目錄
1、目標搜索
2、特征定位
3、幾何測量
3.1、卡鉗
3.2、卡尺
3.3、決議幾何
目標測量(Dimensional Measurements)是機器視覺的重要應用之一,它以被測目標的關鍵尺寸資訊為特征,對這些尺寸進行測量,或根據測量結果來判定產品質量是否合格,尺寸資訊包括間距、角度、面積以及根據邊緣點擬合得到的線段、多邊形、圓或橢圓等決議幾何形狀的引數等,
基于機器視覺的目標測量系統一般用于對尺寸小、生產批量大的工件進行測量和質量檢測,如電子連接器件、繼電器開關等,若要人工對這些器件的尺寸進行測量,不僅要耗費大量時間和精力,而且由于受人為因素影響,常不能得到準確的檢測結果,
此外,機器視覺目標測量系統能在一些人類無法進入的環境中作業,如有毒或高溫的環境等,機器視覺目標測量系統可以在線或離線的方式解決各種實際問題,
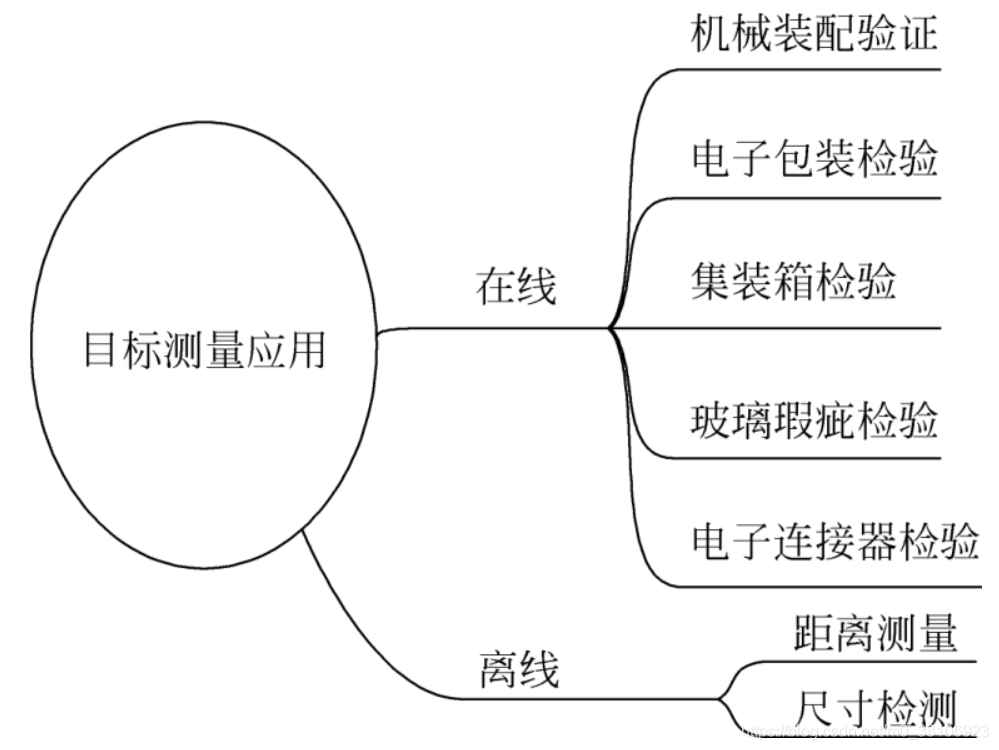
- 在線方式下,測量和判定程序發生在生產線的生產或裝配程序中,常見的在線測量應用包括機械裝配驗證、電子包裝檢驗、集裝箱檢驗、玻璃瑕疵檢驗和電子連接器檢驗等;
- 離線方式下,測量和判定程序則發生在生產線下,它對實時性的要求相對于在線測量判定程序要低些,
下圖匯總了機器視覺目標測量系統的常見應用:
機器視覺系統的目標測量通常包括目標搜索、特征定位、尺寸測量和結果判定4個程序,
- 目標搜索程序用于從影像中尋找被測目標或參考目標;
- 特征定位程序則通過邊緣檢測或影像匹配來確定被測量在影像中的位置;
