前言
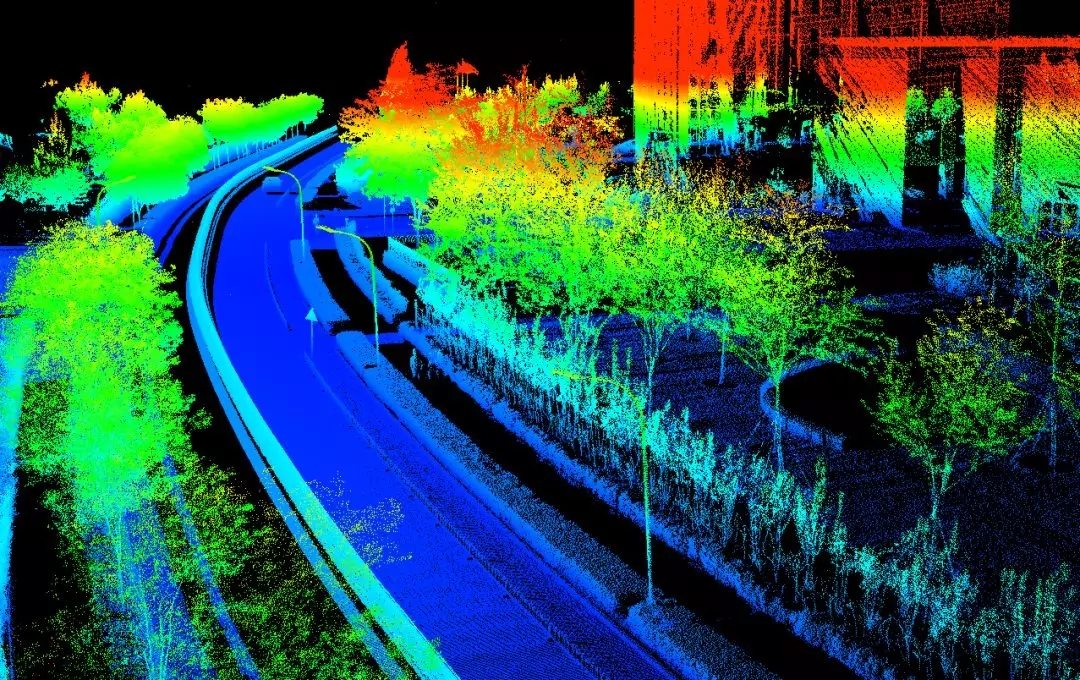
點云資料由無序的資料點構成的一個集合;點與點之間是具有空間關系的;點云資料所代表的目標對某些空間轉換應該具有不變性,如旋轉和平移,
點云資料處理方式,通常有:將點云資料投影到二維平面(多視圖法)、將點云資料劃分到有空間依賴關系的voxel(體素法)、直接在點云資料上應用深度學習模型(點云法),
目錄
一、點云資料特點
1.1 無序
1.2 點與點之間的空間關系
1.3 不變性
二、點云資料處理方式
2.1 將點云資料投影到二維平面(多視圖法)
2.2 將點云資料劃分到有空間依賴關系的voxel(體素法)
2.3 直接在點云資料上應用深度學習模型(點云法)
一、點云資料特點
點云資料是在歐式空間下的點的一個子集,它具有以下三個特征:無序、點與點之間的空間關系、空間轉換不變性,
1.1 無序
點云資料是一個集合,對資料的順序是不敏感的,這使得處理點云資料的模型需要對資料的不同排列保持不變性,
為什么說點云資料是無序的??先看下圖:
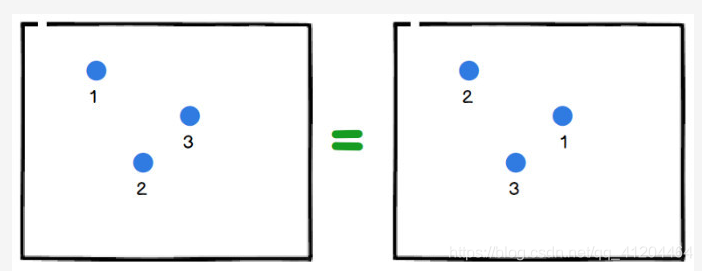
左邊有三個點云,右邊也有三個點云,雖然每個點的索引值不一樣,但是它們的分布、形狀等都是一樣的;在分類或分割模型,對左、右兩幅圖應該輸出同一個結果(看起像三角形),
再看看左邊和右邊的點云索引值不是對應的,
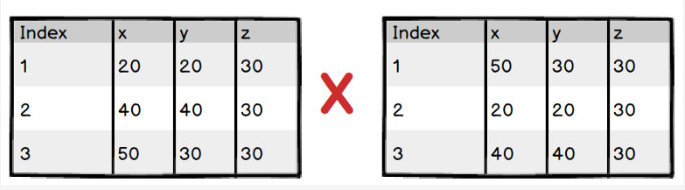
所以說:點云資料由無序的資料點構成一個集合來表示;分類或分割模型,不應該受點云資料集的順序影響,
1.2 點與點之間的空間關系
一個物體通常由特定空間內的一定數量的點云構成,也就是說這些點云之間存在空間關系,
1.3 不變性
點云資料所代表的目標對某些空間轉換應該具有不變性,如旋轉和平移, 如下圖所示,同一個物體,在空間經過旋轉或平移,還是原來那個物體,
二、點云資料處理方式
2.1 將點云資料投影到二維平面(多視圖法)
此種方式不直接處理三維的點云資料,而是先將點云投影到某些特定視角再處理,如前視視角和俯視角,再使用2D-CNN進行分類或分割,
同時,也可以融合使用來自相機的影像資訊,通過將這些不同視角的資料相結合,來實作點云資料的認知任務,比較典型的演算法有MV3D和AVOD,
MV3D-Net 融合了視覺影像和激光雷達點云資訊;輸入資料有三種,分別是點云俯視圖、點云前視圖和RGB影像,通過特征提取、特征整合和特征融合,最終得到類別標簽、3D邊界框,這樣的設計既能減少計算量,又保留了主要的特征資訊,
AVOD-Net算是MV3D-Net的加強版,它也融合了視覺影像和激光雷達點云資訊,但它去掉了激光點云的前視圖輸入、去掉了俯視圖中的強度資訊;輸入資料有二種,分別是點云俯視圖和RGB影像,AVOD-Net使用FPN來提取特征,同時添加邊界框的幾何約束,整體模型效果有提升,
