STM32H750獲取OV7670攝像頭影像及上位機解碼(一維碼&二維碼)
1. 目的
針對靜止拍攝影像場景,實作STM32H750對30萬像素OV7670攝像頭進行影像捕獲,并通過串口將資料送到上位機軟體進行解碼,
本文可作為STM32H7及STM32F7系列驅動OV7670攝像頭的代碼參考,通過DCMI的CROP功能,使用者可以從OV7670最大輸出解析度(640×480)中“剪”出更小解析度圖片,
2. 場景引數說明
- 上位機與STM32H750通過USB全速虛擬串口(可用12000000波特率)或UART串口(230400波特率)通訊及接收影像資料,
- STM32H750通過DCMI總線介面與OV7670攝像頭DVP介面連接,通過IIC總線與OV7670 SCCB配置埠連接,并通過GPIO連接控制攝像頭端的Reset和PowerDown管腳,
- STM32H750從OV7670攝像頭獲取640×480解析度的RGB影像,本實驗不針對有SRAM擴展的場景,也不針對直接傳送資料至嵌入式LCD顯示的場景,因此,內部SRAM磁區用于存放一幀資料*(640×480×2 bytes)的空間不足,因此,利用STM32 DCMI CROP功能,獲取多幀影像的不同部分實作拼接效果,并最終將一整幀資料傳送到上位機,
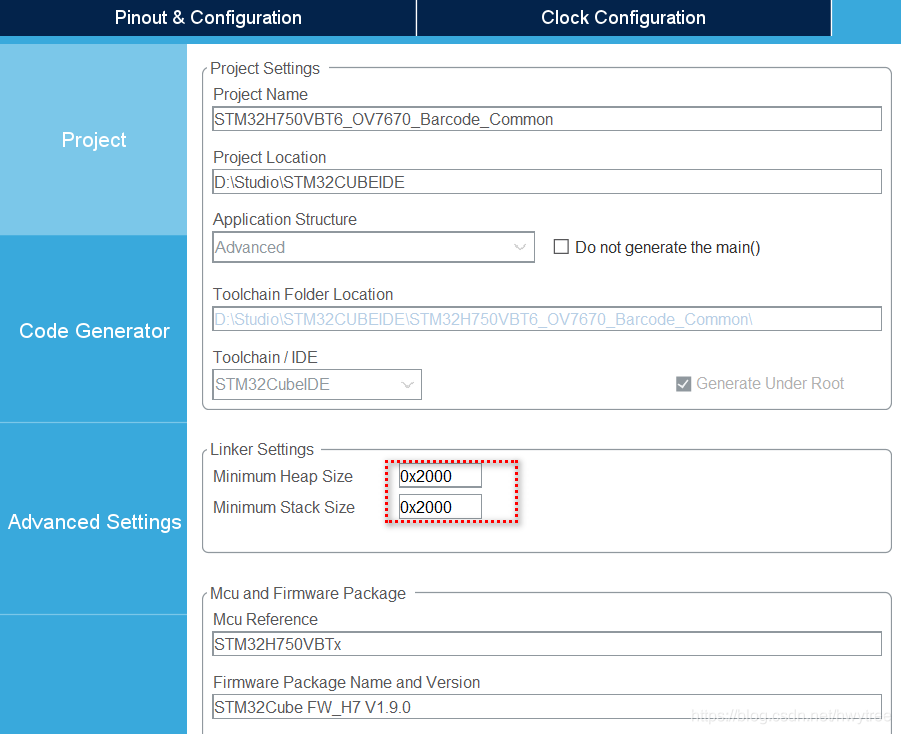
- 開發環境為STM32CUBEIDE(HAL庫)
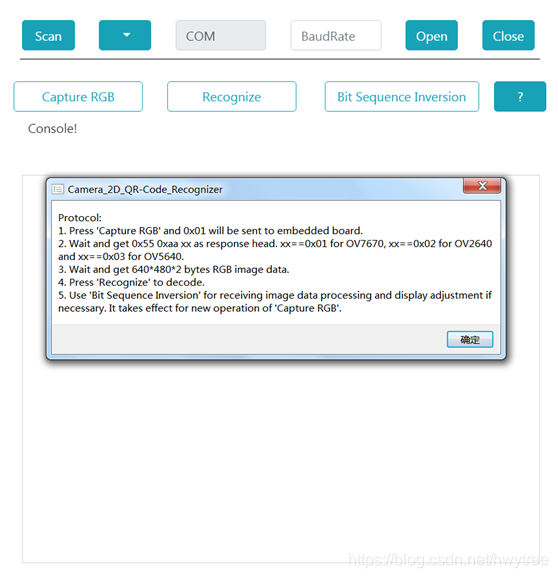
3. 通訊協議
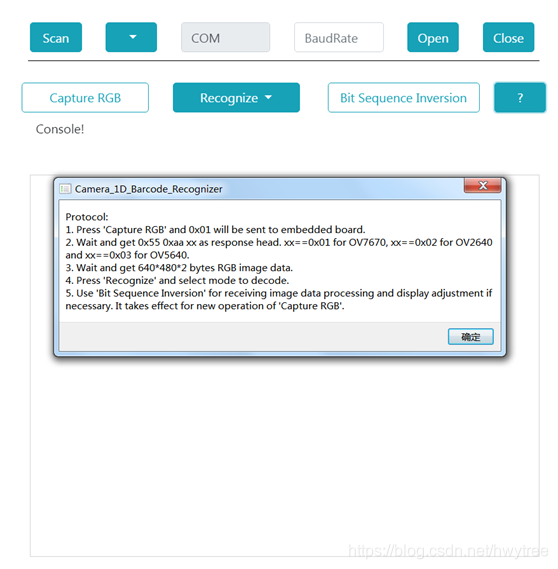
- 上位機通過串口發送0x01指令到STM32, STM32接收指令后,回復0x55 0xaa xx三個位元組,其中0x55 0xaa指示有效的回復,xx為攝像頭型別說明,便于上位機程式進行后續資料的識別處理,當前xx==0x01為OV7670攝像頭,
- STM32從OV7670攝像頭分幀獲取不同部分并發送整幀640×480×2的RGB565資料到上位機,
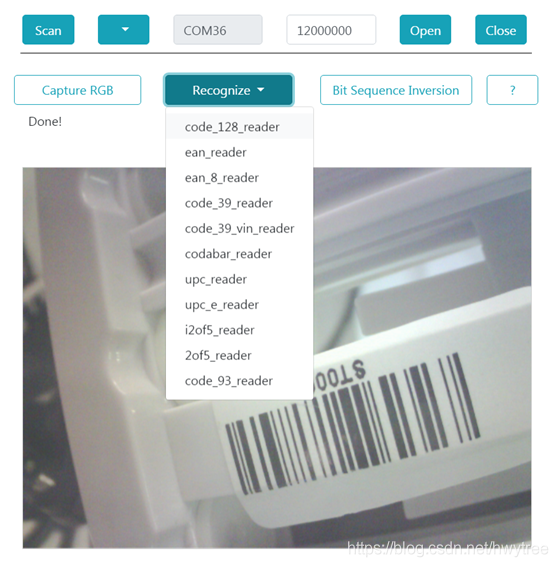
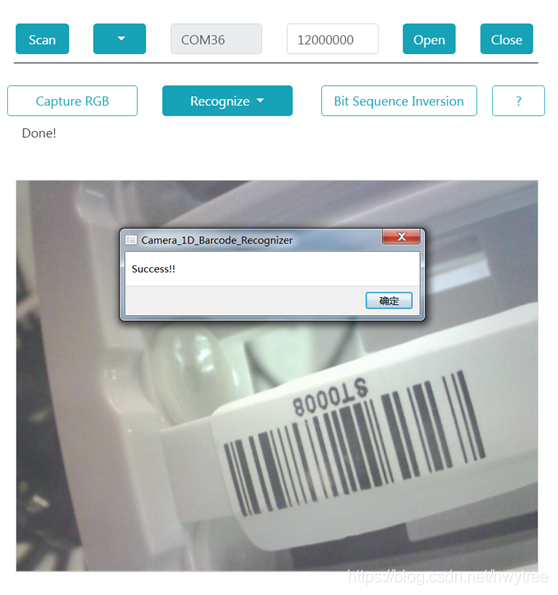
- 上位機進行影像的顯示,并可選進行一維碼和二維碼的識別(基于zbar開源庫),
- 簡化型設計,無校驗方式
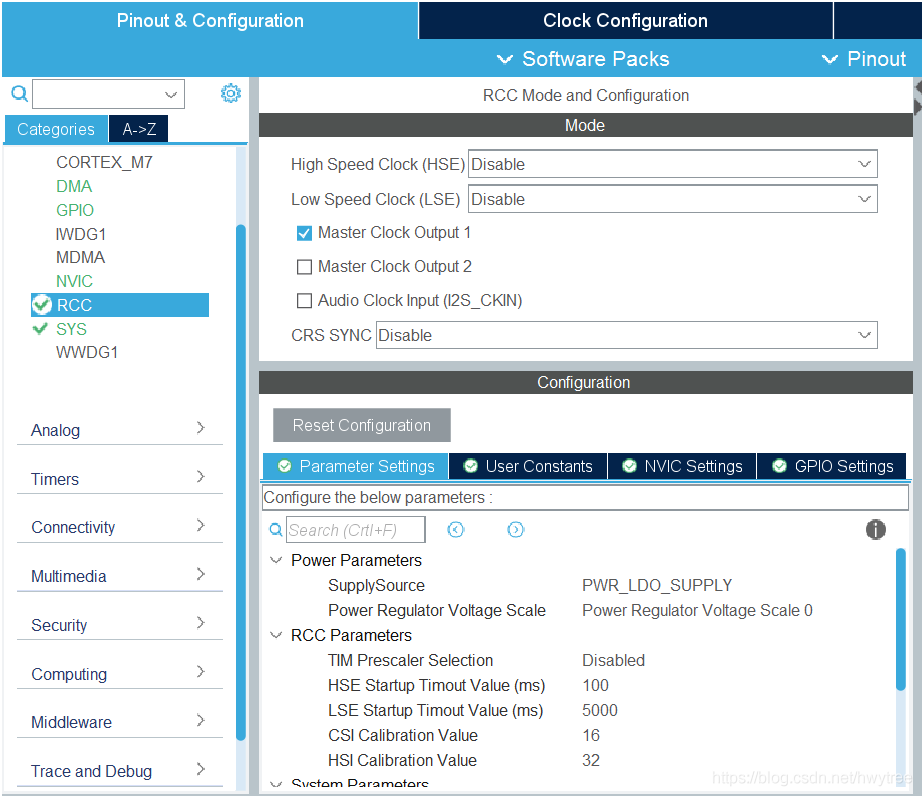
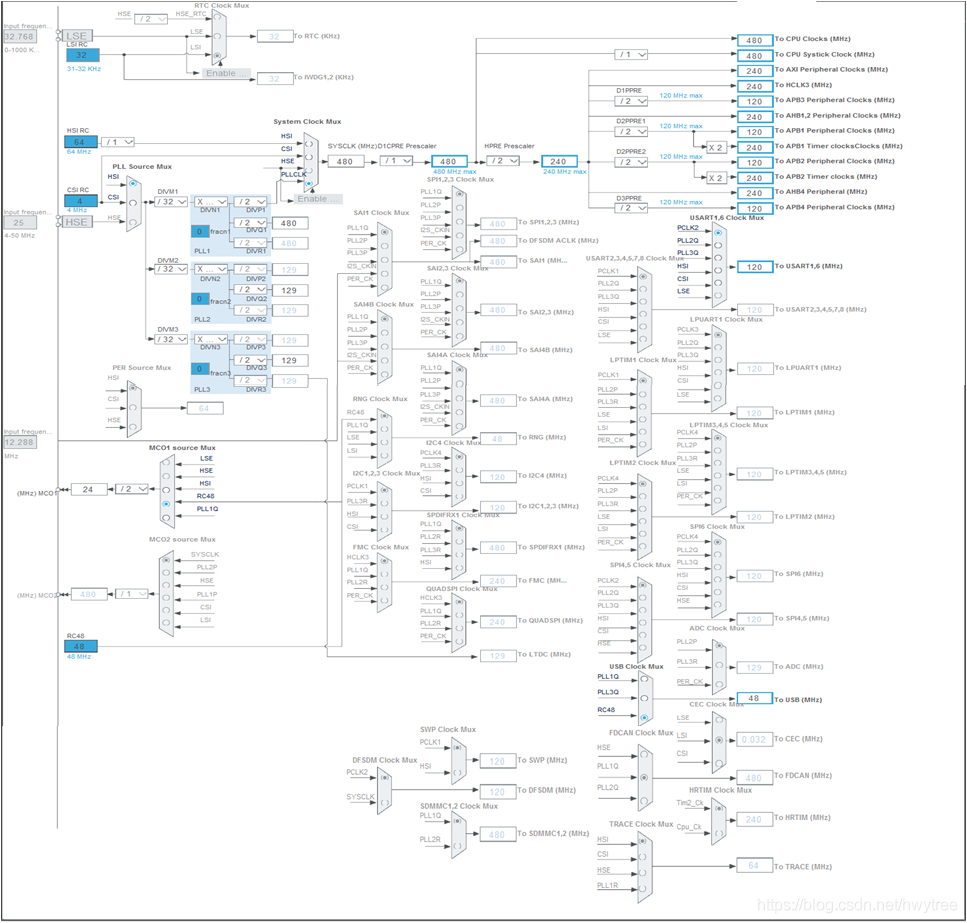
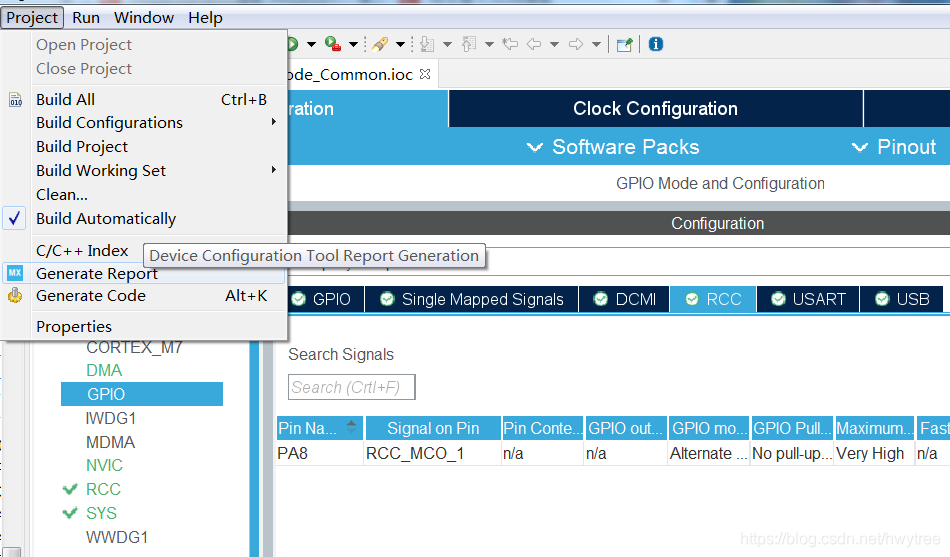
4. STM32H750時鐘配置
對于需要STM32H750輸出24MHz時鐘給OV7670攝像頭模塊的場景,可以用STM32 MCO功能輸出24MHz時鐘,如果攝像頭模塊自帶晶振,不需要STM32提供時鐘,
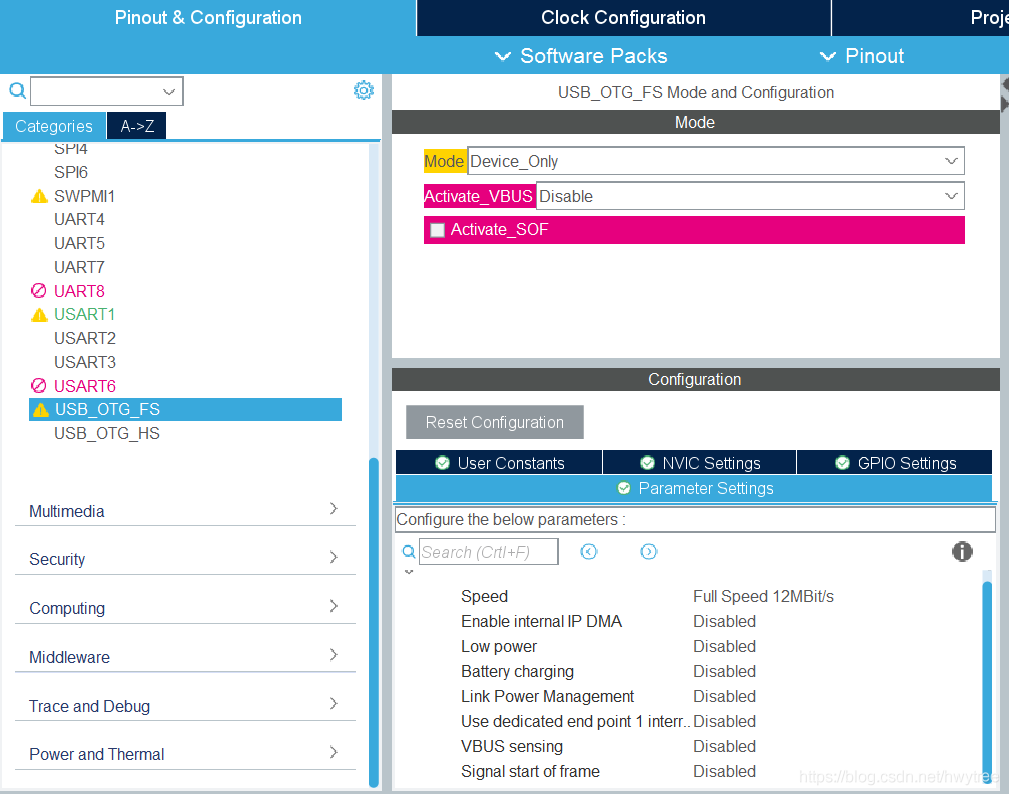
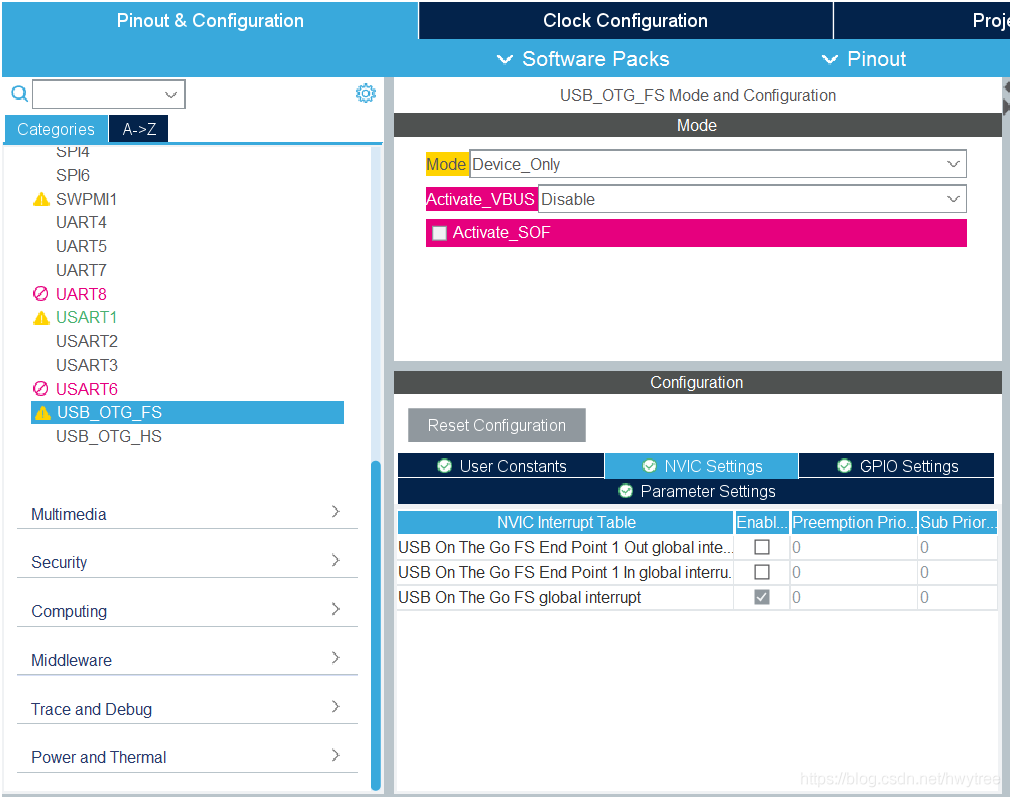
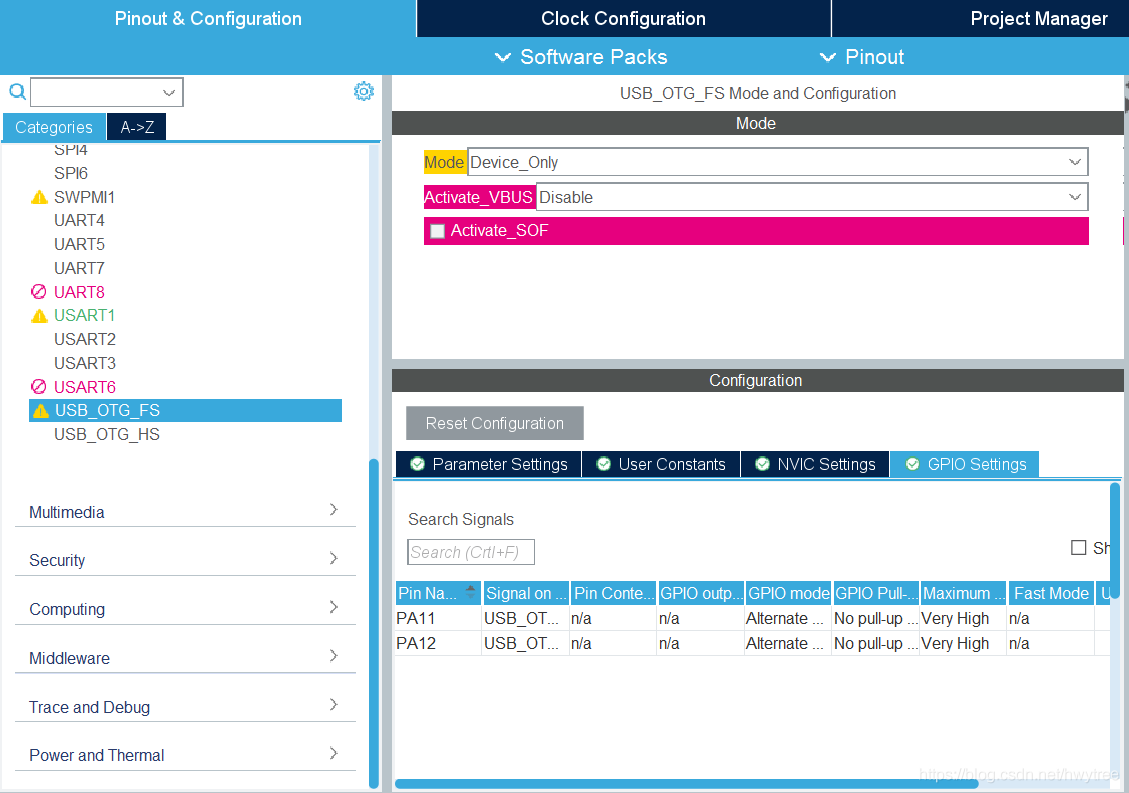
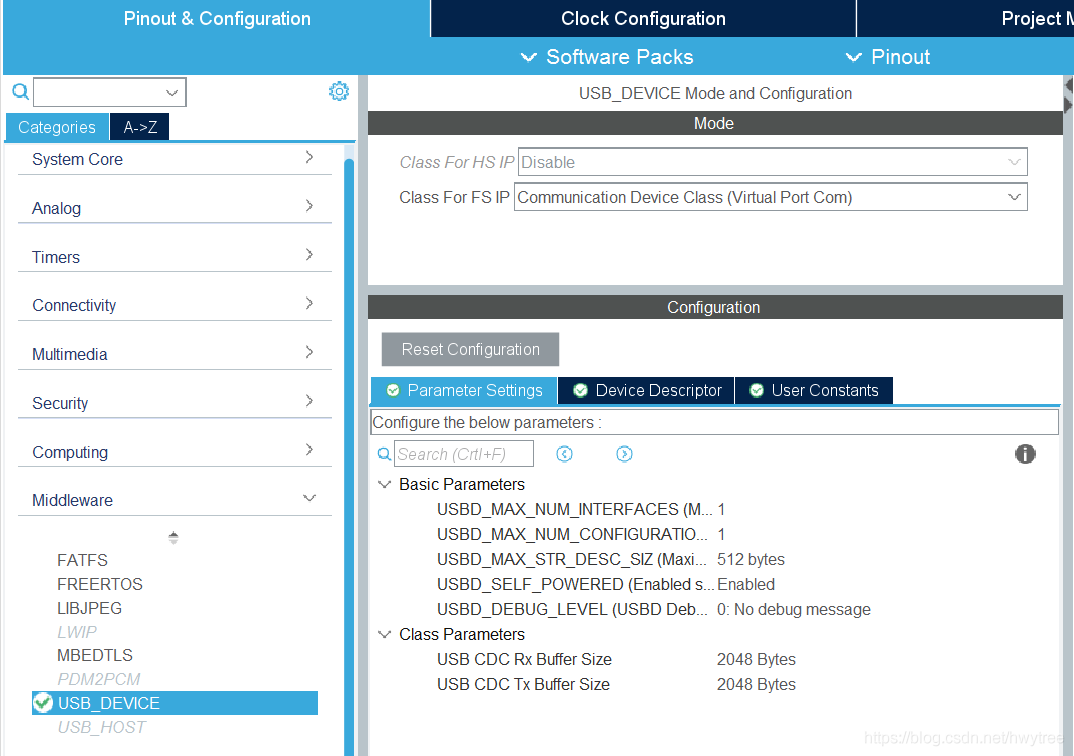
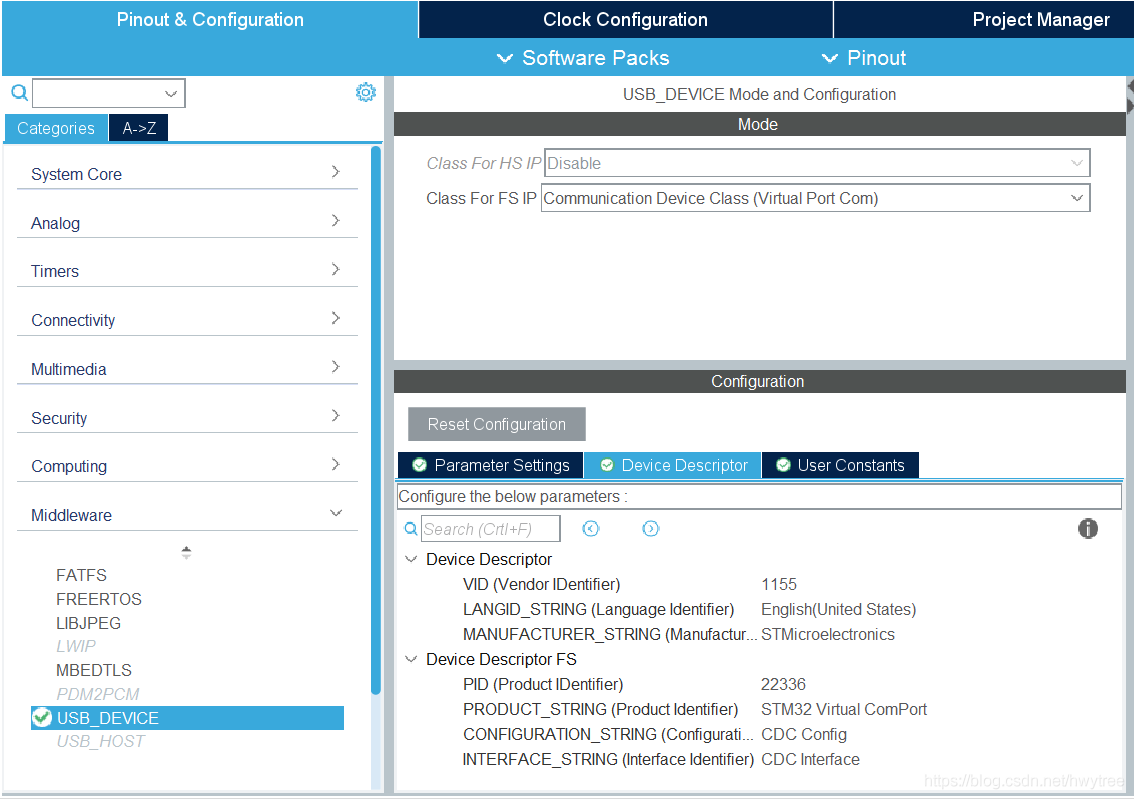
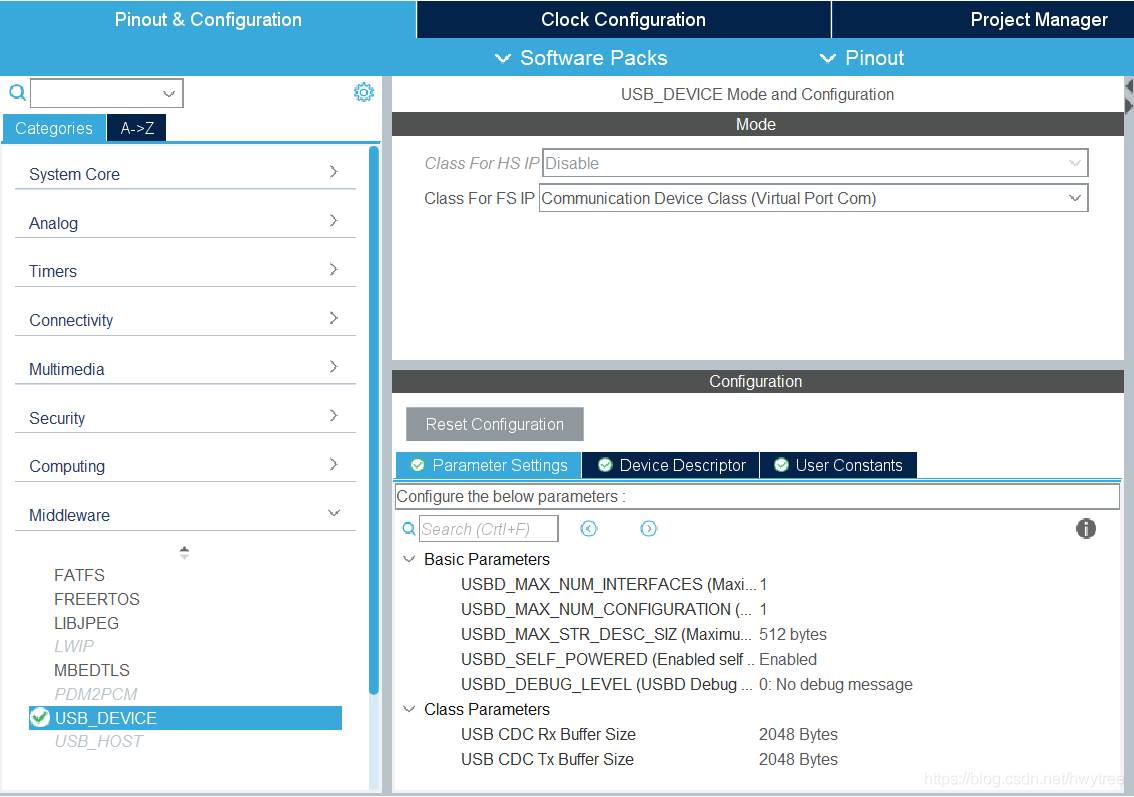
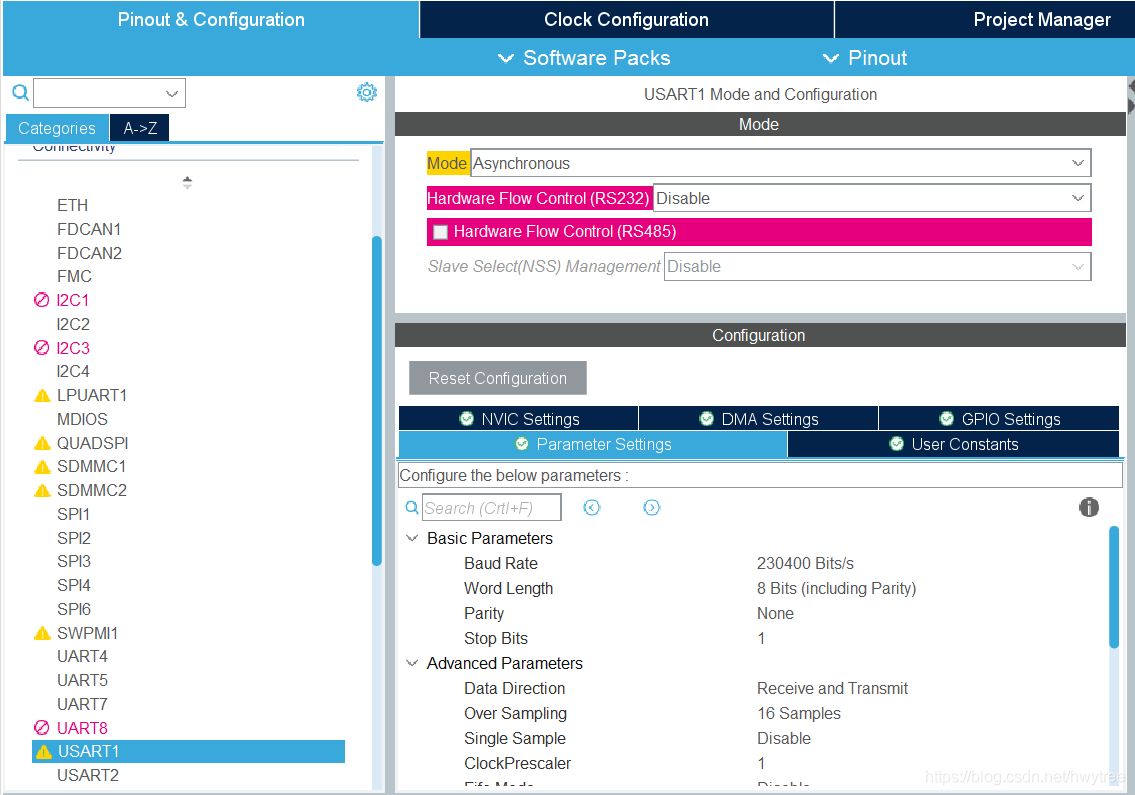
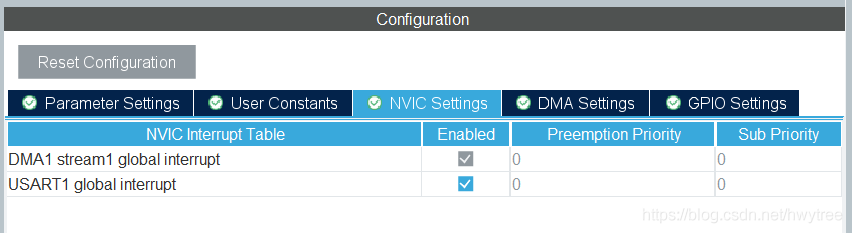
5. STM32H750通訊介面配置
USB虛擬串口:
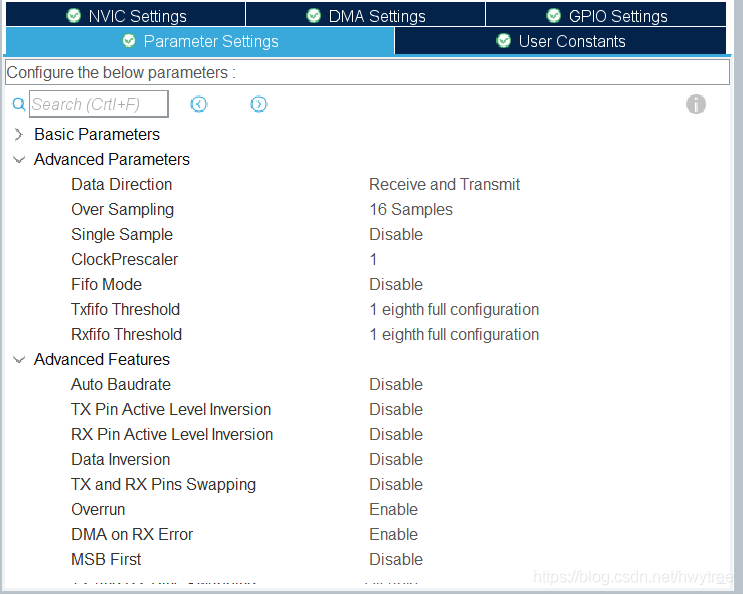
USART1串口配置:
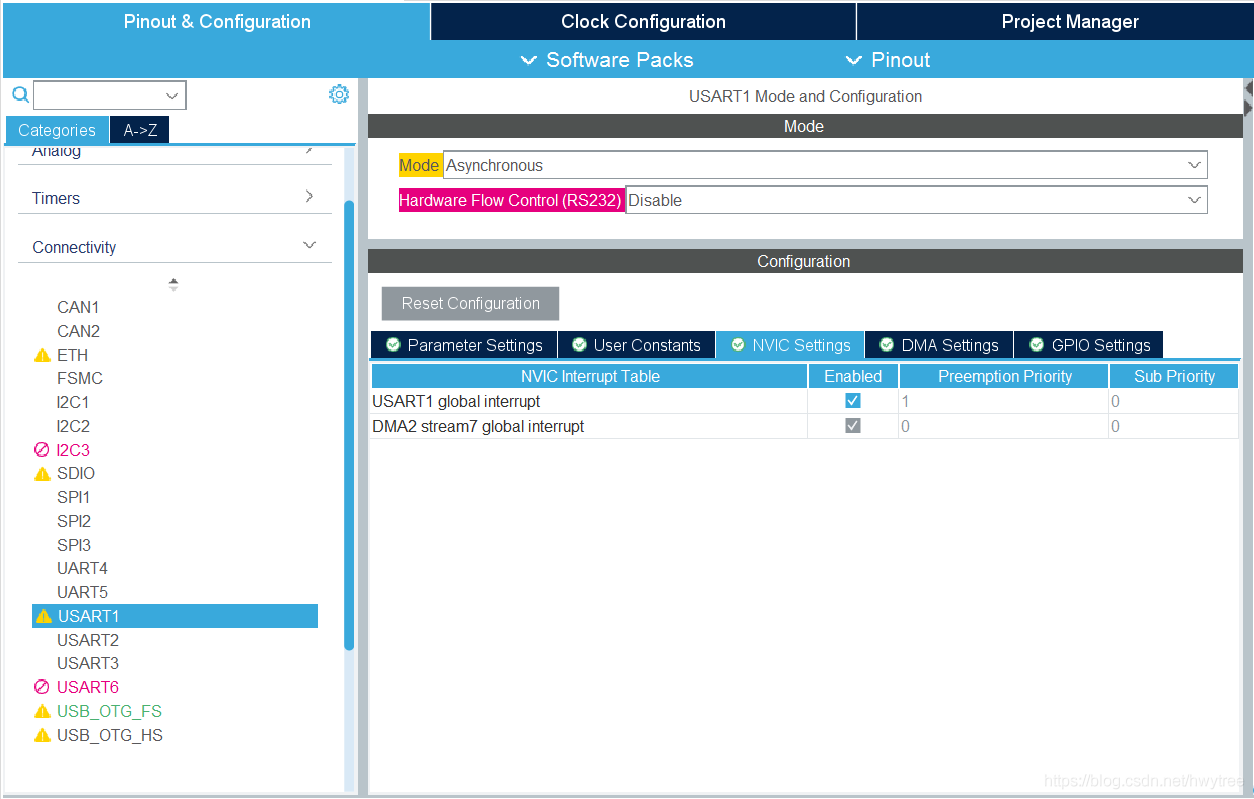
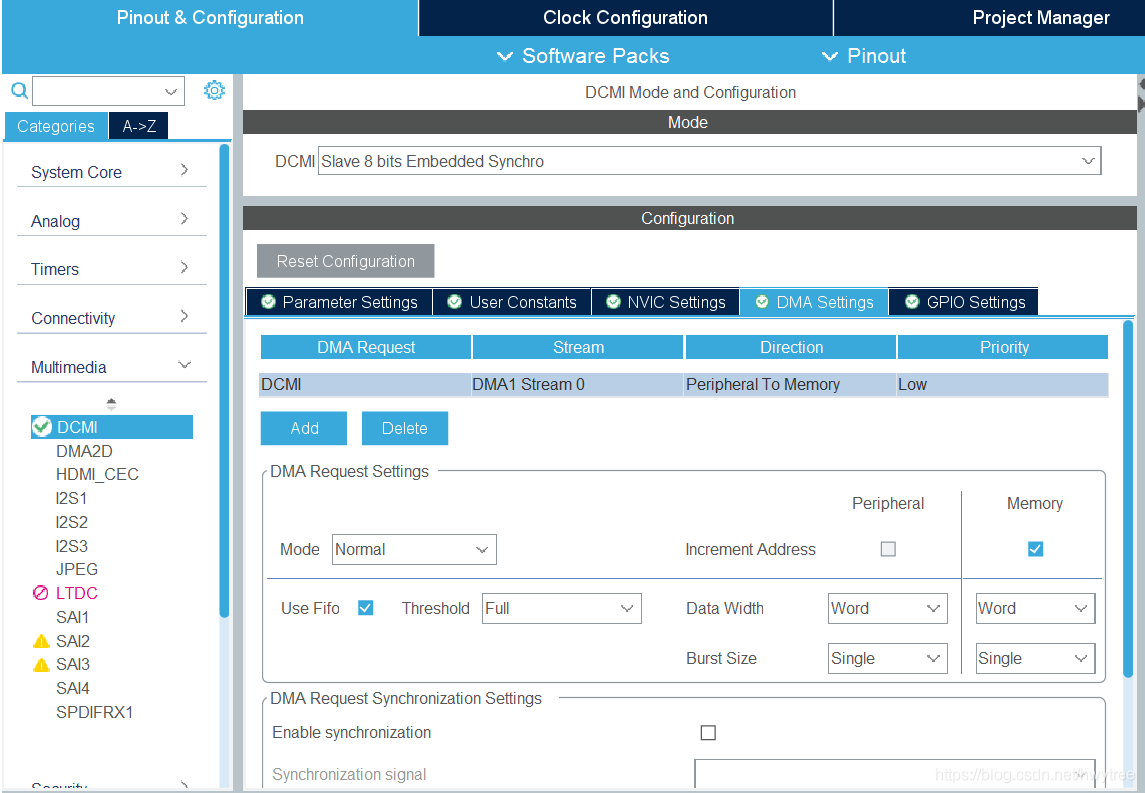
6. 攝像頭介面配置
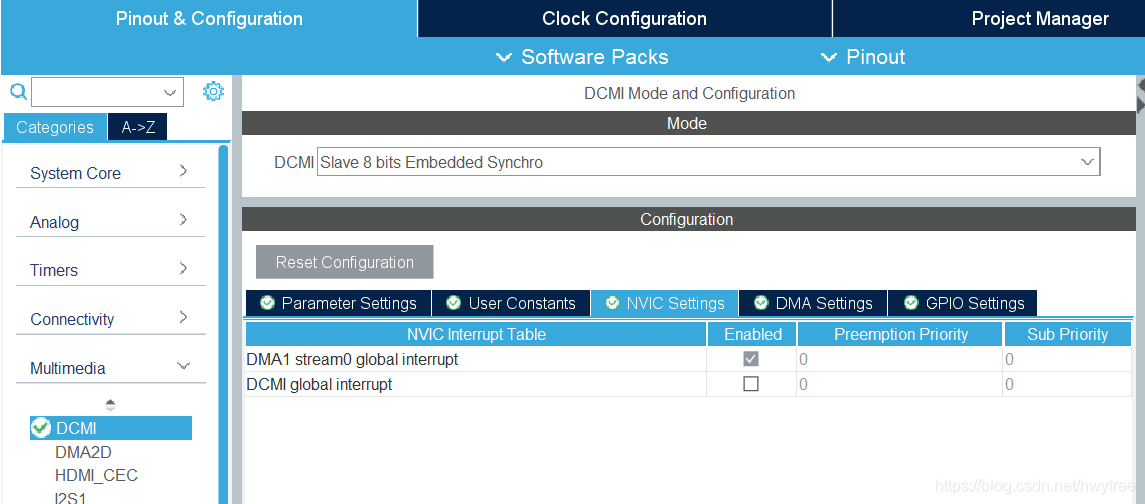
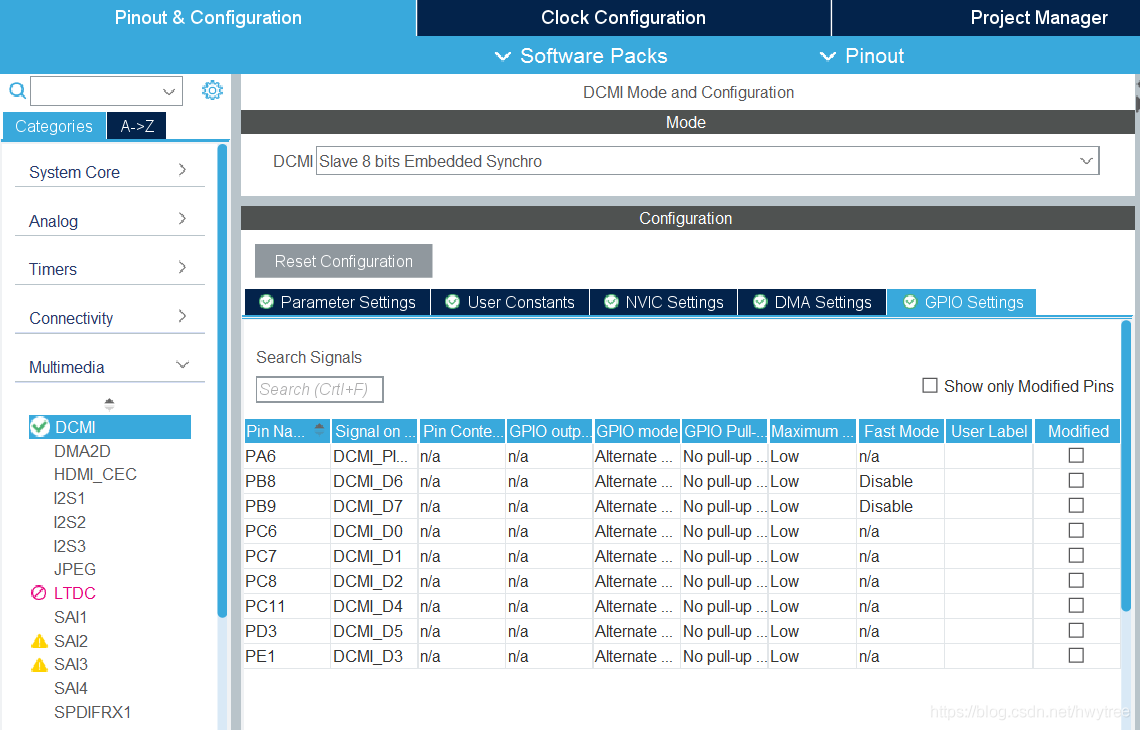
DCMI介面:
STM32H7的HAL庫DCMI介面,從1.8版本升級1.9以上版本后,配置及函式存在問題,因此這里的引數配置(“Parameter Settings”)部分,會在程式里面重新配置,
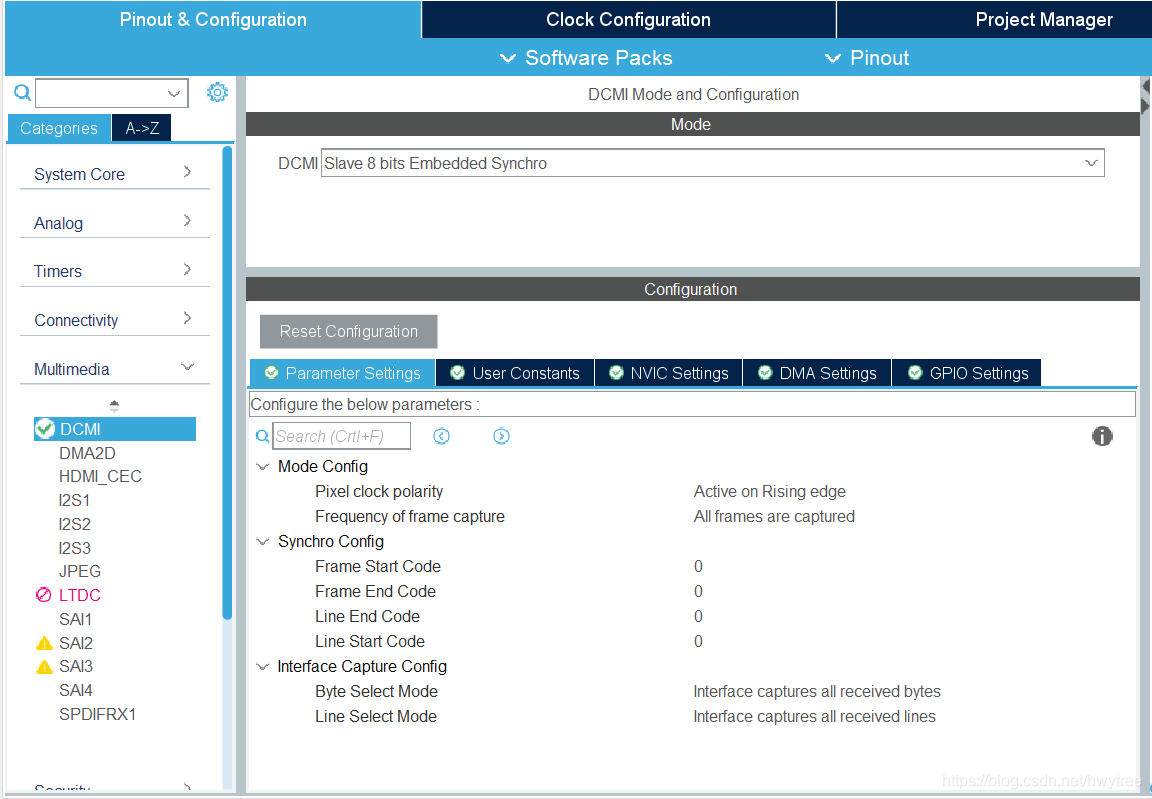
而其它部分正常配置:
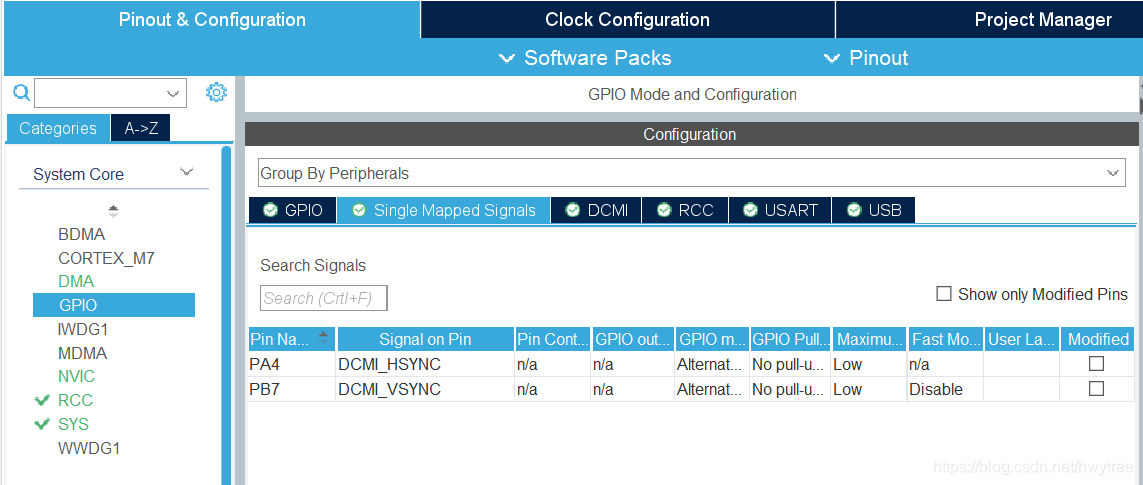
需要單獨對DCMI介面的HSYNC和VSYNC做輸入GPIO的配置:
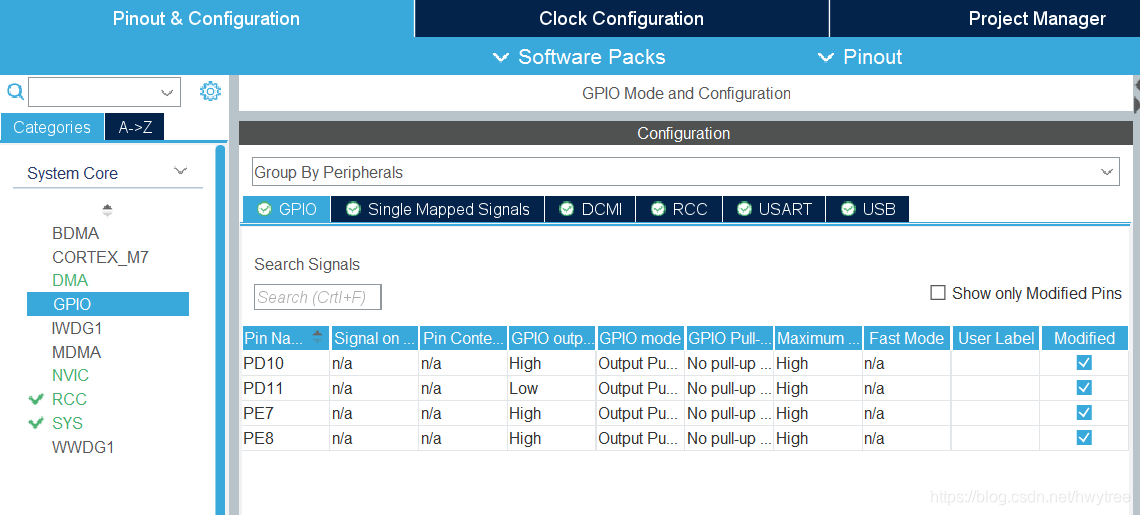
OV7670的SCCB介面時序通過STM32的GPIO管腳模擬,不采用專用的IIC管腳,OV7670的Reset和PowerDown信號,也通過2個GPIO進行管理控制,
保存,并生成初始代碼,再進行功能代碼的撰寫,
7. OV7670介面及配置代碼
撰寫ov7670.h檔案:
#include "stm32h7xx_hal.h"
#ifndef _OV7670_H
#define _OV7670_H
//for not open-drain bus
/*
* SIOC: PE7
* SIOD: PE8
* VSYNC: PB7
* HREF: PA4
* PCLK: PA6
* XCLK: PA8 //24MHz, optional to use
* D7: PB9
* D6: PB8
* D5: PD3
* D4: PC11
* D3: PE1
* D2: PC8
* D1: PC7
* D0: PC6
* RESET: PD10
* PWDN: PD11
*
*
*/
#define SCCB_SCL_L HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_RESET)
#define SCCB_SCL_H HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_SET)
#define SCCB_SDA_L HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_RESET)
#define SCCB_SDA_H HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_SET)
#define SCCB_READ_SDA HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_8)