- 隨后,就可基于它實作幾何測量程序,并進而根據測量結果以及設定的閾值來判定被測目標的質量,
實際測量程序中,由于目標的旋轉或移動,被測目標或被測量并不總是位于影像中的某一固定位置,這就要求機器視覺系統具有可根據被測目標位置在影像中自動調整測量區域的能力,
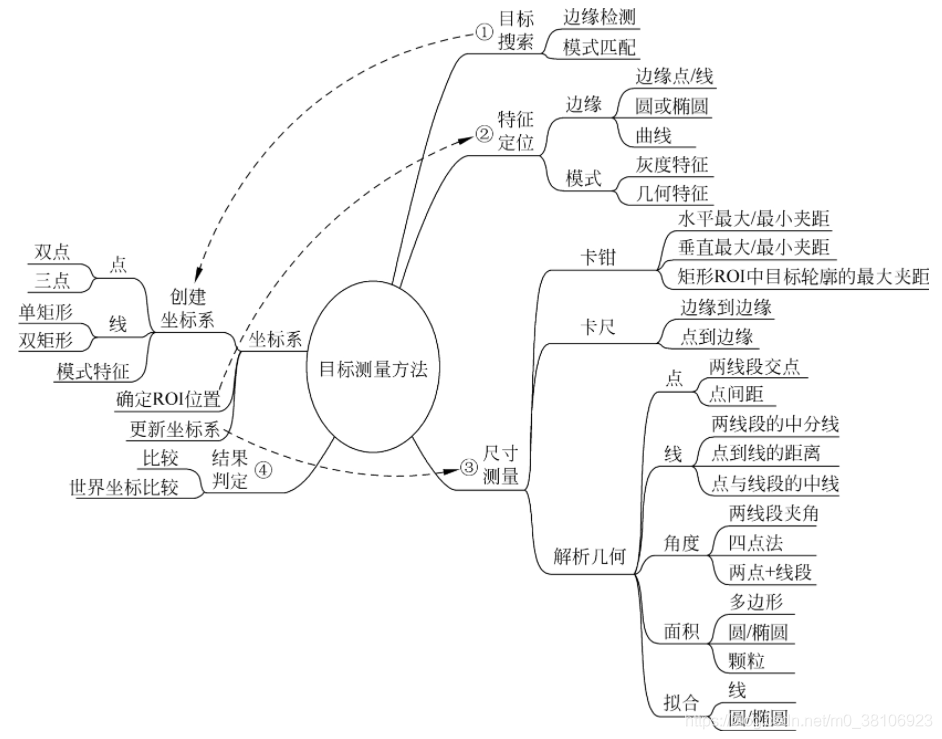
機器視覺系統可以測量的量通常包括距離、角度、面積等,在影像中對這些量進行測量的方法大致分為卡鉗(Clamp)、卡尺(Caliper)和決議幾何法,
下圖對機器視覺系統目標測量的程序、方法進行了匯總:
1、目標搜索
機器視覺目標測量系統的目標搜索程序一般用于從影像中尋找兩類目標:被測目標或參考目標,被測目標是指被測量所在的目標,參考目標則是指用于確定參考坐標系和測量坐標系的目標,換句話說,在影像中搜索到的目標,既可直接用于測量,又能用于確定測量程序的參考坐標系或測量坐標系,
由于實際測量程序中,被測目標并不總是位于影像中的某一固定位置,而是會在視場內平移或旋轉,因此對于每一幅采集到的影像,都必須重新搜索目標所在的位置和旋轉角度,邊緣檢測和影像模式匹配是完成該任務的兩種較好的方法,其中影像模式匹配方法包括:LabVIEW影像模式匹配詳細介紹的灰度匹配和幾何匹配,無論是使用邊緣檢測法還是模式匹配法搜索目標,都必須確保被測目標可以出現在指定的ROI內,
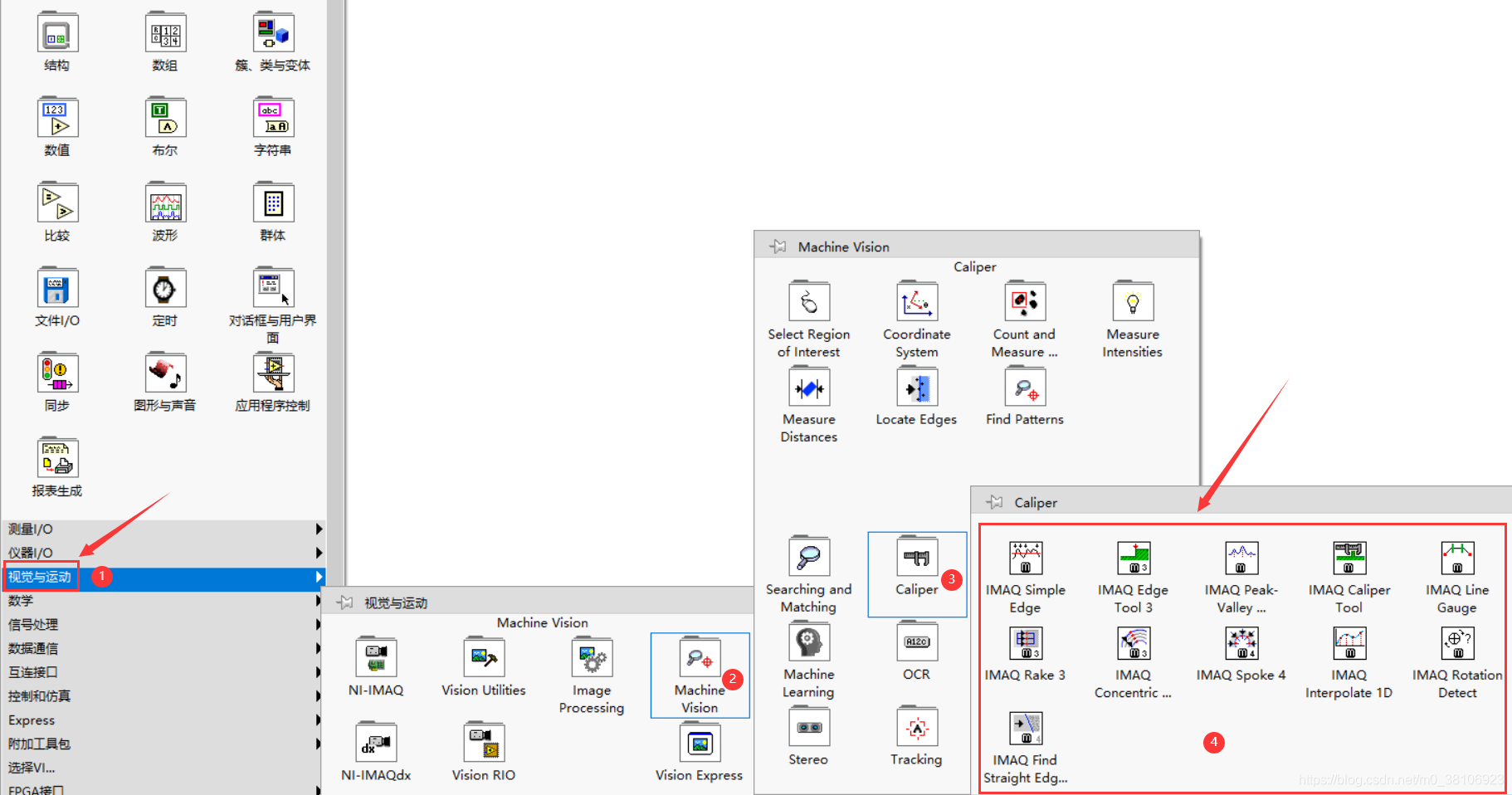
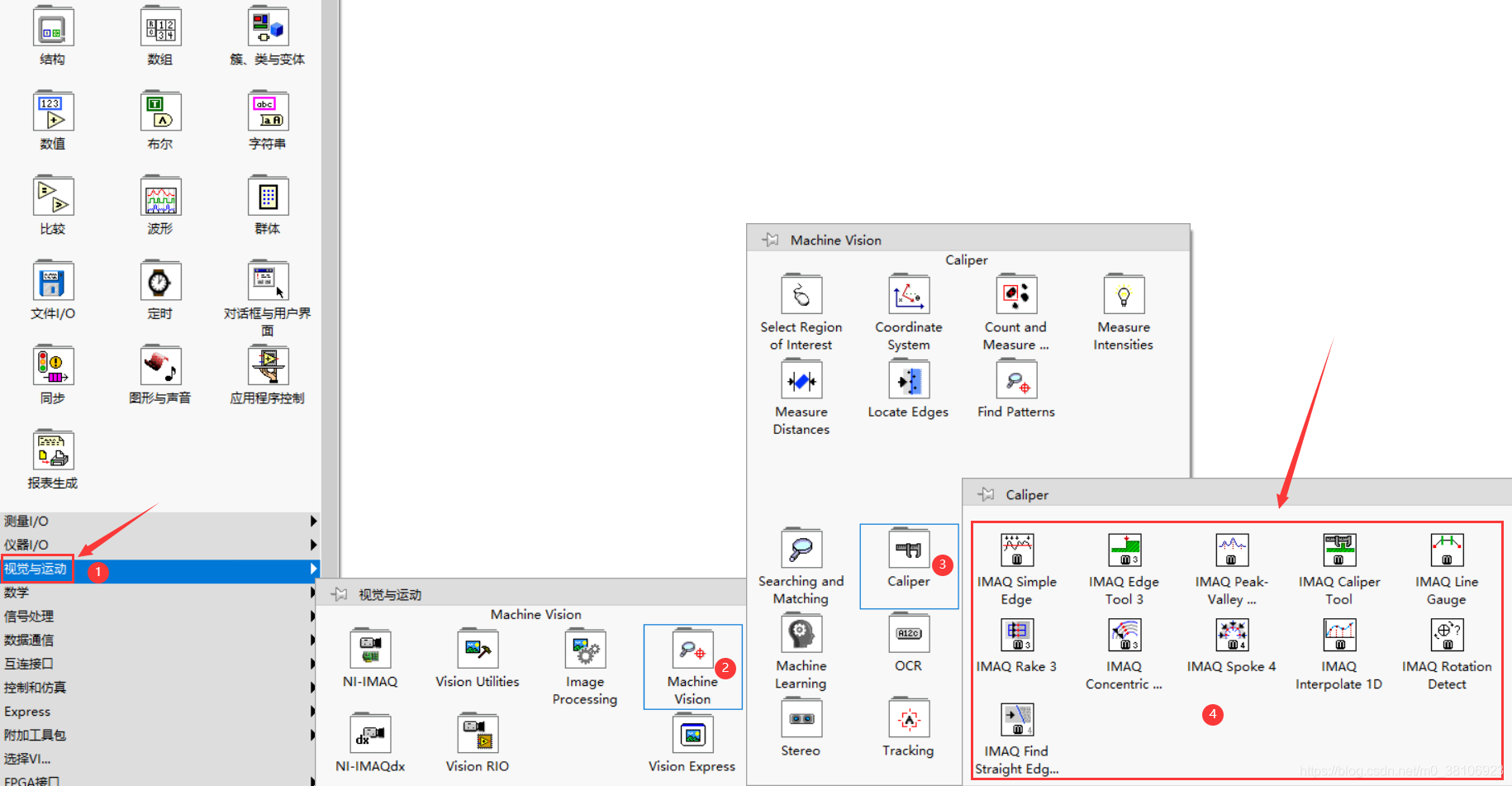
