目錄
- 1. 從示例程式 SimpleView_FetchFrame 開始
- 程式功能
- 程式解讀
- 2. 創建自己的點云處理程式
- 檔案結構
- 創建點云
- 點云圖實時顯示完整代碼
- 3. 新建工程
- 相機型號:圖漾科技 FS820 深度相機
【引數資訊】【深度相機開發說明檔案】【SDK下載】 - 編譯環境:Ubuntu 18.04 / C++ / VS code
- 依賴庫:OpenCV + PCL
- 圖漾深度相機初步使用流程見博客,在能簡單應用相機示例程式的基礎上,對相機進行開發,以實作三維點云處理,本文實作的功能是顯示實時點云圖:

1. 從示例程式 SimpleView_FetchFrame 開始
程式功能
SimpleView_FetchFrame 是深度相機獲取影像資料并在資料獲取執行緒中進行 OpenCV 渲染的示例程式,以此為例說明影像獲取流程【影像獲取的完整流程】
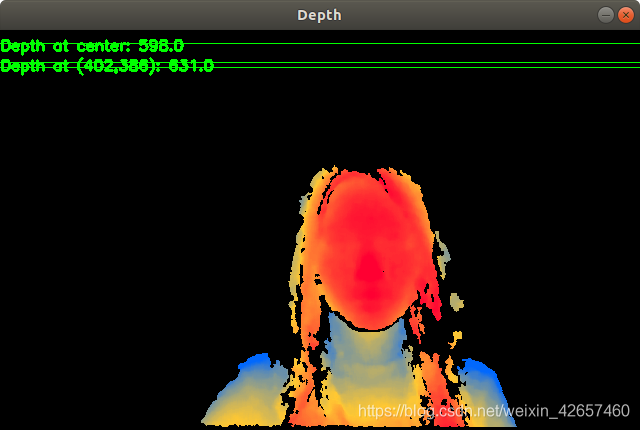
運行程式,生成 color彩色影像、depth深度影像、leftIR、rightIR 視窗
程式解讀
打開 sample/SimpleView_FetchFrame/main.cpp,解讀代碼:
從主函式開始閱讀,可以看到多個 LOGD() 函式,這些函式實作的是列印功能,相當于程式中的注釋(如 LOGD("Init lib"),說明下一段代碼的功能是初始化 API,初始化設備物件等資料結構)
對于開發者而言,我們需要關注的是如何獲取相機的資料,以進行后續的處理,也就是下圖中的 Loop 回圈部分,這一回圈的作用是不斷獲取相機的幀資料,并對資料進行處理(本例中的處理效果即為生成 color彩色影像、depth深度影像、leftIR、rightIR 視窗)
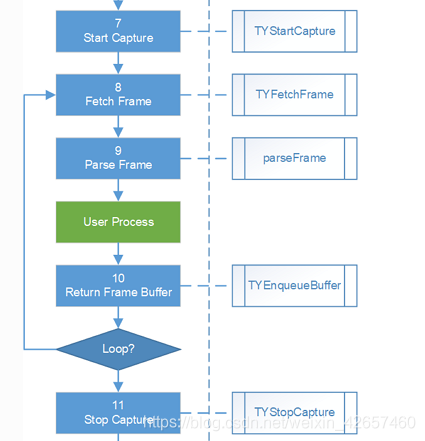
因此我們繼續往下閱讀代碼,讀到 LOGD("While loop to fetch frame") 陳述句,下面一段程式的功能就是獲取相機幀回圈,貼出代碼進行解讀:
LOGD("While loop to fetch frame");
bool exit_main = false;
TY_FRAME_DATA frame;
int index = 0;
while(!exit_main) {
int err = TYFetchFrame(hDevice, &frame, -1);
if( err == TY_STATUS_OK ) {
LOGD("Get frame %d", ++index);
int fps = get_fps();
if (fps > 0){
LOGI("fps: %d", fps);
}
cv::Mat depth, irl, irr, color;
parseFrame(frame, &depth, &irl, &irr, &color, hColorIspHandle);
if(!depth.empty()){
depthViewer.show(depth);
}
if(!irl.empty()){ cv::imshow("LeftIR", irl); }
if(!irr.empty()){ cv::imshow("RightIR", irr); }
if(!color.empty()){ cv::imshow("Color", color); }
int key = cv::waitKey(1);
switch(key & 0xff) {
case 0xff:
break;
case 'q':
exit_main = true;
break;
default:
LOGD("Unmapped key %d", key);
}
TYISPUpdateDevice(hColorIspHandle);
LOGD("Re-enqueue buffer(%p, %d)"