#define SCCB_ID_W 0X42 //OV7670 ID for Write
#define SCCB_ID_R 0X43 //OV7670 ID for Read
#define OV7670_PWDN HAL_GPIO_WritePin(GPIOD,GPIO_PIN_11,GPIO_PIN_SET)
#define OV7670_PWUP HAL_GPIO_WritePin(GPIOD,GPIO_PIN_11,GPIO_PIN_RESET)
#define OV7670_RST HAL_GPIO_WritePin(GPIOD,GPIO_PIN_10,GPIO_PIN_RESET)
#define OV7670_RUN HAL_GPIO_WritePin(GPIOD,GPIO_PIN_10,GPIO_PIN_SET)
#define OV7670_VSYNC HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)
#define OV7670_HREF HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_4)
#define OV7670_PCLK HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6)
void SCCB_Start(void);
void SCCB_Stop(void);
void SCCB_No_Ack(void);
uint8_t SCCB_WR_Byte(uint8_t data);
uint8_t SCCB_RD_Byte(void);
uint8_t SCCB_WR_Reg(uint8_t reg,uint8_t data);
uint8_t SCCB_RD_Reg(uint8_t reg);
uint32_t tickdelay;
void SCCB_SDA_IN(void);
void SCCB_SDA_OUT(void);
#define ticknumber 12*10
void SCCB_Rst(void);
/***********************************/
void OV7670_640_480_RGB565_Init(void);
void OV7670_Light_Mode(uint8_t mode);
void OV7670_Color_Saturation(uint8_t sat);
void OV7670_Brightness(uint8_t bright);
void OV7670_Contrast(uint8_t contrast);
void OV7670_Special_Effects(uint8_t eft);
#endif
撰寫ov7670.c檔案:
#include <ov7670.h>
//for not open-drain bus
void SCCB_Start(void)
{
SCCB_SDA_H;
SCCB_SCL_H;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SDA_L;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_L;
}
void SCCB_Stop(void)
{
SCCB_SDA_L;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_H;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SDA_H;
tickdelay = ticknumber;while(tickdelay--);
}
void SCCB_No_Ack(void)
{
HAL_Delay(1);
SCCB_SDA_H;
SCCB_SCL_H;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_L;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SDA_L;
tickdelay = ticknumber;while(tickdelay--);
}
uint8_t SCCB_WR_Byte(uint8_t dat)
{
uint8_t j,res;
for(j=0;j<8;j++)
{
if(dat&0x80)SCCB_SDA_H;
else SCCB_SDA_L;
dat<<=1;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_H;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_L;
}
SCCB_SDA_IN();
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_H;
tickdelay = ticknumber;while(tickdelay--);
if(SCCB_READ_SDA)res=1;
else res=0;
SCCB_SCL_L;
SCCB_SDA_OUT();
return res;
}
uint8_t SCCB_RD_Byte(void)
{
uint8_t temp=0,j;
SCCB_SDA_IN();
for(j=8;j>0;j--)
{
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_H;
temp=temp<<1;
if(SCCB_READ_SDA)temp++;
tickdelay = ticknumber;while(tickdelay--);
SCCB_SCL_L;
}
SCCB_SDA_OUT();
return temp;
}
uint8_t SCCB_WR_Reg(uint8_t reg,uint8_t data)
{
uint8_t res=0;
SCCB_Start();
if(SCCB_WR_Byte(SCCB_ID_W))res=1;
tickdelay = ticknumber;while(tickdelay--);
if(SCCB_WR_Byte(reg))res=1;
tickdelay = ticknumber;while(tickdelay--);
if(SCCB_WR_Byte(data))res=1;
SCCB_Stop();
return res;
}
uint8_t SCCB_RD_Reg(uint8_t reg)
{
uint8_t val=0;
SCCB_Start();
SCCB_WR_Byte(SCCB_ID_W);