Nl Vision提供了使用邊緣檢測法搜索被測目標和參考目標的函式,若搜索的目標位置和角度直接用于測量,則可使用位于LabVIEW的視覺與運動→Machine Vision→Caliper函式選板中的各種邊緣檢測VI,如下圖所示:
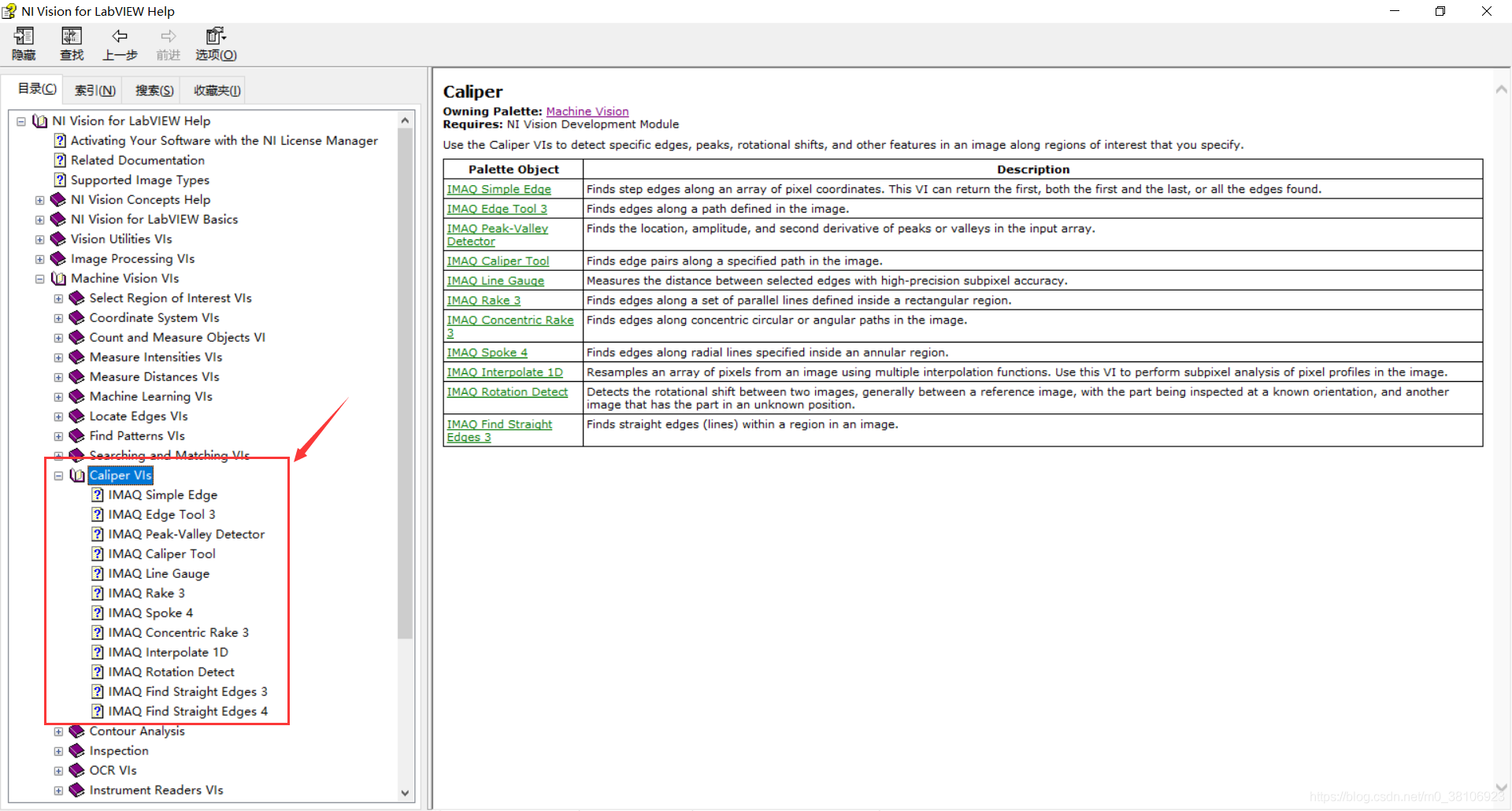
函式說明及使用可參見幫助手冊:
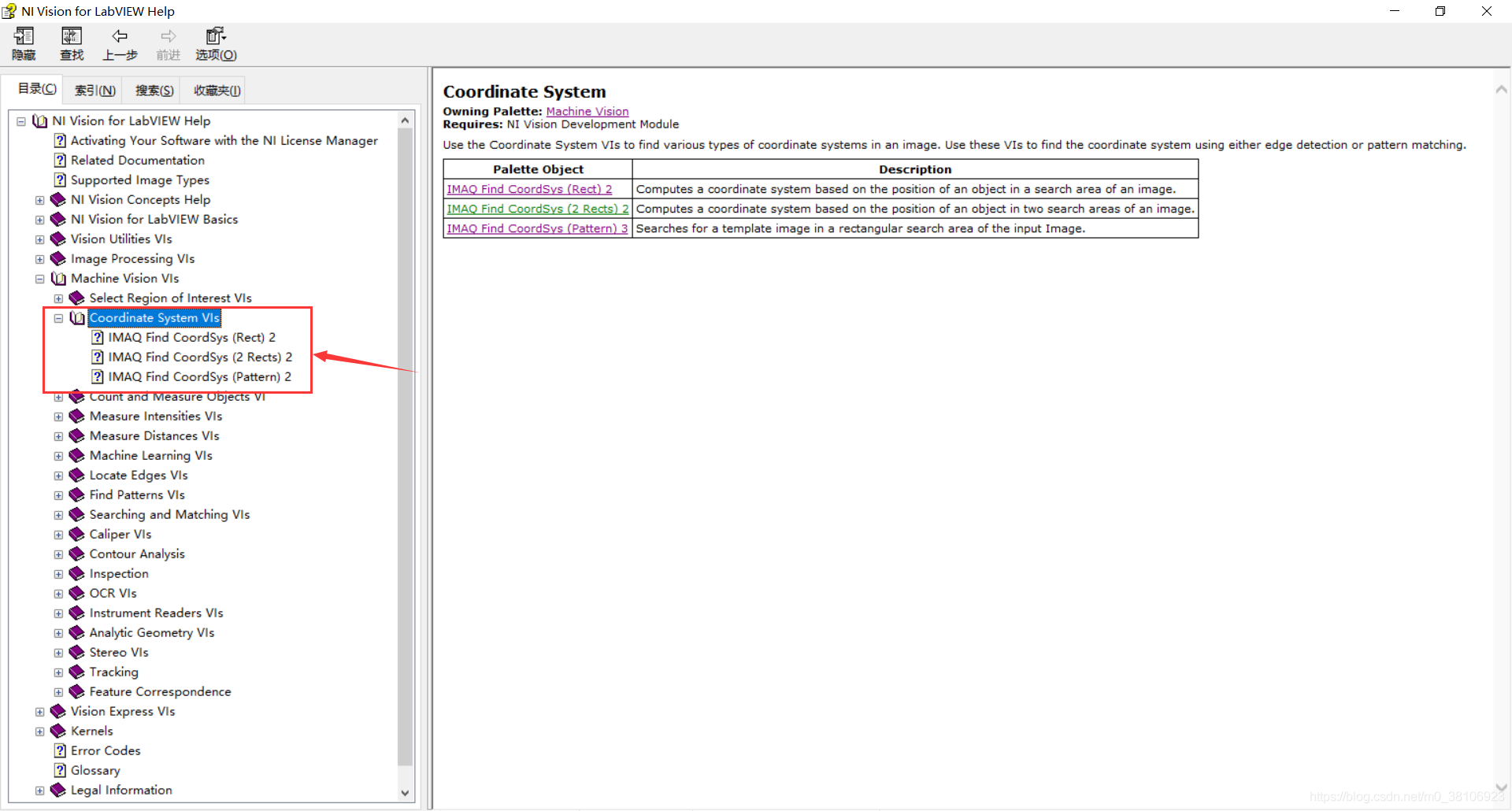
如果從影像中搜索的目標并非直接用于測量,而是用其位置來創建參考坐標系,則可使用位于LabVIEW的視覺與運動→Machine Vision→Coordinate System函式選板中的IMAQ Find CoordSys (Rect)2、IMAQ Find CoordSys (2 Rects)2,如下圖所示:
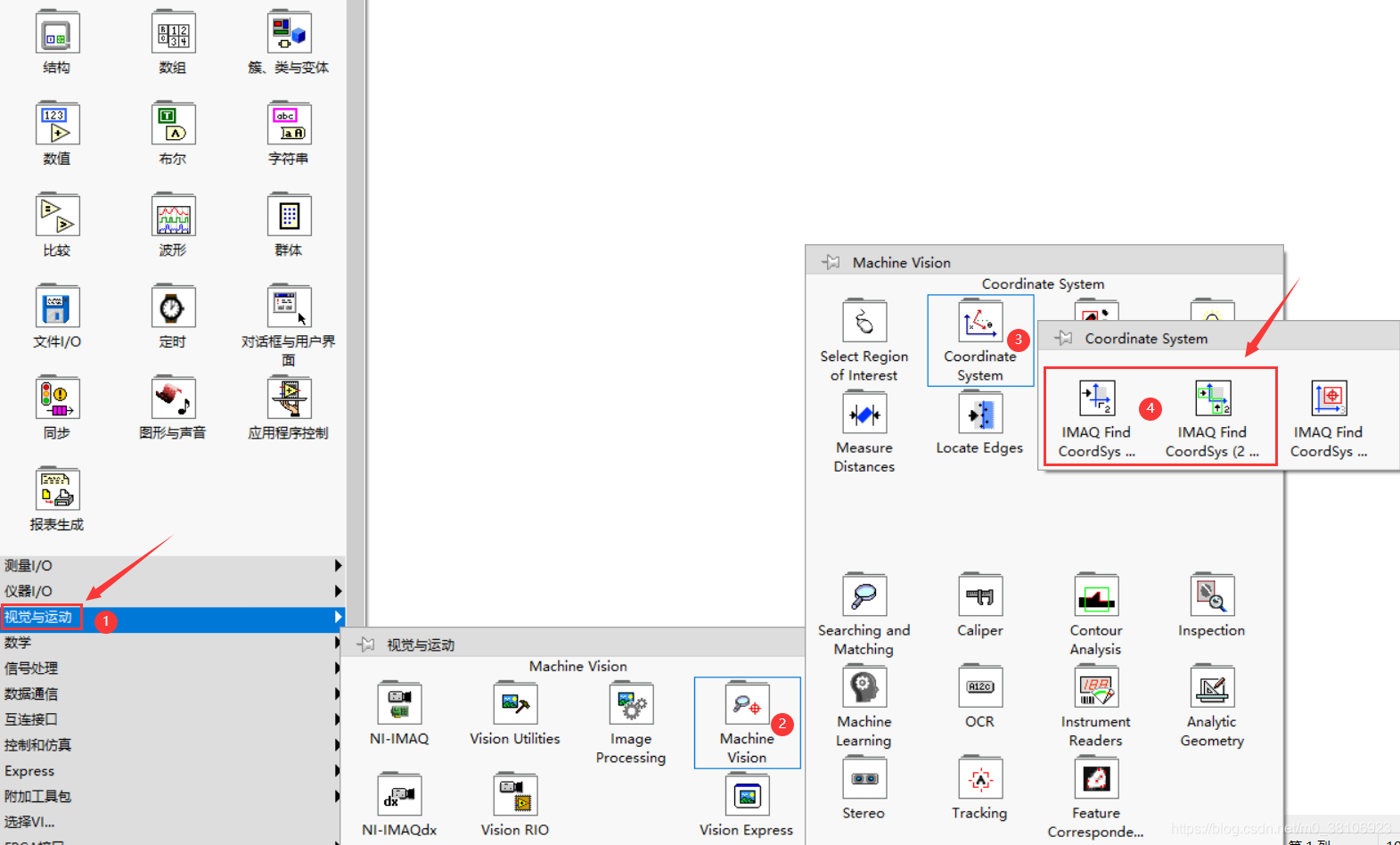
函式說明及使用可參見幫助手冊:
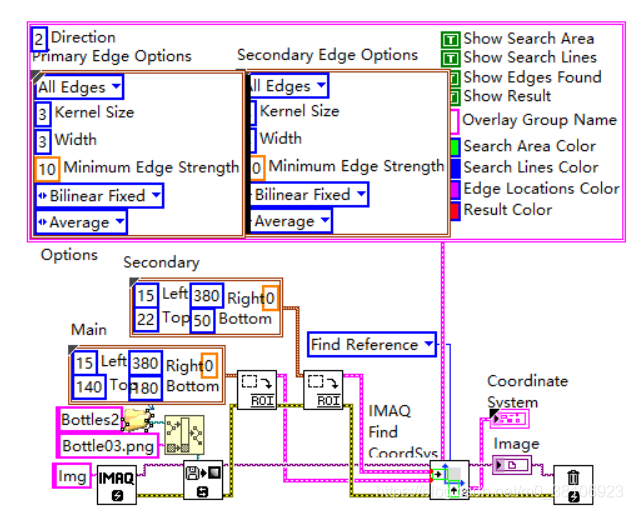
以灌裝檢測為例,系統要求生產線上各瓶內所灌裝的液位必須在指定的范圍內,液位不能過高也不能過低,由于相機相對于生產線上的瓶子位置固定,且各瓶子不會在影像垂直方向上移動,因此可以瓶子頂端構成的邊緣線作為參考,通過測量液位(由亮到暗的邊緣)到該參考線的距離來判斷液位是否合格,距離大于指定閾值,則說明液位過低;距離小于閾值,則說明液位過高,程式設計思路如下所示:
- 程式一開始先將被測影像讀入記憶體,并設定了用于從上到下、從左到右檢測邊緣的矩形ROI;