詳細可看看這兩篇博客:
【論文解讀】MV3D-Net 用于自動駕駛的多視圖3D目標檢測網路
【論文解讀】AVOD-Net 用于自動駕駛的聚合視圖3D物件檢測網路
2.2 將點云資料劃分到有空間依賴關系的voxel(體素法)
基于3D-CNN的體素模型:先將點云映射到體素空間上,再通過3D-CNN進行分類或者分割,
體素化網格是將 3D 物件擬合到網格中的最直觀的方法,為了使其看起來像是像素影像,我們在這里將其稱為體素voxel,在這種情況下,3D 影像由(x,y,z)坐標描述,它看起來就會像樂高一樣,
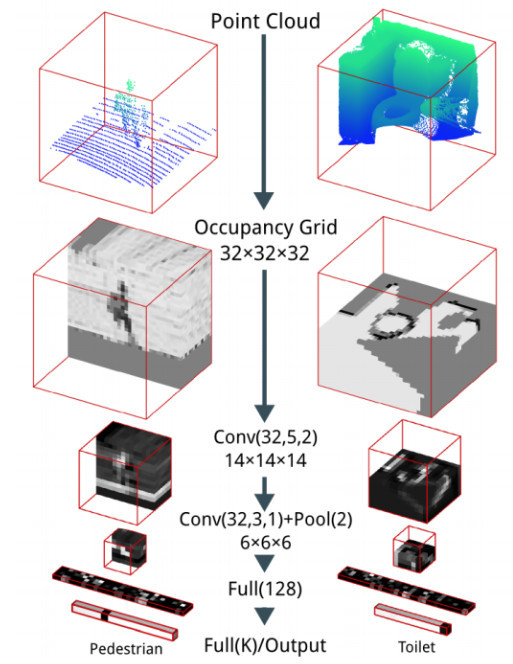
此種方式通過分割三維空間,引入空間依賴關系到點云資料中,再使用3D卷積等方式來進行處理,經典的網路有:VoxNet,
缺點1:計算量受限制,目前最好的設備也大致只能處理32×32×32的體素;另外由于體素網格的立方體性質,點云表面很多特征都沒有辦法被表述出來,因此模型效果差,
缺點2:由于是三維的資料量,時間和空間復雜度都非常高,目前已經不是主流的方法了,
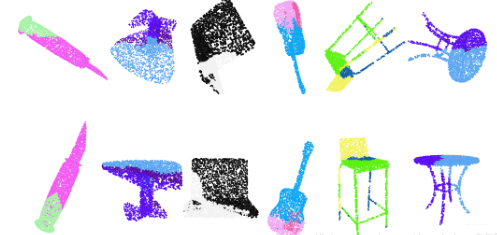
2.3 直接在點云資料上應用深度學習模型(點云法)
直接使用點云資料,比較經典的有PointNet、PointNet++,
F-PointNet 也是直接處理點云資料的方案,但它在進行點云處理之前,先使用影像資訊得到一些先驗搜索范圍,這樣既能提高效率,又能增加準確率,
F-PointNet的思路是:
- 基于影像2D目標檢測,
- 基于影像生成錐體區域,
- 在錐體內,使用 PointNet/PointNet++ 網路進行點云實體分割,
詳細可看看這篇博客:【論文解讀】F-PointNet 使用RGB影像和Depth點云深度 資料的3D目標檢測
特點:直接將三維點云拋入網路進行訓練,資料量小,主要任務有分類、分割以及大場景下語意分割,
參考:https://zhuanlan.zhihu.com/p/44809266
https://club.leiphone.com/page/TextTranslation/737
【論文解讀】MV3D-Net 用于自動駕駛的多視圖3D目標檢測網路
【論文解讀】AVOD-Net 用于自動駕駛的聚合視圖3D物件檢測網路
【論文解讀】F-PointNet 使用RGB影像和Depth點云深度 資料的3D目標檢測
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/290571.html
標籤:AI