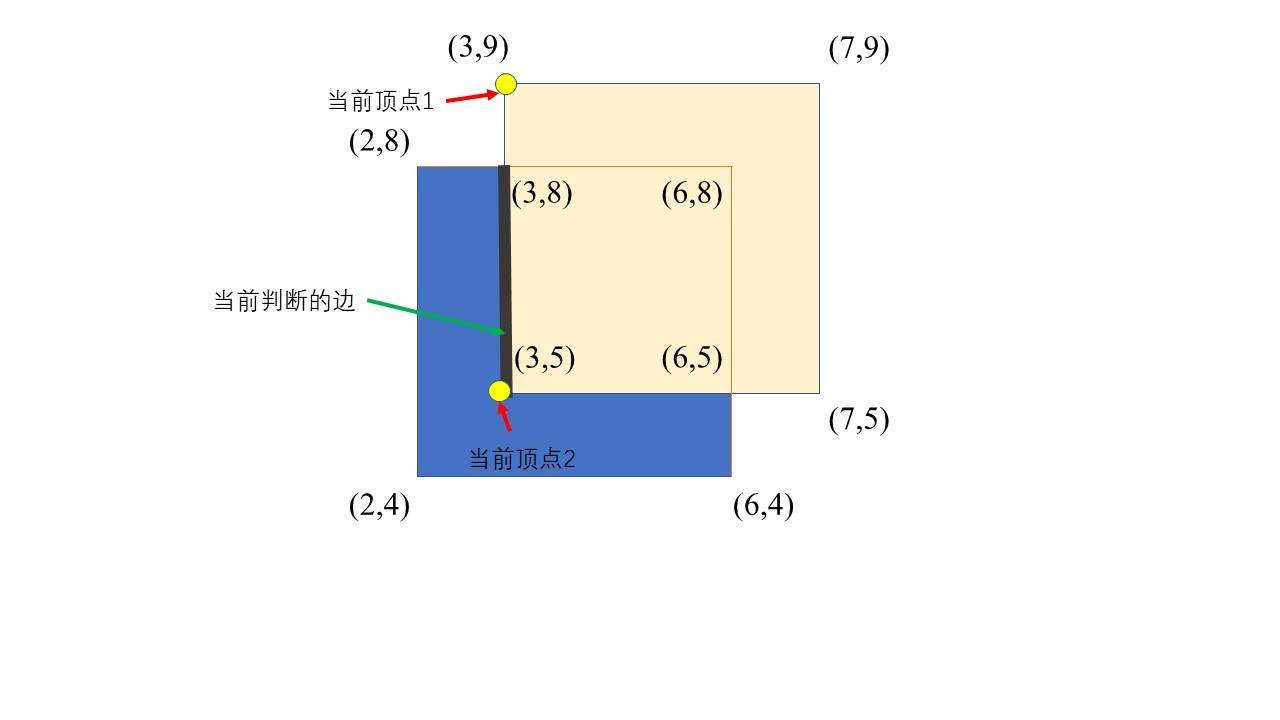
對于[5,8]
beforeCount:0,1------>before=false;
afterCount: 1,1------>after=true;
得出value:1
因此作為入邊加入,
對于[8,9]
beforeCount:0,0------>before=false;
afterCount: 1,0------>after=false;
得出value:0
掃到(4,4),(4,8)邊時,判斷interval[4,5]和[5,8]:
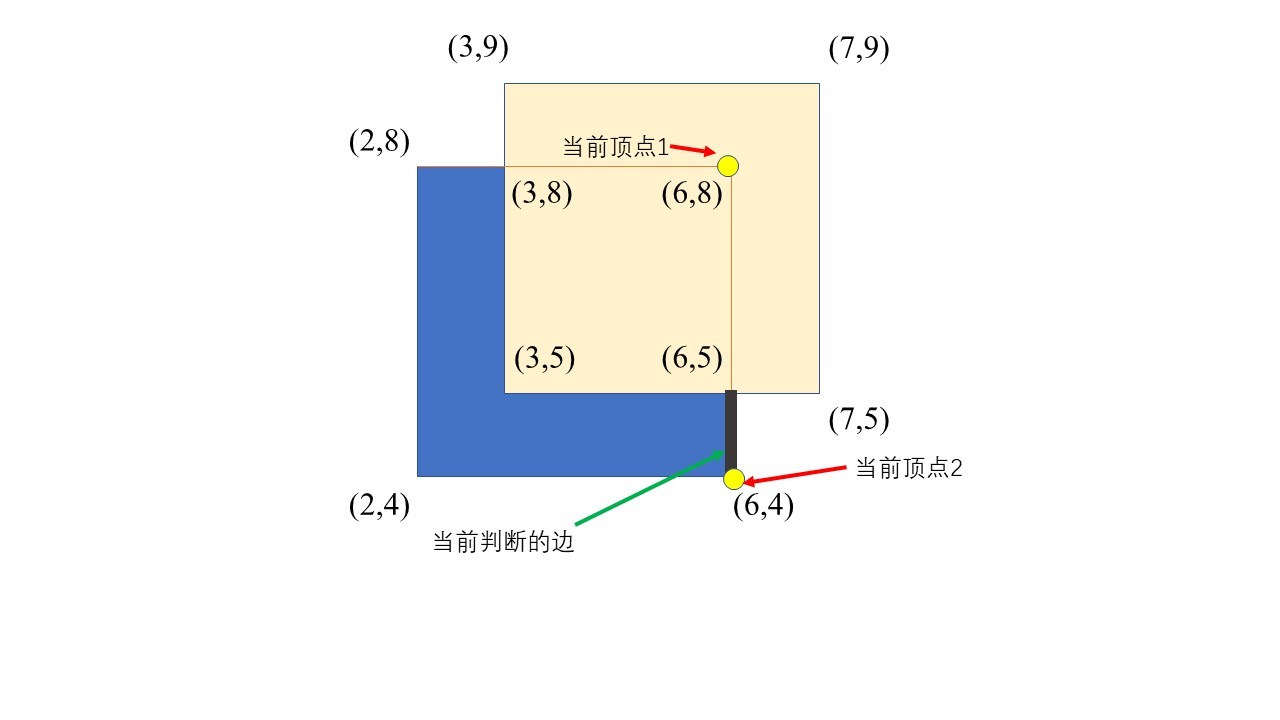
對于[4,5]
beforeCount:0,1------>before=false;