- 隨后程式呼叫IMAQ Find CoordSys(2 Rects)2,基于從這兩個VI中檢測到的邊緣來創建測量坐標;
- 在創建測量坐標時,IMAQ Find CoordSys(2 Rects)2先將從上到下搜索到的邊緣線作為坐標系的縱軸(主軸),然后再以從左到右搜索到的邊緣與水平邊緣的交點為坐標原點,參照坐標系的型別(直接/間接)確定坐標系的橫軸,Options引數用于控制邊緣的搜索程序和搜索結果的顯示,
程式設計如下所示:
如下圖所示的實體運行結果中顯示了搜索矩形、搜索方向和最終確定的坐標系:
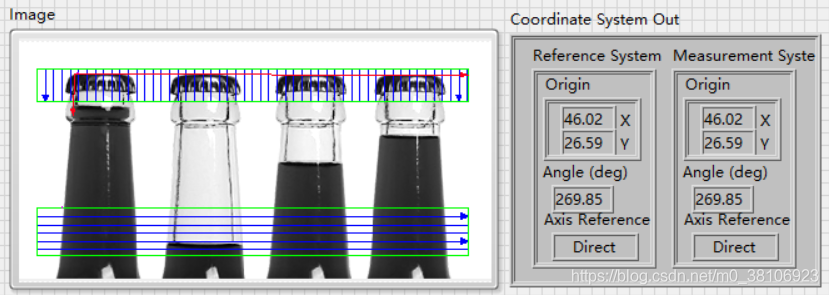
資源下載請參見:https://download.csdn.net/download/m0_38106923/20614859
2、特征定位
搜索到被測目標并確定了測量坐標系之后,就可以定位被測特征的位置,由于實際工業生產環境中被測目標并不總是固定在視場中,因此待測的特征位置也會隨著目標在影像中平移、旋轉,這意味著對每一幅采集到的影像,開發人員必須先設法重新定位被測特征的位置,才能進行準確測量,
如前所述,可以基于參考坐標系和測量坐標系來解決這一問題,其程序可分為以下兩步:
- 在系統初始化階段,從標準影像中搜索被測目標,確定參考坐標系并放置定位待測特征的ROI;
- 在系統采集和檢測階段,從每幅被測影像中重新搜索目標位置更新測量坐標系,并根據新坐標系和參考坐標系的關系,變換搜索待測特征的ROI位置,
例如,以下視頻顯示了牙線檢測系統特征定位程序各階段的坐標系與ROl的變換情況,
