文章目錄
- RS485 通信與 Modbus 協議
- 單片機 RS485 通信介面、控制線、原理圖及程式實體
RS485 通信與 Modbus 協議
在工業控制、電力通訊、智能儀表等領域,通常情況下是采用串口通信的方式進行資料交換,最初采用的方式是 RS232 介面,由于工業現場比較復雜,各種電氣設備會在環境中產生比較多的電磁干擾,會導致信號傳輸錯誤,除此之外,RS232 介面只能實作點對點通信,不具備聯網功能,最大傳輸距離也只能達到十幾米,不能滿足遠距離通信要求,而 RS485 則解決了這些問題,資料信號采用差分傳輸方式,可以有效的解決共模干擾問題,最大距離可達1200米,并且允許多個收發設備接到同一條總線上,隨著工業應用通信越來越多,1979年施耐德電氣制定了一個用于工業現場的總線協議 Modbus 協議,現在工業中使用 RS485 通信場合很多都采用 Modbus 協議,本節課我們就來講解一下 RS485 通信和 Modbus 協議,
單片機 RS485 通信介面、控制線、原理圖及程式實體
RS232 標準是誕生于 RS485 之前的,但是 RS232 有幾處不足的地方:
- 介面的信號電平值較高,達到十幾 V,使用不當容易損壞介面芯片,電平標準也與 TTL 電平不兼容,
- 傳輸速率有局限,不可以過高,一般到一兩百千位元每秒(Kb/s)就到極限了,
- 介面使用信號線和 GND 與其它設備形成共地模式的通信,這種共地模式傳輸容易產生干擾,并且抗干擾性能也比較弱,
- 傳輸距離有限,最多只能通信幾十米,
- 通信的時候只能兩點之間進行通信,不能夠實作多機聯網通信,
針對 RS232 介面的不足,就不斷出現了一些新的介面標準,RS485 就是其中之一,它具備以下的特點:
- 采用差分信號,我們在講 A/D 的時候,講過差分信號輸入的概念,同時也介紹了差分輸入的好處,最大的優勢是可以抑制共模干擾,尤其當工業現場環境比較復雜,干擾比較多時,采用差分方式可以有效的提高通信可靠性,RS485 采用兩根通信線,通常用 A 和 B 或者 D+ 和 D- 來表示,邏輯“1”以兩線之間的電壓差為 +(0.2~6)V 表示,邏輯“0”以兩線間的電壓差為 -(0.2~6)V 來表示,是一種典型的差分通信,
- RS485 通信速率快,最大傳輸速度可以達到 10 Mb/s 以上,
- RS485 內部的物理結構,采用的是平衡驅動器和差分接收器的組合,抗干擾能力也大大增加,
- 傳輸距離最遠可以達到1200米左右,但是它的傳輸速率和傳輸距離是成反比的,只有在 100 Kb/s 以下的傳輸速度,才能達到最大的通信距離,如果需要傳輸更遠距離可以使用中繼,
- 可以在總線上進行聯網實作多機通信,總線上允許掛多個收發器,從現有的 RS485 芯片來看,有可以掛32、64、128、256等不同個設備的驅動器,
- RS485 的介面非常簡單,與 RS232 所使用的 MAX232 是類似的,只需要一個 RS485 轉換器,就可以直接與單片機的 UART 串口連接起來,并且使用完全相同的異步串行通信協議,但是由于 RS485 是差分通信,因此接收資料和發送資料是不能同時進行的,也就是說它是一種半雙工通信,那我們如何判斷什么時候發送,什么時候接收呢?