tickdelay = ticknumber;while(tickdelay--);
SCCB_WR_Byte(reg);
tickdelay = ticknumber;while(tickdelay--);
SCCB_Stop();
tickdelay = ticknumber;while(tickdelay--);
SCCB_Start();
SCCB_WR_Byte(SCCB_ID_R);
tickdelay = ticknumber;while(tickdelay--);
val=SCCB_RD_Byte();
SCCB_No_Ack();
SCCB_Stop();
return val;
}
void SCCB_SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
}
void SCCB_SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
}
void SCCB_Rst(void)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_11,GPIO_PIN_RESET) ;
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_10,GPIO_PIN_RESET) ;
HAL_Delay(5);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_10,GPIO_PIN_SET) ;
HAL_Delay(5);
}
//--------------OV7670 Functions--------------//
void OV7670_640_480_RGB565_Init(void)
{
SCCB_WR_Reg(0x11, 0x02); // 30fps
SCCB_WR_Reg(0x6b, 0x8a); // pclk*6
SCCB_WR_Reg(0x3A, 0x04);
SCCB_WR_Reg(0x12, 0x04); //RGB
SCCB_WR_Reg(0x17, 0x13);
SCCB_WR_Reg(0x18, 0x01);
SCCB_WR_Reg(0x32, 0xB6);
SCCB_WR_Reg(0x19, 0x02);
SCCB_WR_Reg(0x1A, 0x7A);
SCCB_WR_Reg(0x03, 0x0F);
SCCB_WR_Reg(0x0C, 0x00);
SCCB_WR_Reg(0x3E, 0x00);
SCCB_WR_Reg(0x70, 0x3A);
SCCB_WR_Reg(0x71, 0x35);
SCCB_WR_Reg(0x72, 0x11);
SCCB_WR_Reg(0x73, 0xF0);
SCCB_WR_Reg(0xA2, 0x3B);
SCCB_WR_Reg(0x1E, 0x0F);
SCCB_WR_Reg(0x7a, 0x20);
SCCB_WR_Reg(0x7b, 0x03);
SCCB_WR_Reg(0x7c, 0x0a);
SCCB_WR_Reg(0x7d, 0x1a);
SCCB_WR_Reg(0x7e, 0x3f);
SCCB_WR_Reg(0x7f, 0x4e);
SCCB_WR_Reg(0x80, 0x5b);
SCCB_WR_Reg(0x81, 0x68);
SCCB_WR_Reg(0x82, 0x75);
SCCB_WR_Reg(0x83, 0x7f);
SCCB_WR_Reg(0x84, 0x89);
SCCB_WR_Reg(0x85, 0x9a);
SCCB_WR_Reg(0x86, 0xa6);
SCCB_WR_Reg(0x87, 0xbd);
SCCB_WR_Reg(0x88, 0xd3);
SCCB_WR_Reg(0x89, 0xe8);
SCCB_WR_Reg(0x13, 0xE0);
SCCB_WR_Reg(0x00, 0x00);
SCCB_WR_Reg(0x10, 0x00);
SCCB_WR_Reg(0x0D, 0x50);
SCCB_WR_Reg(0x42, 0x40);
SCCB_WR_Reg(0x14, 0x28);
SCCB_WR_Reg(0xA5, 0x03);
SCCB_WR_Reg(0xAB, 0x03);
SCCB_WR_Reg(0x24, 0x50);
SCCB_WR_Reg(0x25, 0x43);
SCCB_WR_Reg(0x26, 0xa3);
SCCB_WR_Reg(0x9F, 0x78);
SCCB_WR_Reg(0xA0, 0x68);
SCCB_WR_Reg(0xA1, 0x03);
SCCB_WR_Reg(0xA6, 0xd2);
SCCB_WR_Reg(0xA7, 0xd2);
SCCB_WR_Reg(0xA8, 0xF0);
SCCB_WR_Reg(0xA9, 0x80);
SCCB_WR_Reg(0xAA, 0x14);
SCCB_WR_Reg(0x13, 0xE5);
SCCB_WR_Reg(0x0E, 0x61);
SCCB_WR_Reg(0x0F, 0x4B); // Flip (bit4) & Mirror (bit5)
SCCB_WR_Reg(0x16, 0x02);
SCCB_WR_Reg(0x21, 0x02);
SCCB_WR_Reg(0x22, 0x91);
SCCB_WR_Reg(0x29, 0x07);
SCCB_WR_Reg(0x33, 0x0B);
SCCB_WR_Reg(0x35, 0x0B);
SCCB_WR_Reg(0x37, 0x1D);
SCCB_WR_Reg(0x38, 0x71);
SCCB_WR_Reg(0x39, 0x2A);
SCCB_WR_Reg(0x3C, 0x78);
SCCB_WR_Reg(0x4D, 0x40);
SCCB_WR_Reg(0x4E, 0x20);
SCCB_WR_Reg(0x69, 0x00);
SCCB_WR_Reg(0x74, 0x10);
SCCB_WR_Reg(0x8D, 0x4F);
SCCB_WR_Reg(0x8E, 0x00);
SCCB_WR_Reg(0x8F, 0x00);
SCCB_WR_Reg(0x90, 0x00);
SCCB_WR_Reg(0x91, 0x00);
SCCB_WR_Reg(0x96, 0x00);
SCCB_WR_Reg(0x9A, 0x80);
SCCB_WR_Reg(0xB0, 0x84);
SCCB_WR_Reg(0xB1, 0x0C);
SCCB_WR_Reg(0xB2, 0x0E);
SCCB_WR_Reg(0xB3, 0x82);
SCCB_WR_Reg(0xB8, 0x0A);
SCCB_WR_Reg(0x43, 0x02);