這個案例的實作原理如下所示:
- 在初始化階段,程式呼叫IMAQ Find CoordSys(Pattern)3從標準件中搜索牙線底座,并根據匹配到的目標位置、角度創建參考坐標系;
- 為了能根據牙線的有無(區域灰度)判斷產品的質量,程式還參照參考坐標系放置了檢測牙線的ROI;
- 此后,對于每一個被測件的影像,程式再次呼叫IMAQ Find CoordSys(Pattern)3從影像中定位牙線底座的位置,并根據其位置、角度更新測量坐標系;
- 一旦得到新的測量坐標系,程式就可以根據參考坐標系和測量坐標系之間的關系,對特征ROl的位置進行相應的平移和旋轉,確保待測特征能準確落在ROI中,
3、幾何測量
準確鎖定目標和待測量的特征后,就可以基于特征進行各種測量任務,Nl Vision提供的目標測量函式可分為卡鉗、卡尺和決議幾何法三大類,使用這些工具可以實作距離、角度、面積等物理量的測量,
3.1、卡鉗
卡鉗工具位于LabVIEW的視覺與運動→Machine Vision→Measure Distance函式選板中,如下所示:
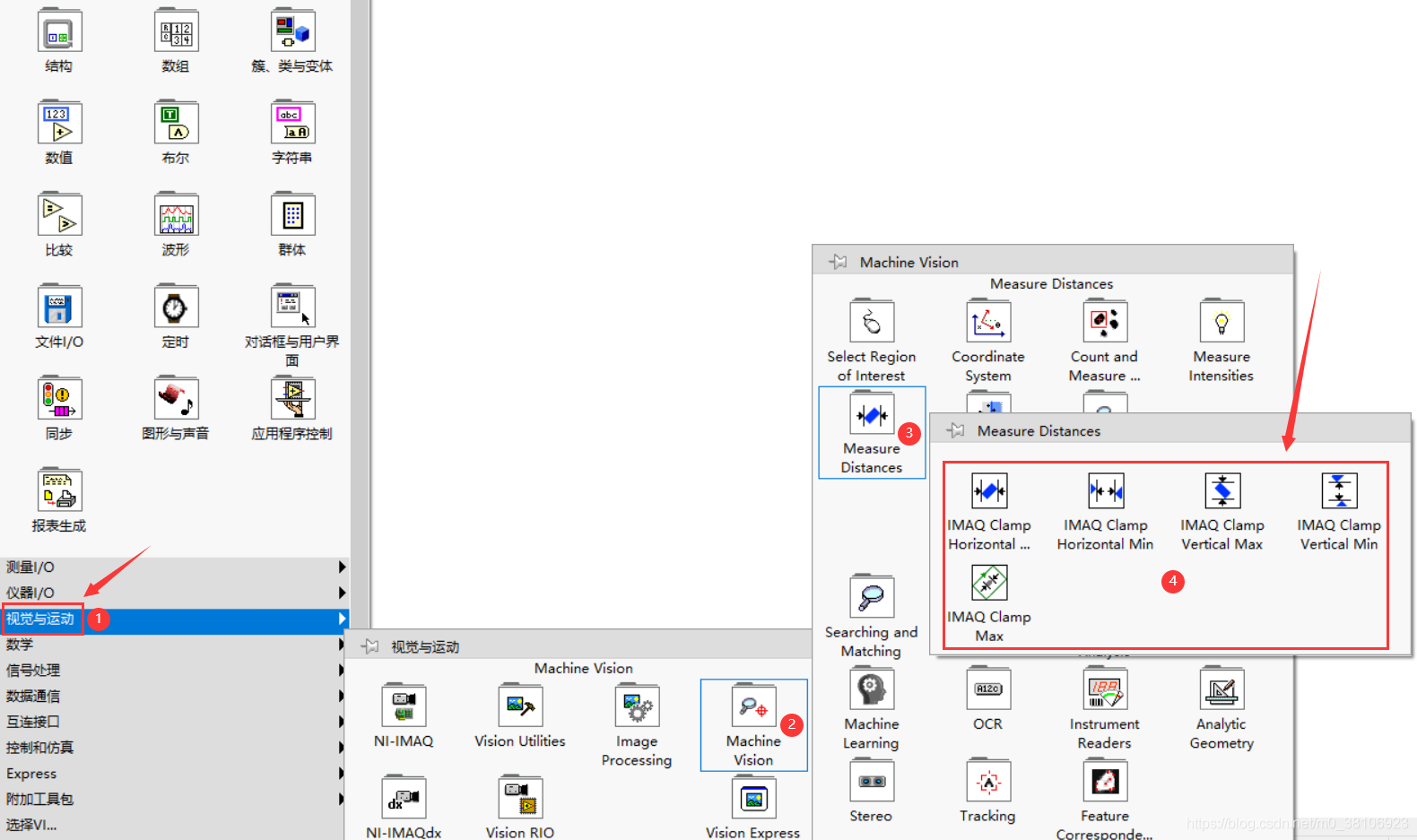
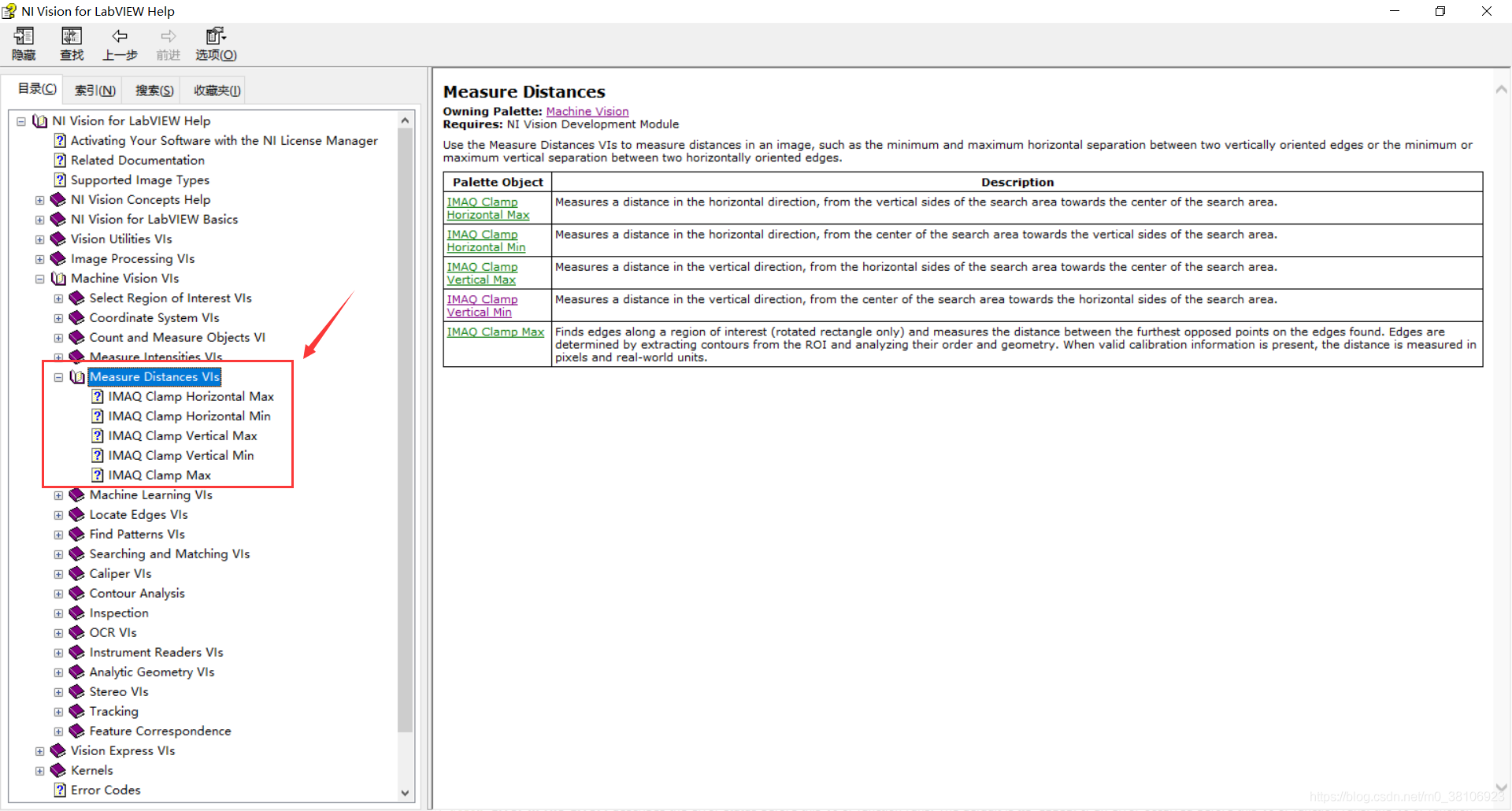
函式說明及使用可參見幫助手冊:
使用卡鉗不僅可以測量同一方搜索向上目標兩邊緣之間的最大或最小距離,還可以測量目標輪廓上位于同一直線上的兩點間的最大距離,測量原理可如以下方式理解:
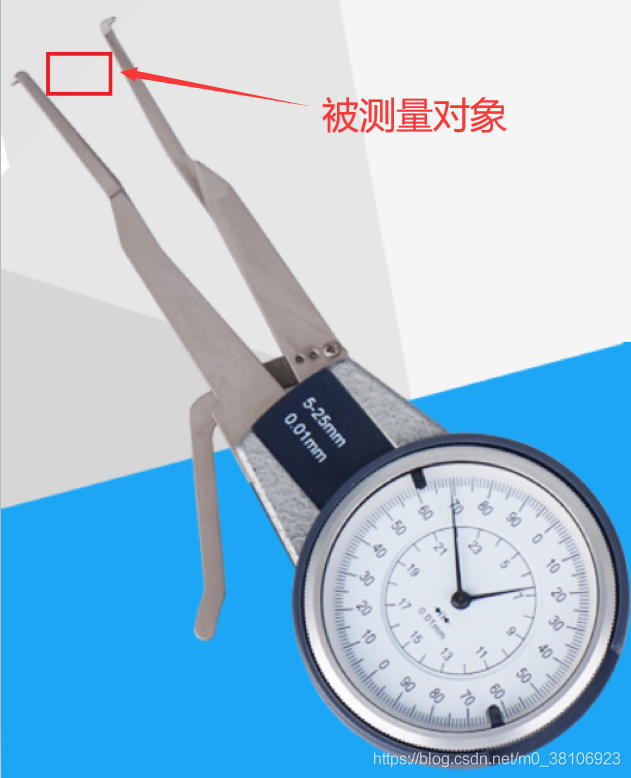