RS485 轉換芯片很多,這節課我們以典型的 MAX485 為例講解 RS485 通信,

MAX485 是美信(Maxim)推出的一款常用 RS485 轉換器,其中5腳和8腳是電源引腳;6腳和7腳就是 RS485 通信中的 A 和 B 兩個引腳;1腳和4腳分別接到單片機的 RXD 和 TXD 引腳上,直接使用單片機 UART 進行資料接收和發送;2腳和3腳是方向引腳,其中2腳是低電平使能接收器,3腳是高電平使能輸出驅動器,我們把這兩個引腳連到一起,平時不發送資料的時候,保持這兩個引腳是低電平,讓 MAX485 處于接收狀態,當需要發送資料的時候,把這個引腳拉高,發送資料,發送完畢后再拉低這個引腳就可以了,為了提高 RS485 的抗干擾能力,需要在靠近 MAX485 的 A 和 B 引腳之間并接一個電阻,這個電阻阻值從100歐到 1 K 都是可以,
在這里我們還要介紹一下如何使用 KST-51 單片機開發板進行外圍擴展實驗,我們的開發板只能把基本的功能給同學們做出來提供實驗練習,但是同學們學習的腳步不應該停留在這個實驗板上,如果想進行更多的實驗,就可以通過單片機開發板的擴展介面進行擴展實驗,大家可以看到藍綠色的單片機座周圍有32個插針,這32個插針就是把單片機的32個 IO 引腳全部都引出來了,在原理圖上體現出來的就是 J4、J5、J6、J7 這4個器件
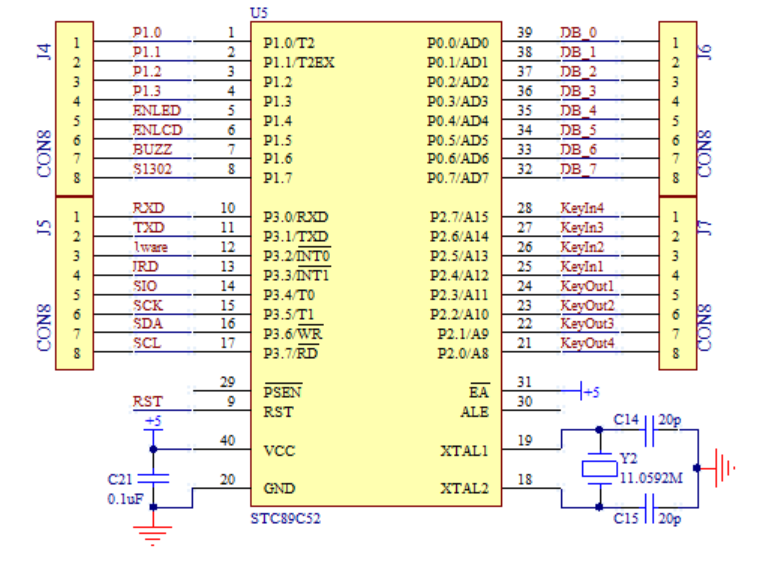
這32個 IO 口中并不是所有的都可以用來對外擴展,其中既作為資料輸出,又可以作為資料輸入的引腳是不可以用的,比如 P3.2、P3.4、P3.6 引腳,這三個引腳是不可用的,比如 P3.2 這個引腳,如果我們用來擴展,發送的信號如果和 DS18B20 的時序吻合,會導致 DS18B20 拉低引腳,影響通信,除這3個 IO 口以外的其它29個,都可以使用杜邦線接上插針,擴展出來使用,當然了,如果把當前的 IO 口應用于擴展功能了,板子上的相應功能就實作不了了,也就是說需要擴展功能和板載功能之間二選一,
在進行 RS485 實驗中,我們通信用的引腳必須是 P3.0 和 P3.1,此外還有一個方向控制引腳,我們使用杜邦線將其連接到 P1.7 上去,RS485 的另外一端,大家可以使用一個 USB 轉 RS485 模塊,用雙絞線把開發板和模塊上的 A 和 B 分別對應連起來,USB 那頭插入電腦,然后就可以進行通信了,
學習了第13章實用的串口通信方法和程式后,做這種串口通信的方法就很簡單了,基本是一致的,我們使用實用串口通信例程的思路,做了一個簡單的程式,通過串口除錯助手下發任意個字符,單片機接收到后在末尾添加“回車+換行”符后再送回,在除錯助手上重新顯示出來,先把程式貼出來,
程式中需要注意的一點是:因為平常都是將 MAX485 設定為接收狀態,只有在發送資料的時候才將 MAX485 改為發送狀態,所以在 UartWrite()函式開頭將 MAX485 方向引腳拉高,函式退出前再拉低,但是這里有一個細節,就是單片機的發送和接收中斷產生的時刻都是在停止位的一半上,也就是說每當停止位傳送了一半的時候,RI 或 TI 就已經置位并且馬上進入中斷(如果中斷使能的話)函式了,接收的時候自然不會存在問題,但發送的時候就不一樣了:當緊接著向 SBUF 