SCCB_WR_Reg(0x44, 0xf2);
SCCB_WR_Reg(0x45, 0x46);
SCCB_WR_Reg(0x46, 0x63);
SCCB_WR_Reg(0x47, 0x32);
SCCB_WR_Reg(0x48, 0x3b);
SCCB_WR_Reg(0x59, 0x92);
SCCB_WR_Reg(0x5a, 0x9b);
SCCB_WR_Reg(0x5b, 0xa5);
SCCB_WR_Reg(0x5c, 0x7a);
SCCB_WR_Reg(0x5d, 0x4a);
SCCB_WR_Reg(0x5e, 0x0a);
SCCB_WR_Reg(0x6c, 0x0a);
SCCB_WR_Reg(0x6d, 0x55);
SCCB_WR_Reg(0x6e, 0x11);
SCCB_WR_Reg(0x6f, 0x9e);
SCCB_WR_Reg(0x6A, 0x40);
SCCB_WR_Reg(0x01, 0x40);
SCCB_WR_Reg(0x02, 0x40);
SCCB_WR_Reg(0x13, 0xf7);
SCCB_WR_Reg(0x4f, 0x9c);
SCCB_WR_Reg(0x50, 0x99);
SCCB_WR_Reg(0x51, 0x02);
SCCB_WR_Reg(0x52, 0x29);
SCCB_WR_Reg(0x53, 0x8b);
SCCB_WR_Reg(0x54, 0xb5);
SCCB_WR_Reg(0x58, 0x1e);
SCCB_WR_Reg(0x62, 0x08);
SCCB_WR_Reg(0x63, 0x10);
SCCB_WR_Reg(0x64, 0x04);
SCCB_WR_Reg(0x65, 0x00);
SCCB_WR_Reg(0x66, 0x05);
SCCB_WR_Reg(0x94, 0x04);
SCCB_WR_Reg(0x95, 0x06);
SCCB_WR_Reg(0x41, 0x08);
SCCB_WR_Reg(0x3F, 0x00);
SCCB_WR_Reg(0x75, 0x44);
SCCB_WR_Reg(0x76, 0xe1);
SCCB_WR_Reg(0x4C, 0x00);
SCCB_WR_Reg(0x77, 0x01);
SCCB_WR_Reg(0x3D, 0xC0);
SCCB_WR_Reg(0x4B, 0x09);
SCCB_WR_Reg(0xC9, 0x60);
SCCB_WR_Reg(0x41, 0x38);
SCCB_WR_Reg(0x56, 0x40);
SCCB_WR_Reg(0x34, 0x11);
SCCB_WR_Reg(0x3b, 0x02);
SCCB_WR_Reg(0xa4, 0x88); //disable night mode
SCCB_WR_Reg(0x92, 0x00);
SCCB_WR_Reg(0x96, 0x00);
SCCB_WR_Reg(0x97, 0x30);
SCCB_WR_Reg(0x98, 0x20);
SCCB_WR_Reg(0x99, 0x20);
SCCB_WR_Reg(0x9A, 0x84);
SCCB_WR_Reg(0x9B, 0x29);
SCCB_WR_Reg(0x9C, 0x03);
SCCB_WR_Reg(0x9D, 0x99);
SCCB_WR_Reg(0x9E, 0x7F);
SCCB_WR_Reg(0x78, 0x00);
SCCB_WR_Reg(0x79, 0x01);
SCCB_WR_Reg(0xc8, 0xf0);
SCCB_WR_Reg(0x79, 0x0f);
SCCB_WR_Reg(0xc8, 0x00);
SCCB_WR_Reg(0x79, 0x10);
SCCB_WR_Reg(0xc8, 0x7e);
SCCB_WR_Reg(0x79, 0x0a);
SCCB_WR_Reg(0xc8, 0x80);
SCCB_WR_Reg(0x79, 0x0b);
SCCB_WR_Reg(0xc8, 0x01);
SCCB_WR_Reg(0x79, 0x0c);
SCCB_WR_Reg(0xc8, 0x0f);
SCCB_WR_Reg(0x79, 0x0d);
SCCB_WR_Reg(0xc8, 0x20);
SCCB_WR_Reg(0x79, 0x09);
SCCB_WR_Reg(0xc8, 0x80);
SCCB_WR_Reg(0x79, 0x02);
SCCB_WR_Reg(0xc8, 0xc0);
SCCB_WR_Reg(0x79, 0x03);
SCCB_WR_Reg(0xc8, 0x40);
SCCB_WR_Reg(0x79, 0x05);
SCCB_WR_Reg(0xc8, 0x30);
SCCB_WR_Reg(0x79, 0x26);
SCCB_WR_Reg(0x3b, 0x02);
SCCB_WR_Reg(0x43, 0x02);
SCCB_WR_Reg(0x44, 0xf2);
SCCB_WR_Reg(0x30, 0x4F);
SCCB_WR_Reg(0x09, 0x00);
SCCB_WR_Reg(0x15, 0x00);
SCCB_WR_Reg(0x40, 0xd0);
SCCB_WR_Reg(0x8c, 0x00);
}
void OV7670_config_window(uint16_t startx,uint16_t starty,uint16_t width, uint16_t height)
{
uint16_t endx=(startx+width*2)%784;
uint16_t endy=(starty+height*2);
uint16_t x_reg, y_reg;
uint16_t temp;
SCCB_WR_Reg(0x12, 0x14);
x_reg = SCCB_RD_Reg(0x32);
x_reg &= 0xC0;
y_reg = SCCB_RD_Reg(0x03);
y_reg &= 0xF0;
temp = x_reg|((endx&0x7)<<3)|(startx&0x7);
SCCB_WR_Reg(0x32, temp );
temp = (startx&0x7F8)>>3;
SCCB_WR_Reg(0x17, temp );
temp = (endx&0x7F8)>>3;
SCCB_WR_Reg(0x18, temp );
temp = y_reg|((endy&0x3)<<2)|(starty&0x3);
SCCB_WR_Reg(0x03, temp );
temp = (starty&0x3FC)>>2;
SCCB_WR_Reg(0x19, temp );
temp = (endy&0x3FC)>>2;
SCCB_WR_Reg(0x1A, temp );
}
//Light_Mode
//0:auto
//1:sunny
//2,cloudy