afterCount: 0,0------>after=false;
得出value:0
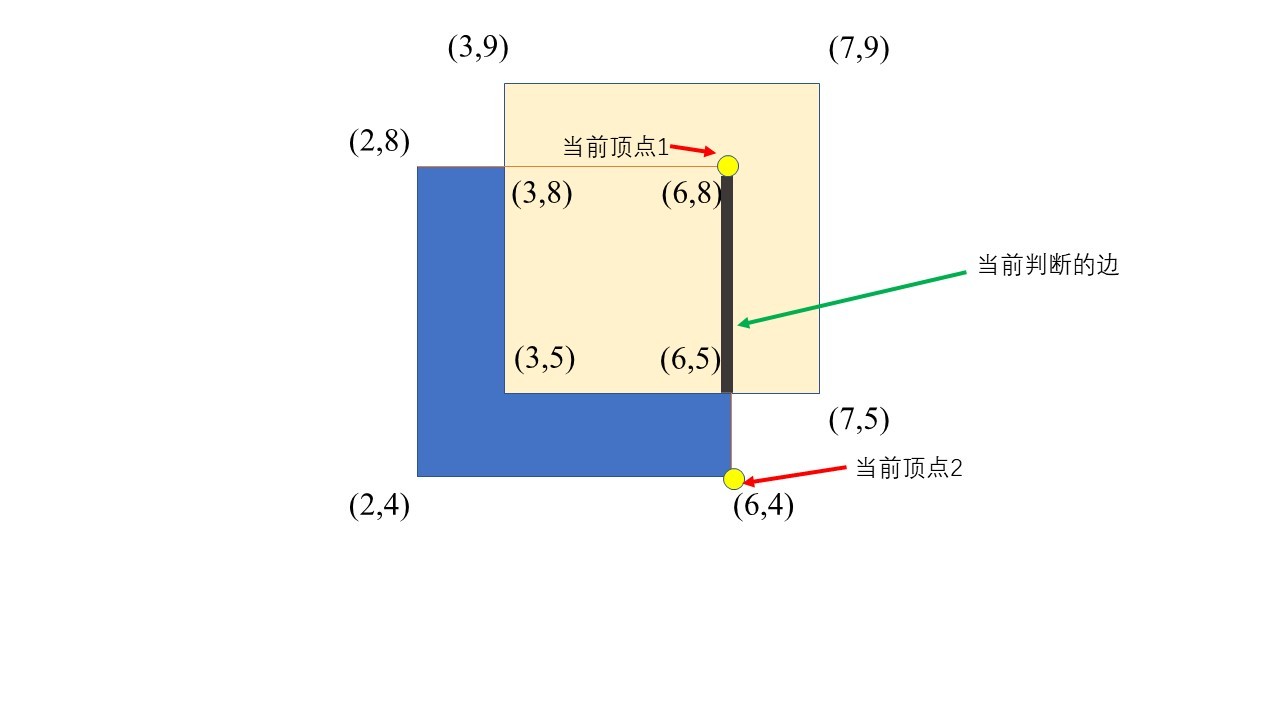
對于[5,8]
beforeCount:1,1------>before=true;
afterCount: 1,0------>after=false;
得出value:-1
作為出邊加入,
掃到(7,5),(7,9)邊時,判斷interval[5,9]:
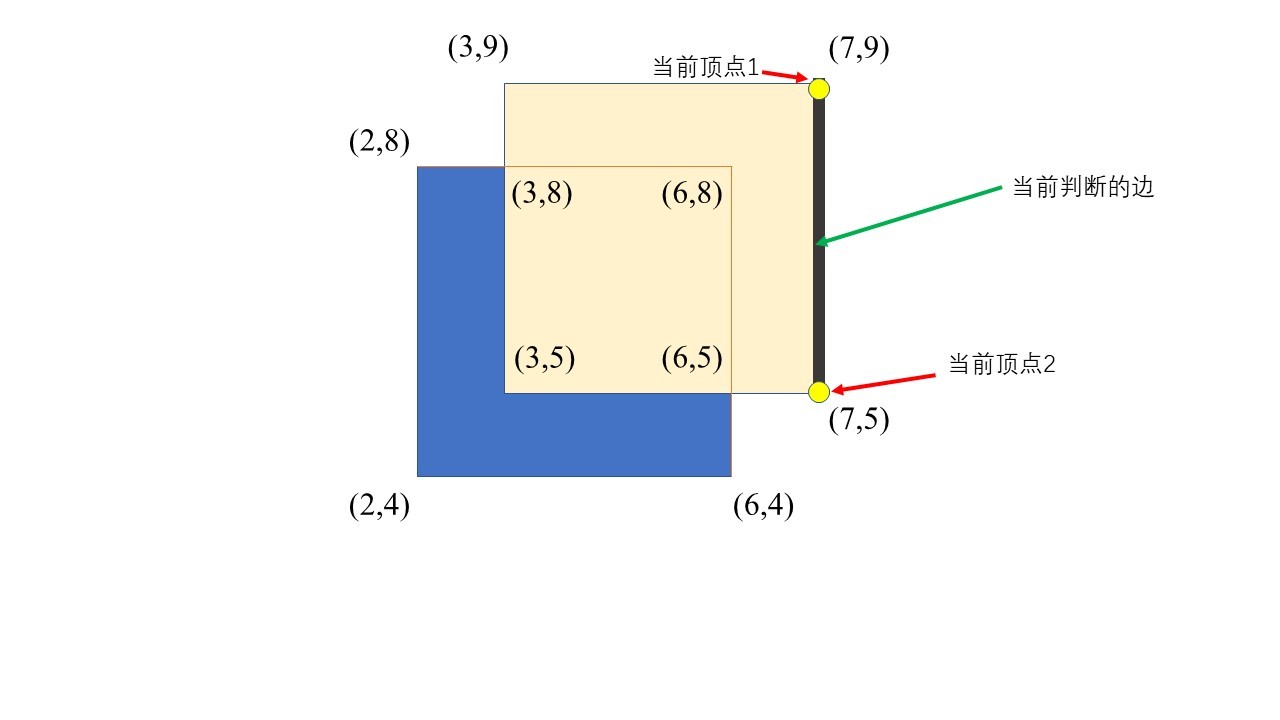
對于[5,9]
beforeCount:1,0------>before=false;
afterCount: 0,0------>after=false;
得出value:0
最后兩個interval判斷通過,需要注意的是,雖然都是[5,8]區間,但后續5,8會分別與prevCoord(x坐標)聯合形成端點坐標,
體現在結果里就是(3,5),(3,8),(6,5),(6,8)四個端點,
參考資料:
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/index.htm
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon2009.pdf
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon_draft03.pdf
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/287553.html
標籤:其他
上一篇:女生25歲結婚算晚嗎