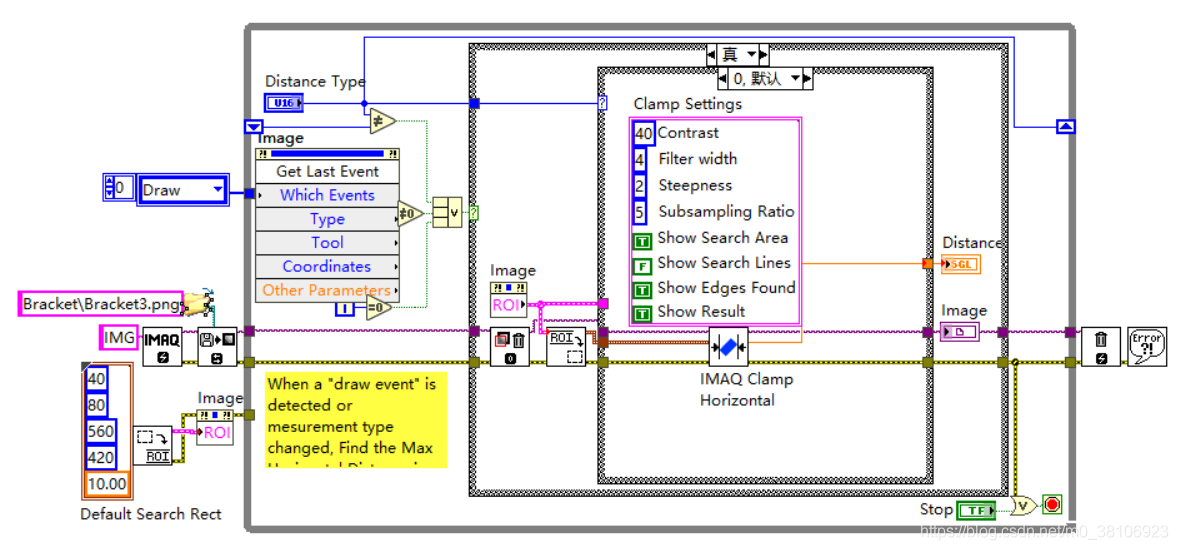
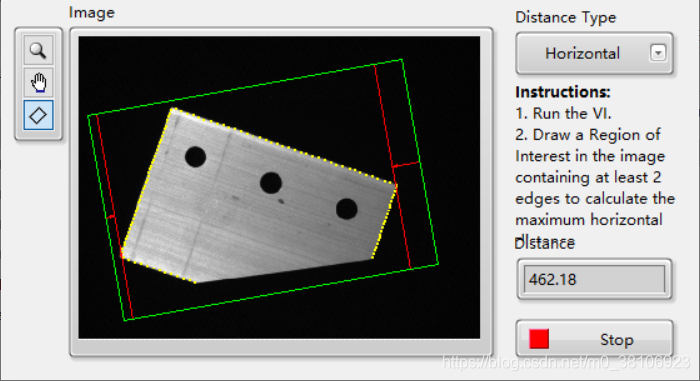
通過使用IMAQ Clamp Horizontal Max測量某一工件沿矩形ROI水平搜索方向上最大距離的實體,了解卡鉗的使用方法,
程式已開始先為影像處理分配記憶體,讀取影像檔案并設定默認矩形搜索區域,隨后,While回圈將監測下述3個條件:
- 回圈是否首次執行;
- 影像顯示控制元件中是否有繪制ROI的Draw事件發生;
- 測量型別控制元件Distance Type的值是否有變換,
程式設計如下所示:
通過運行程式,效果如下所示:
資源下載請參見:https://download.csdn.net/download/m0_38106923/20666546
3.2、卡尺
與卡鉗工具在影像中測量兩個平行線所夾的目標長度不同,卡尺工具則主要用來沿影像中某一指定的ROI路徑檢測該路徑上的邊緣、灰度峰值,根據該路徑上像素特征檢測目標的旋轉角度,或者測量ROI路徑上的其他影像特征,測量原理可如以下方式理解:

Nl Vision提供的卡尺工具位于LabVIEW的視覺與運動→Machine Vision→Caliper函式選板中,如下圖所示:
函式說明及使用可參見幫助手冊:
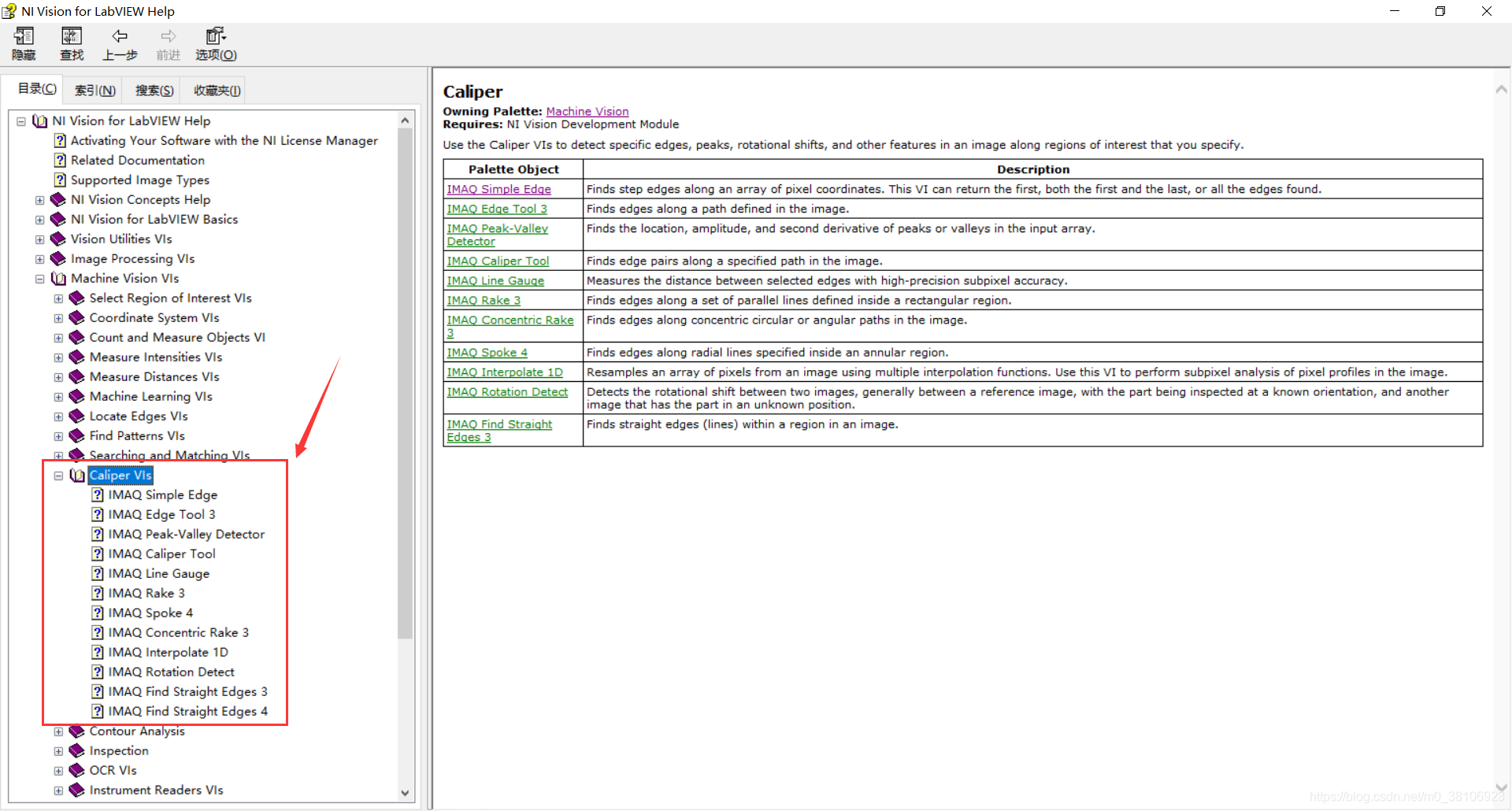