//3,office
//4,home
void OV7670_Light_Mode(uint8_t mode)
{
uint8_t reg13val=0XE7;
uint8_t reg01val=0;
uint8_t reg02val=0;
switch(mode)
{
case 1://sunny
reg13val=0XE5;
reg01val=0X5A;
reg02val=0X5C;
break;
case 2://cloudy
reg13val=0XE5;
reg01val=0X58;
reg02val=0X60;
break;
case 3://office
reg13val=0XE5;
reg01val=0X84;
reg02val=0X4c;
break;
case 4://home
reg13val=0XE5;
reg01val=0X96;
reg02val=0X40;
break;
}
SCCB_WR_Reg(0X13,reg13val);
SCCB_WR_Reg(0X01,reg01val);
SCCB_WR_Reg(0X02,reg02val);
}
//Color_Saturation
//0:-2
//1:-1
//2,0
//3,1
//4,2
void OV7670_Color_Saturation(uint8_t sat)
{
uint8_t reg4f5054val=0X80;
uint8_t reg52val=0X22;
uint8_t reg53val=0X5E;
switch(sat)
{
case 0://-2
reg4f5054val=0X40;
reg52val=0X11;
reg53val=0X2F;
break;
case 1://-1
reg4f5054val=0X66;
reg52val=0X1B;
reg53val=0X4B;
break;
case 3://1
reg4f5054val=0X99;
reg52val=0X28;
reg53val=0X71;
break;
case 4://2
reg4f5054val=0XC0;
reg52val=0X33;
reg53val=0X8D;
break;
}
SCCB_WR_Reg(0X4F,reg4f5054val);
SCCB_WR_Reg(0X50,reg4f5054val);
SCCB_WR_Reg(0X51,0X00);
SCCB_WR_Reg(0X52,reg52val);
SCCB_WR_Reg(0X53,reg53val);
SCCB_WR_Reg(0X54,reg4f5054val);
SCCB_WR_Reg(0X58,0X9E);
}
//Brightness
//0:-2
//1:-1
//2,0
//3,1
//4,2
void OV7670_Brightness(uint8_t bright)
{
uint8_t reg55val=0X00;
switch(bright)
{
case 0://-2
reg55val=0XB0;
break;
case 1://-1
reg55val=0X98;
break;
case 3://1
reg55val=0X18;
break;
case 4://2
reg55val=0X30;
break;
}
SCCB_WR_Reg(0X55,reg55val);
}
//Contrast
//0:-2
//1:-1
//2,0
//3,1
//4,2
void OV7670_Contrast(uint8_t contrast)
{
uint8_t reg56val=0X40;
switch(contrast)
{
case 0://-2
reg56val=0X30;
break;
case 1://-1
reg56val=0X38;
break;
case 3://1
reg56val=0X50;
break;
case 4://2
reg56val=0X60;
break;
}
SCCB_WR_Reg(0X56,reg56val);
}
//Special_Effects
//0:normal
//1,negative
//2,black-white
//3,red
//4,green
//5,blue
//6,classic
void OV7670_Special_Effects(uint8_t eft)
{
uint8_t reg3aval=0X04;
uint8_t reg67val=0XC0;
uint8_t reg68val=0X80;
switch(eft)
{
case 1:
reg3aval=0X24;
reg67val=0X80;
reg68val=0X80;
break;
case 2:
reg3aval=0X14;
reg67val=0X80;
reg68val=0X80;
break;
case 3:
reg3aval=0X14;
reg67val=0Xc0;
reg68val=0X80;
break;
case 4:
reg3aval=0X14;
reg67val=0X40;
reg68val=0X40;
break;
case 5:
reg3aval=0X14;
reg67val=0X80;
reg68val=0XC0;
break;
case 6:
reg3aval=0X14;
reg67val=0XA0;
reg68val=0X40;
break;
}
SCCB_WR_Reg(0X3A,reg3aval);
SCCB_WR_Reg(0X68,reg67val);
SCCB_WR_Reg(0X67,reg68val);
}
以上代碼實作對OV7670的介面訪問, 實作OV7670初始化(配置為640×80 RGB模式),并持續向外輸出影像,
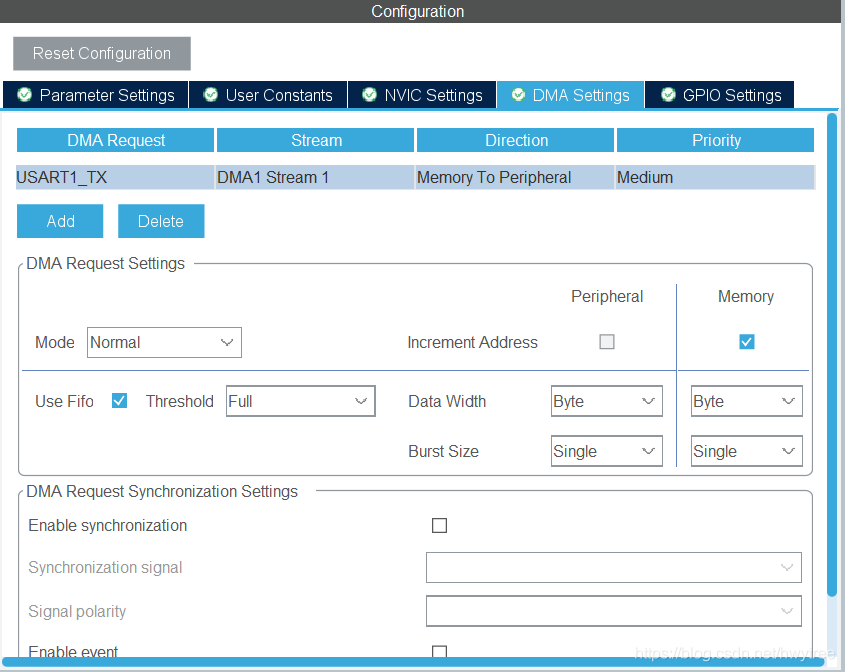
8. DMA發送機制
STM32通過串口接收指令,程式里設計一個標識變數scmd用于指示接收到的指令,需要在USB虛擬串口的接收函式里進行處理:
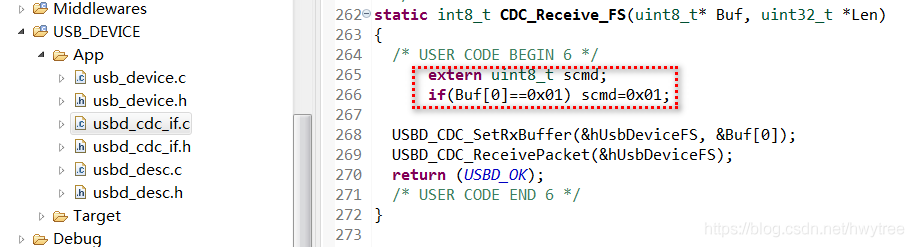
static int8_t CDC_Receive_FS(uint8_t* Buf, uint32_t *Len)
{
/* USER CODE BEGIN 6 */
extern uint8_t scmd;
if(Buf[0]==0x01) scmd=0x01;
USBD_CDC_SetRxBuffer(&hUsbDeviceFS, &Buf[0]);
USBD_CDC_ReceivePacket(&hUsbDeviceFS);
return (USBD_OK);
/* USER CODE END 6 */
}
以及在USART1的接收中斷里進行處理:
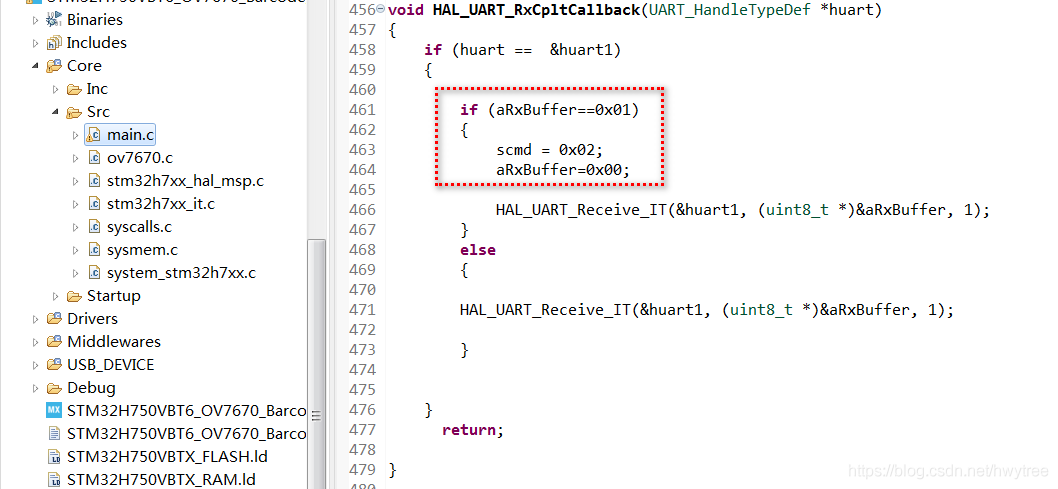
