目錄
前言
1.二維射影幾何與變換
1.1數學基礎
1.2射影變換
2.有限射影攝像機
2.1有限攝像機模型
2.2射影攝像機的幾何含義
2.3射影攝像機對點的作用
2.3.1點對射線的反向投影
2.3.2點的深度
前言
學習資料來源為《計算機視覺中的多視圖幾何(原書第二版)》,本節主要學習基本射影幾何和射影攝像機的幾何知識
1.二維射影幾何與變換
1.1數學基礎
1.平面幾何與代數的關系:向量就是點,對稱矩陣就是二次曲線
2.----n維標準歐式幾何空間
----射影空間,在二維標準歐式幾何的基礎上拓展了理想點集(無窮遠點),有了相異直線相交的概念
3.齊次向量:兩個只相差一個全域縮放因子的向量
齊次坐標不與
中任何有限點對應(即理想點)
4.根據對偶定理,可以互換點和直線的作用
1.2射影變換
幾何概念的定義:
射影映射(保線變換,射影變換或單應)是把
的點(即齊次三維向量)映射到
射影映射是
,
,
共線當且僅當
,
,
也共線
代數定義:
一個平面的射影變換是關于三維齊次向量的一種線性變換,并可以用一個非奇異3*3矩陣表示為
或更簡單地表示為
中心投影:把一張平面的點或直線通過固定公共點(投影中心)映射到另一張平面
透視映射:中心投影兩張平面建立的坐標系都為直角坐標系,
2.有限射影攝像機
2.1有限攝像機模型
基本針孔模型如下圖所示:
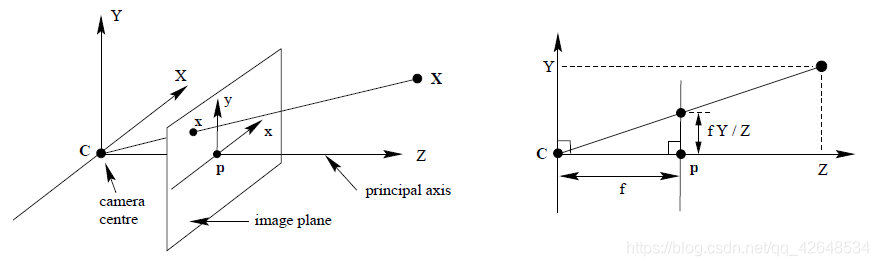
考慮空間點到一張平面上的中心投影,令投影中心位于一個歐式坐標系的原點,投影中心C是攝像機中心,也稱為光心,圖中攝像機中心位于坐標原點,影像平面或聚焦平面.攝像機到影像平面的垂線是攝像機的主軸或主射線,主軸與影像平面的交點P是主點,過攝像機中心且平行于影像平面的平面是攝像機的主平面,
攝像機坐標系的與影像平面的
的關系由相似三角形寫成齊次為:
其中,是考慮主點偏置的主點坐標,K為攝像機標定矩陣,
對于CCD相機,影像坐標以像素來測量,則需要在每個方向上引入不同的尺度因子,若在x和y方向上影像坐標單位距離的像素數分別是
,那么由K還要左乘附加因子,得到CCD攝像機標定矩陣的一般形式:
攝像機坐標系與世界坐標系
的關系由旋轉平移表示為:
其中R表示攝像機坐標系方向的3*3旋轉矩陣,表示攝像機中心在世界坐標系的坐標,
則影像坐標系與世界坐標系的關系為:
其中P為攝像機矩陣,,通常不顯式地標出攝像機中心,K中的引數稱為攝像機的內引數或攝像機的內部校準,R和
中的引數稱為外引數或外部校準,與攝像機在世界坐標系中的方位和位置有關,
事實上,P左邊的3*3非奇異子矩陣M=KR可以看作是RQ分解,因此P可以寫成如下形式:
其中
是P的最后一列,
2.2射影攝像機的幾何含義
1.攝像機中心
攝像機中心C是P的一維右零空間,即PC=0.