Nl Vision的Caliper工具中的大多數邊緣檢測VI在前面已經詳細介紹過,例如,IMAQSimple Edge和IMAQ Edge Tool 3用于邊緣點的檢測,其中IMAQ Simple Edge可以沿一維像素序列檢測其中的灰度邊緣點;IMAQ Edge Tool 3則可基于優化后的邊緣檢測演算法,沿影像中任意指定的路徑檢測各類邊緣點,包括上升邊緣、下降邊緣、搜索路徑上的首、尾或所有邊緣點以及邊緣強度最大的最佳邊緣點,
除了邊緣檢測,Caliper工具中還包括波峰–波谷檢測、邊緣對檢測、灰度插值、邊緣間距測量和旋轉檢測等函式,IMAQ Peak-Valley Detector可檢測以陣列形式輸入的一組像素波峰或波谷的位置、灰度以及二階導數,它依次對個數等于寬度(Width)引數的像素進行二次多項式擬合,然后將結果與閾值(Threshold)引數比較,最侄訓傳高于閾值的波峰或低于閾值的波谷部分,
3.3、決議幾何
卡鉗和卡尺工具可直接對影像中的目標進行尺寸測量,決議幾何法則基于各種影像分析或影像處理結果,使用決議幾何原理,間接計算各種待測量的值,如距離、面積或角度等,
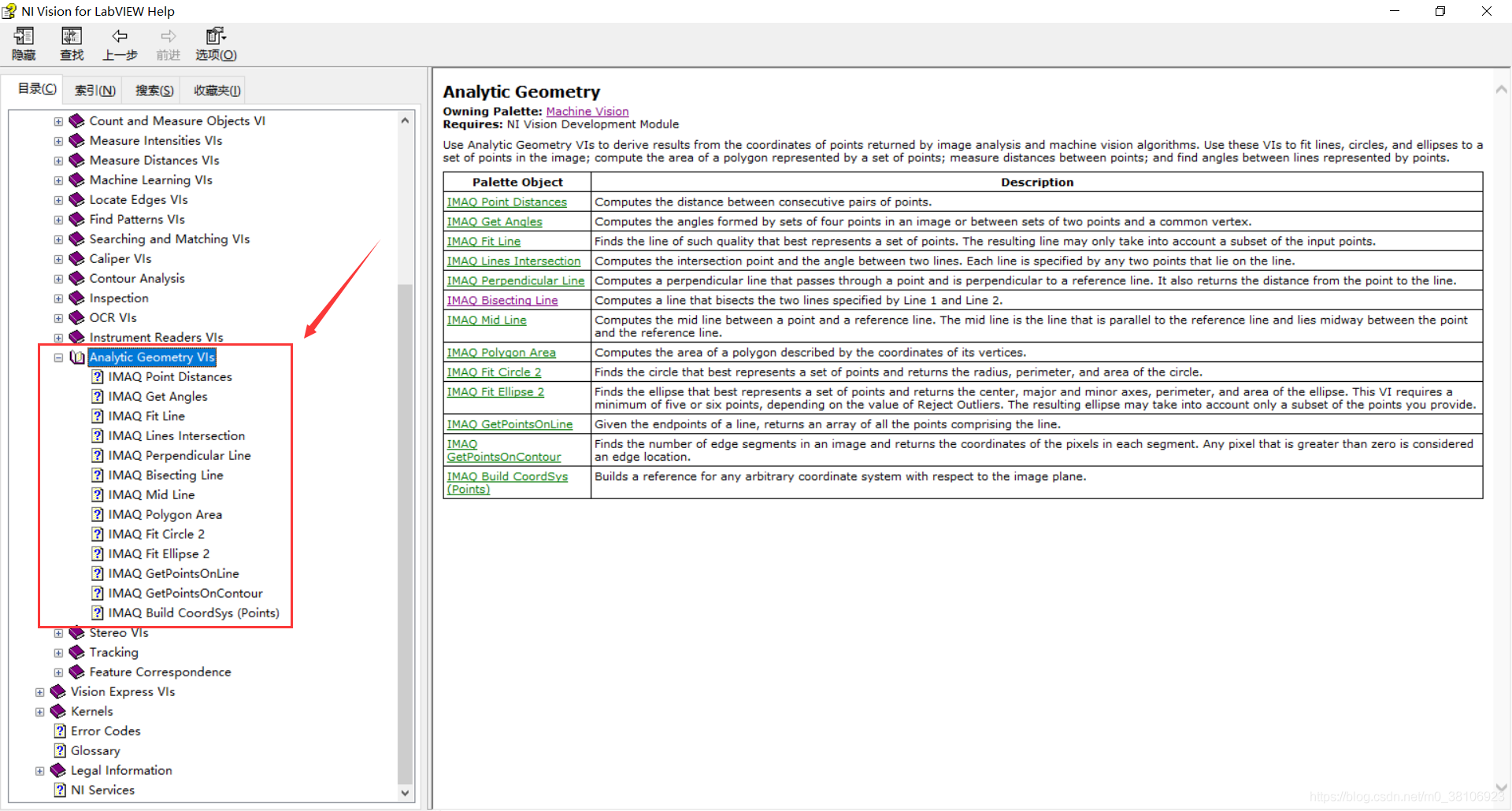
Nl Vision提供的決議幾何函式位于LabVIEW的視覺與運動→Machine Vision→Analytic Geometry函式選板中,如下圖所示:
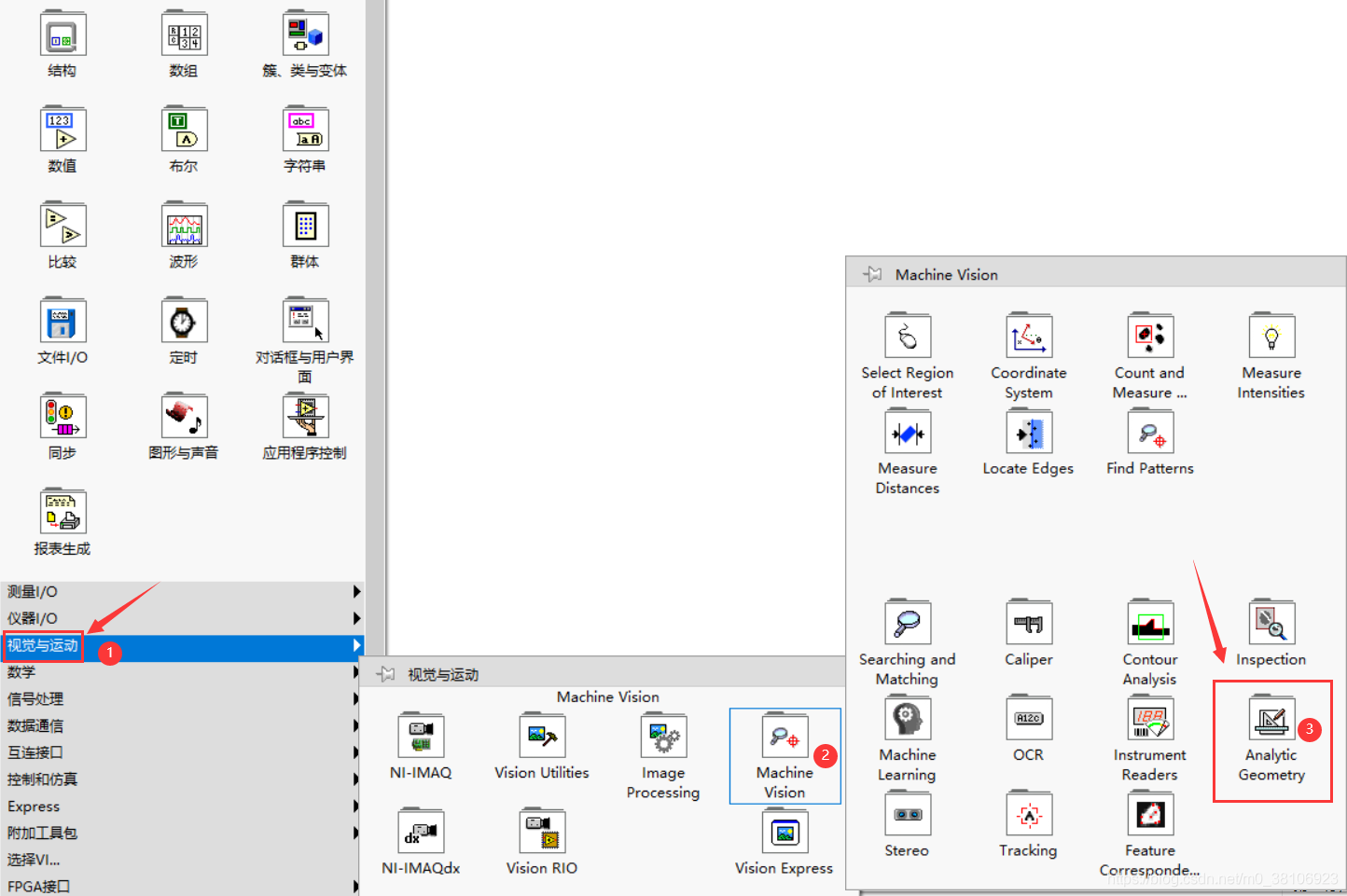
按照處理物件和計算結果不同,Nl Vision的決議幾何函式可以分為點、線、角度、面積以及曲線擬合相關的幾大類,