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
if (aRxBuffer==0x01)
{
scmd = 0x02;
aRxBuffer=0x00;
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
else
{
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
}
return;
}
STM32向上位機發送影像資料采用USB虛擬串口或串口DMA方式,程式里設計一個標識變數tx_busy,在當前DMA發送完后指示狀態:
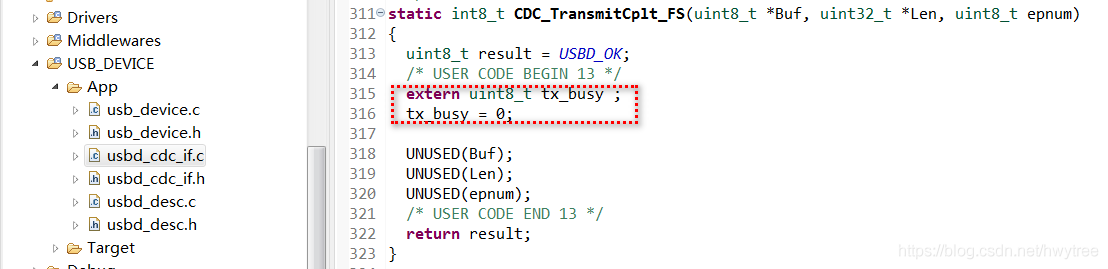
static int8_t CDC_TransmitCplt_FS(uint8_t *Buf, uint32_t *Len, uint8_t epnum)
{
uint8_t result = USBD_OK;
/* USER CODE BEGIN 13 */
extern uint8_t tx_busy ;
tx_busy = 0;
UNUSED(Buf);
UNUSED(Len);
UNUSED(epnum);
/* USER CODE END 13 */
return result;
}
同樣,對USART1的DMA發送完處理:
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
extern uint8_t tx_busy;
if (huart == &huart1)
{
tx_busy = 0;
}
}
9. DCMI DMA地址自增方式
初始化DCMI DMA配置時,如將接收地址設定為不自增方式,后續的影像捕獲需要作業在DMA接收地址自增方式,因此單獨設計兩個函式可用于切換,
void DCMI_DMA_MemInc_En(void)
{
HAL_DMA_DeInit(&hdma_dcmi);
hdma_dcmi.Init.MemInc = DMA_MINC_ENABLE;
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
}
void DCMI_DMA_MemInc_Den(void)
{
HAL_DMA_DeInit(&hdma_dcmi);
hdma_dcmi.Init.MemInc = DMA_MINC_DISABLE;
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
}
10. 初始化修正函式
按照1.8版本HAL庫,設計DCMI的初始化修正函式:
void PY_DCMI_Full_Init(void)
{
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_HARDWARE;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.VSPolarity = DCMI_VSPOLARITY_HIGH;
hdcmi.Init.HSPolarity = DCMI_HSPOLARITY_LOW;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.JPEGMode = DCMI_JPEG_DISABLE;
hdcmi.Init.ByteSelectMode = DCMI_BSM_ALL;
hdcmi.Init.ByteSelectStart = DCMI_OEBS_ODD;
hdcmi.Init.LineSelectMode = DCMI_LSM_ALL;
hdcmi.Init.LineSelectStart = DCMI_OELS_ODD;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
}
11. 主函式代碼
在程式跑起來后,會先對OV7670介面進行典型暫存器讀取并USART1串口輸出,用于識別介面時序是否正常,然后進入命令等待,接收到指令后,再從OV7670輸出的影像中截取資料串口DMA輸出,
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usb_device.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include "ov7670.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
void DCMI_DMA_MemInc_En(void);
void DCMI_DMA_MemInc_Den(void);
void PY_DCMI_Full_Init(void);
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
uint8_t aRxBuffer=0;
uint8_t TxBuff[99] = {0};
uint8_t StatusFlag = 0;
uint8_t OV7670_verh = 0xff, OV7670_verl=0xff;
HAL_StatusTypeDef dcmi_dma_status = HAL_OK;
uint32_t* dcmi_data_buff;
uint32_t DCMI_RN = 0; //row number
uint32_t DCMI_CN = 0; //column number
uint32_t DCMI_RS = 0; //row start
uint32_t DCMI_CS = 0; //column start
uint8_t scmd = 0;
uint8_t tx_busy = 0;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
DCMI_HandleTypeDef hdcmi;
DMA_HandleTypeDef hdma_dcmi;
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_tx;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_DCMI_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
dcmi_data_buff = 0x30000000;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USB_DEVICE_Init();