對于有限攝像機(M非奇異):
對于無窮遠攝像機(M奇異):
其中d是M的三維零向量,即Md=0.
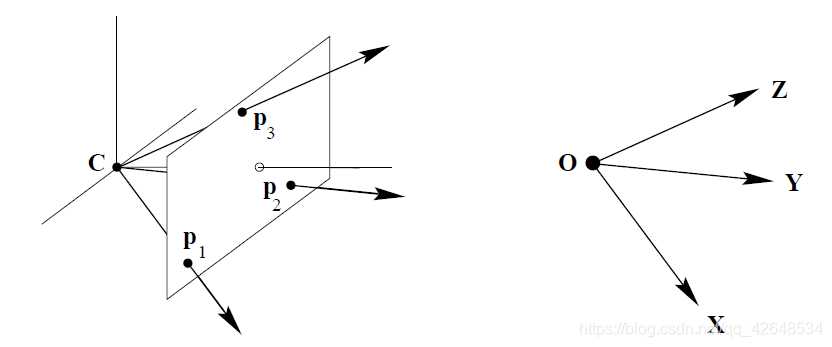
2.列向量
射影攝像機的列是3維向量,幾何含義是特殊的影像點,對于i=1,...,3,列向量分別對應于X,Y,Z軸在影像上的消影點,即這些點是軸方向的影像,列
是坐標原點的影像,
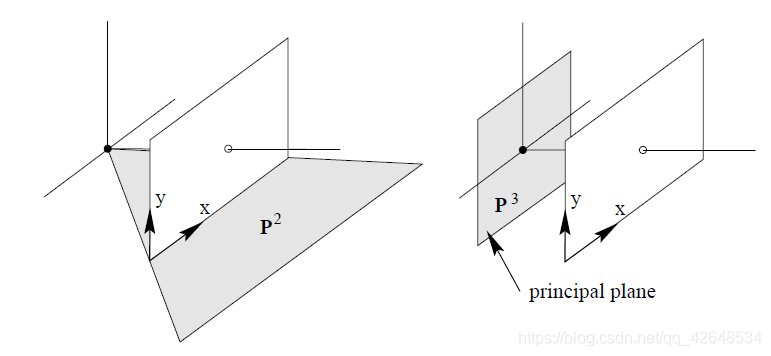
3.行向量
射影攝像機的行是4維向量,在幾何上可解釋成特殊的世界平面,經證明,攝像機的主平面是P的最后一行,
依賴于影像的x軸和y軸(與影像坐標系的選擇有關)
4.主點
事實上主點由下式計算:
其中是M的第三行,
5.主軸向量
是在主軸方向上指向攝像機前方的向量
2.3射影攝像機對點的作用
2.3.1點對射線的反向投影
根據映射x=PX,可以把空間中一個點X投影到一個影像點上,而給定一個影像點x,需要確定空間中哪些點被映射到該點,這些點組成過攝像機中心的一條空間射線,射線上有兩個點已知,它們是攝像機中心和點,其中
是
的偽逆,
.由這兩點的連線可以表示這條射線:
對于有限攝像機,由影像點x反向投影交無窮遠平面的點作為第二個點可以匯出另一種形式:
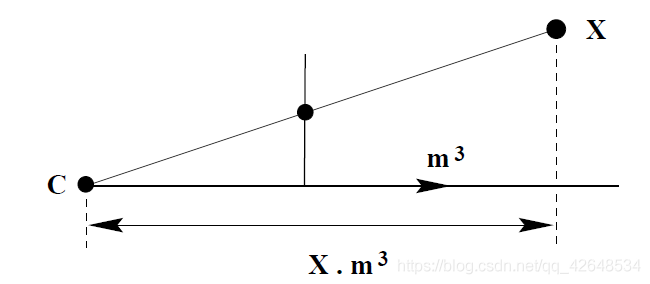
2.3.2點的深度
考慮攝像機主平面前后一點離主平面的距離,令是一個3D點,P是有限攝像機的攝像機矩陣,設
,則攝像機主平面前方的點X的深度:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/291389.html
標籤:其他