寫入一個位元組資料時,UART 硬體會在完成上一個停止位的發送后,再開始新位元組的發送,但如果此時不是繼續發送下一個位元組,而是已經發送完畢了,要停止發送并將 MAX485 方向引腳拉低以使 MAX485 重新處于接收狀態時就有問題了,因為這時候最后的這個停止位實際只發送了一半,還沒有完全完成,所以就有了 UartWrite()函式內 DelayX10us(5)這個操作,這是人為的增加了 50 us 的延時,這 50 us 的時間正好讓剩下的一半停止位完成,那么這個時間自然就是由通信波特率決定的了,為波特率周期的一半,
#include <reg52.h>
#include <intrins.h>
sbit RS485_DIR = P1^7; //RS485 方向選擇引腳
bit flagFrame = 0; //幀接收完成標志,即接收到一幀新資料
bit flagTxd = 0; //單位元組發送完成標志,用來替代 TXD 中斷標志位
unsigned char cntRxd = 0; //接收位元組計數器
unsigned char pdata bufRxd[64]; //接收位元組緩沖區
extern void UartAction(unsigned char *buf, unsigned char len);
/* 串口配置函式,baud-通信波特率 */
void ConfigUART(unsigned int baud){
RS485_DIR = 0; //RS485 設定為接收方向
SCON = 0x50; //配置串口為模式 1
TMOD &= 0x0F; //清零 T1 的控制位
TMOD |= 0x20; //配置 T1 為模式 2
TH1 = 256 - (11059200/12/32)/baud; //計算 T1 多載值
TL1 = TH1; //初值等于多載值
ET1 = 0; //禁止 T1 中斷
ES = 1; //使能串口中斷
TR1 = 1; //啟動 T1
}
/* 軟體延時函式,延時時間(t*10)us */
void DelayX10us(unsigned char t){
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
/* 串口資料寫入,即串口發送函式,buf-待發送資料的指標,len-指定的發送長度 */
void UartWrite(unsigned char *buf, unsigned char len){
RS485_DIR = 1; //RS485 設定為發送
while (len--){ //回圈發送所有位元組
flagTxd = 0; //清零發送標志
SBUF = *buf++; //發送一個位元組資料
while (!flagTxd); //等待該位元組發送完成
}
DelayX10us(5); //等待最后的停止位完成,延時時間由波特率決定
RS485_DIR = 0; //RS485 設定為接收
}
/* 串口資料讀取函式,buf-接收指標,len-指定的讀取長度,回傳值-實際讀到的長度 */
unsigned char UartRead(unsigned char *buf, unsigned char len){
unsigned char i;