MX_DCMI_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
if (HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1)!=HAL_OK)
{
MX_USART1_UART_Init();
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
SCCB_Rst();
OV7670_verh = SCCB_RD_Reg(0x0a);
OV7670_verl = SCCB_RD_Reg(0x0b);
HAL_UART_Transmit(&huart1, &OV7670_verh, 1, 0xFFFFFF);
HAL_Delay(50);
HAL_UART_Transmit(&huart1, &OV7670_verl, 1, 0xFFFFFF);
HAL_Delay(50);
OV7670_640_480_RGB565_Init();
OV7670_Light_Mode(0);
OV7670_Color_Saturation(2);
OV7670_Brightness(2);
OV7670_Contrast(2);
HAL_Delay(200);
HAL_DCMI_DeInit(&hdcmi);
PY_DCMI_Full_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_Delay(1);
if (scmd==1)
{
scmd = 0;
TxBuff[0]=0x55;TxBuff[1]=0xaa;
TxBuff[2]=0x01; //OV7670 label
tx_busy = 1;
CDC_Transmit_FS(TxBuff, 3);
while(tx_busy==1) HAL_Delay(1);
dcmi_dma_status = HAL_DCMI_Init(&hdcmi);
for (uint8_t i=0; i<10;i++)
{
HAL_DCMI_DisableCrop (&hdcmi);
DCMI_RN = 48;
DCMI_CN = 1280;
DCMI_RS = 48*i;
DCMI_CS = 0;
HAL_DCMI_ConfigCrop (&hdcmi, DCMI_CS, DCMI_RS, DCMI_CN, DCMI_RN);
HAL_Delay(1);
HAL_DCMI_EnableCrop (&hdcmi);
HAL_Delay(1);
dcmi_dma_status = HAL_DCMI_Start_DMA(&hdcmi, DCMI_MODE_SNAPSHOT, dcmi_data_buff, DCMI_CN*DCMI_RN/4);
while(HAL_DMA_GetState(&hdcmi)==HAL_DMA_STATE_BUSY) ;
HAL_DCMI_Stop(&hdcmi);
tx_busy = 1;
CDC_Transmit_FS((uint8_t *)dcmi_data_buff, 61440);
while(tx_busy!=0) ;
}
}
if (scmd==2)
{
scmd = 0;
DCMI_DMA_MemInc_En();
TxBuff[0]=0x55;TxBuff[1]=0xaa;
TxBuff[2]=0x01; //OV7670 label
HAL_UART_Transmit(&huart1, TxBuff, 3, 0xFFFFFF);
HAL_Delay(100);
dcmi_dma_status = HAL_DCMI_Init(&hdcmi);
for (uint8_t i=0; i<10;i++)
{
HAL_DCMI_DisableCrop (&hdcmi);
DCMI_RN = 48;
DCMI_CN = 1280;
DCMI_RS = 48*i;
DCMI_CS = 0;
HAL_DCMI_ConfigCrop (&hdcmi, DCMI_CS, DCMI_RS, DCMI_CN, DCMI_RN);
HAL_Delay(1);
HAL_DCMI_EnableCrop (&hdcmi);
HAL_Delay(1);
dcmi_dma_status = HAL_DCMI_Start_DMA(&hdcmi, DCMI_MODE_SNAPSHOT, dcmi_data_buff, DCMI_CN*DCMI_RN/4);
while(HAL_DMA_GetState(&hdcmi)==HAL_DMA_STATE_BUSY) ;
HAL_DCMI_Stop(&hdcmi);
tx_busy = 1;
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)dcmi_data_buff, 61440);
while(tx_busy!=0) HAL_Delay(1);
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI48|RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.HSI48State = RCC_HSI48_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 32;
RCC_OscInitStruct.PLL.PLLN = 480;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_1;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
HAL_RCC_MCOConfig(RCC_MCO1, RCC_MCO1SOURCE_HSI48, RCC_MCODIV_2);
}
/**
* @brief DCMI Initialization Function
* @param None
* @retval None
*/
static void MX_DCMI_Init(void)
{
/* USER CODE BEGIN DCMI_Init 0 */
/* USER CODE END DCMI_Init 0 */
/* USER CODE BEGIN DCMI_Init 1 */
/* USER CODE END DCMI_Init 1 */
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_EMBEDDED;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.SyncroCode.FrameEndCode = 0;
hdcmi.Init.SyncroCode.FrameStartCode = 0;