與像素點相關的函式IMAQ Point Distance可以計算像素與像素之間的距離,IMAQ Lines Intersection可計算兩直線的交點,IMAQ GetPointsOnLine可回傳輸入直線所覆寫的所有像素點,IMAQ GetPointsOnContour則可提取影像中的邊緣并回傳各邊緣上的像素及各邊緣的資訊,與線相關的函式IMAQ Perpendicular Line可確定一點到直線的垂直線并計算點到線的距離,IMAQ Bisecting Line可確定兩直線的平分線,IMAQ Mid Line則用來計算某一點與某一直線的平分線,
函式說明及使用可參見幫助手冊:
使用機器視覺進行目標測量的目的可大致分為兩類:一是對目標的尺寸進行度量,二是根據測量得到的尺寸資訊判斷被測件的質量,
無論出于何種目的,多數機器視覺目標測量系統最終都需要求得被測件的實際尺寸資訊,或根據被測件的實際尺寸資訊作出檢測結果的判定,這不僅要求機器視覺目標測量系統必須被校準,還要求像素解析度能最大限度地滿足測量的要求,
系統校準程序不僅可建立影像與世界坐標的關系,還能矯正系統畸變,它先建立系統的數學模型,然后再根據系統特性選擇能使真實坐標與通過模型計算得到的對應坐標的誤差平方和最小的引數,以最終確定系統的模型公式,常見的系統校準方法包括簡易校準法和點陣校準法,后者常用于對透視畸變、鏡頭徑向或切向畸變以及非線性畸變進行校準,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/291391.html
標籤:其他
下一篇:文字風格遷移