//指定讀取長度大于實際接收到的資料長度時,
//讀取長度設定為實際接收到的資料長度
if (len > cntRxd){
len = cntRxd;
}
for (i=0; i<len; i++){ //拷貝接收到的資料到接收指標上
*buf++ = bufRxd[i];
}
cntRxd = 0; //接收計數器清零
return len; //回傳實際讀取長度
}
/* 串口接收監控,由空閑時間判定幀結束,需在定時中斷中呼叫,ms-定時間隔 */
void UartRxMonitor(unsigned char ms){
static unsigned char cntbkp = 0;
static unsigned char idletmr = 0;
if (cntRxd > 0){ //接收計數器大于零時,監控總線空閑時間
if (cntbkp != cntRxd){ //接收計數器改變,即剛接收到資料時,清零空閑計時
cntbkp = cntRxd;
idletmr = 0;
}else{ //接收計數器未改變,即總線空閑時,累積空閑時間
if (idletmr < 30){ //空閑計時小于 30ms 時,持續累加
idletmr += ms;
if (idletmr >= 30){ //空閑時間達到 30ms 時,即判定為一幀接收完畢
flagFrame = 1; //設定幀接收完成標志
}
}
}
}else{
cntbkp = 0;
}
}
/* 串口驅動函式,監測資料幀的接收,調度功能函式,需在主回圈中呼叫 */
void UartDriver(){
unsigned char len;
unsigned char pdata buf[40];
if (flagFrame){ //有命令到達時,讀取處理該命令
flagFrame = 0;
len = UartRead(buf, sizeof(buf)-2); //將接收到的命令讀取到緩沖區中
UartAction(buf, len); //傳遞資料幀,呼叫動作執行函式
}
}
/* 串口中斷服務函式 */
void InterruptUART() interrupt 4{
if (RI){ //接收到新位元組
RI = 0; //清零接收中斷標志位
//接識訓沖區尚未用完時,保存接收位元組,并遞增計數器
if (cntRxd < sizeof(bufRxd)){
bufRxd[cntRxd++] = SBUF;
}
}
if (TI){ //位元組發送完畢
TI = 0; //清零發送中斷標志位
flagTxd = 1; //設定位元組發送完成標志
}
}
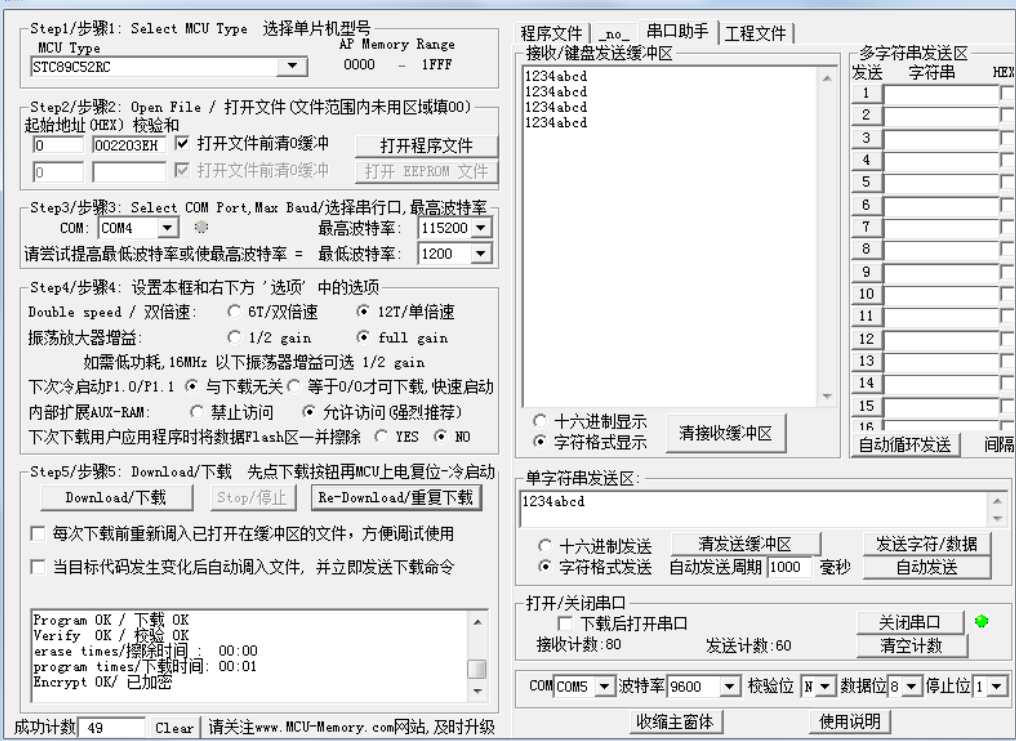
現在看這種串口程式,是不是感覺很簡單了呢?串口通信程式我們反反復復的使用,加上隨著學習的模塊越來越多,實踐的越來越多,原先感覺很復雜的東西,現在就會感到簡單了,從設備管理器里可以查看所有的 COM 口號,我們下載程式用的是 COM4,而 USB 轉 RS485 虛擬的是 COM5,通信的時候我們用的是 COM5 口,如圖
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/293815.html
標籤:其他