hdcmi.Init.SyncroCode.LineStartCode = 0;
hdcmi.Init.SyncroCode.LineEndCode = 0;
hdcmi.Init.JPEGMode = DCMI_JPEG_DISABLE;
hdcmi.Init.ByteSelectMode = DCMI_BSM_ALL;
hdcmi.Init.ByteSelectStart = DCMI_OEBS_ODD;
hdcmi.Init.LineSelectMode = DCMI_LSM_ALL;
hdcmi.Init.LineSelectStart = DCMI_OELS_ODD;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN DCMI_Init 2 */
/* USER CODE END DCMI_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 230400;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Stream0_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream0_IRQn);
/* DMA1_Stream1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream1_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7|GPIO_PIN_8, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_10, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_11, GPIO_PIN_RESET);
/*Configure GPIO pins : PE7 PE8 */
GPIO_InitStruct.Pin = GPIO_PIN_7|GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/*Configure GPIO pins : PD10 PD11 */
GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/*Configure GPIO pin : PA8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF0_MCO;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
if (aRxBuffer==0x01)
{
scmd = 0x02;
aRxBuffer=0x00;
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
else
{
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
}
return;
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
extern uint8_t tx_busy;
if (huart == &huart1)
{
tx_busy = 0;
}
}
void DCMI_DMA_MemInc_En(void)
{
HAL_DMA_DeInit(&hdma_dcmi);
hdma_dcmi.Init.MemInc = DMA_MINC_ENABLE;
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
}
void DCMI_DMA_MemInc_Den(void)
{
HAL_DMA_DeInit(&hdma_dcmi);
hdma_dcmi.Init.MemInc = DMA_MINC_DISABLE;
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
}
void PY_DCMI_Full_Init(void)
{
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_HARDWARE;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.VSPolarity = DCMI_VSPOLARITY_HIGH;
hdcmi.Init.HSPolarity = DCMI_HSPOLARITY_LOW;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.JPEGMode = DCMI_JPEG_DISABLE;
hdcmi.Init.ByteSelectMode = DCMI_BSM_ALL;
hdcmi.Init.ByteSelectStart = DCMI_OEBS_ODD;
hdcmi.Init.LineSelectMode = DCMI_LSM_ALL;
hdcmi.Init.LineSelectStart = DCMI_OELS_ODD;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
12. STM32H750完整代碼
基于STM32CUBEIDE工程:
https://download.csdn.net/download/hwytree/20372220
13. 上位機軟體
配套測驗用上位機軟體分為一維碼識別和二維碼識別兩個軟體,下載地址:
一維碼識別
https://download.csdn.net/download/hwytree/20306099
二維碼識別
https://download.csdn.net/download/hwytree/20306112
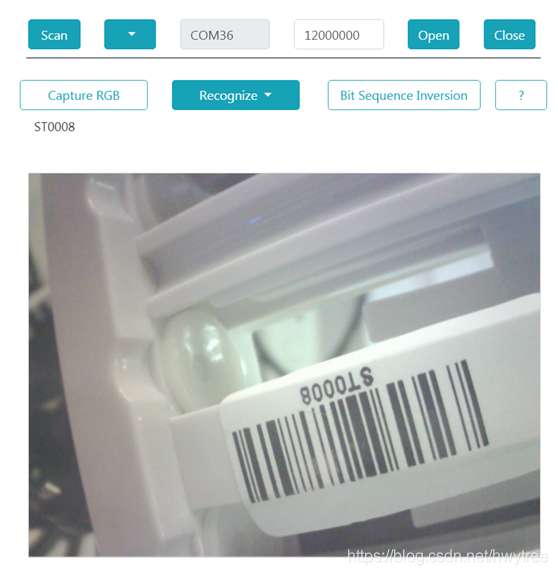
14. 一維碼識別效果
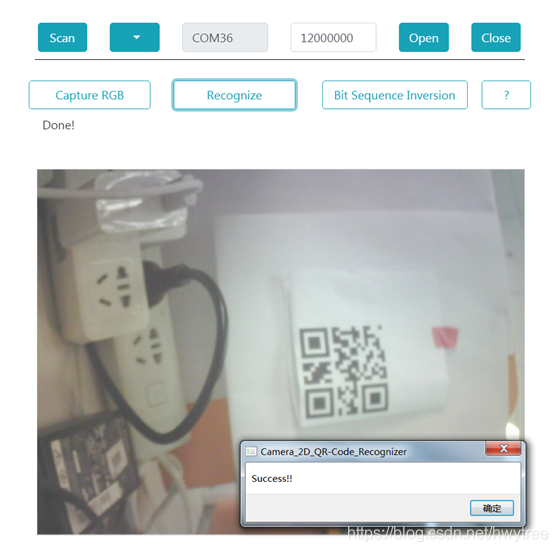
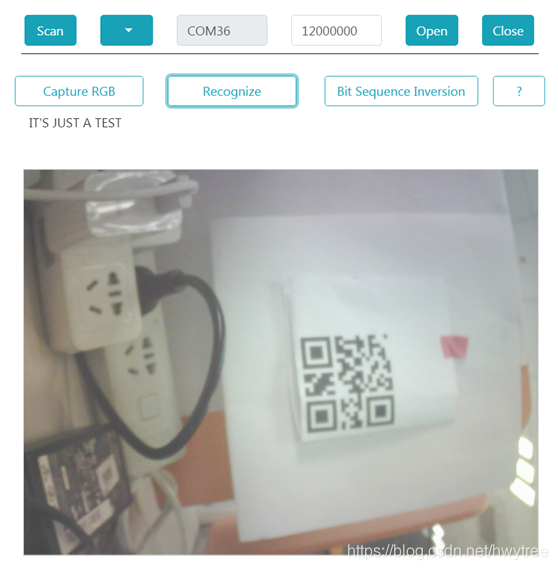
15. 二維碼識別效果
16. 上位機實作解碼原理范例
https://blog.csdn.net/hwytree/article/details/119004881
-End-
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/289707.html
標籤:其他
上一篇:OpenCV4機器學習(二):影像的讀取、顯示與存盤
下一篇:影像模板匹配演算法 c++