, frame.userBuffer, frame.bufferSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frame.userBuffer, frame.bufferSize) );
}
}
首先定義了 bool 型變數exit_main:作為回圈的標志位,while(!exit_main) 表示當 exit_main = 1 時回圈結束
- Fetch Frame
這一段代碼的功能是獲取相機的幀資訊,即 frame:
int err = TYFetchFrame(hDevice, &frame, -1);
if( err == TY_STATUS_OK ) {
LOGD("Get frame %d", ++index);
int fps = get_fps();
if (fps > 0){
LOGI("fps: %d", fps);
}
這段代碼的核心部分為:TYFetchFrame(hDevice, &frame, -1),函式功能為 Fetch one frame,即通過輸入 hDevice 這一引數,獲取一幀相機的資訊到 frame 中,如果成功獲取幀資訊,則回傳值為 TY_STATUS_OK
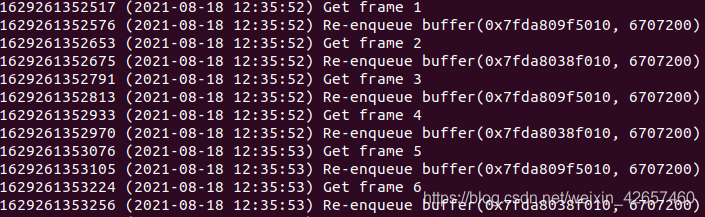
當 err == TY_STATUS_OK (成功獲取幀資訊)時,會列印資訊:Get frame + (index 的值),表示當前獲取的是第幾幀,index 在每次回圈中加1,如下圖所示:
- Parse Frame
這一段代碼的功能是決議獲取的幀資訊:
cv::Mat depth, irl, irr, color;
parseFrame(frame, &depth, &irl, &irr, &color, hColorIspHandle);
首先定義 cv::Mat 型別的深度圖 depth,彩色圖 color,左紅外影像 irl,右紅外影像 irr
接著通過 parseFrame() 函式決議 frame,分別生成深度圖、左右紅外圖和彩色圖
- User Process
在決議幀后,我們成功得到了相機的深度圖 depth 和彩色圖 color 等,用戶就可以利用獲取的資料進行處理和開發了,示例程式中實作的是簡單的影像顯示功能,即分別可視化深度圖、左右紅外圖和彩色圖:
if(!depth.empty()){
depthViewer.show(depth);
}
if(!irl.empty()){ cv::imshow("LeftIR", irl); }
if(!irr.empty()){ cv::imshow("RightIR", irr); }
if(!color.empty()){ cv::imshow("Color", color); }
int key = cv::waitKey(1);
switch(key & 0xff) {
case 0xff:
break;
case 'q':
exit_main = true;
break;
default:
LOGD("Unmapped key %d", key);
}
如果在 openCV 的圖窗中,鍵盤按下 q 鍵,則exit_main = true,整個幀回圈會結束
- Return Frame Buffer
TYISPUpdateDevice(hColorIspHandle);
LOGD("Re-enqueue buffer(%p, %d)" , frame.userBuffer, frame.bufferSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frame.userBuffer, frame.bufferSize) );
更新設備狀態,將 frame buffer 推入幀緩沖佇列
2. 創建自己的點云處理程式
檔案結構
最簡單的方式是直接在 sample 檔案夾創建一個新的檔案夾例如 point3D,并在該檔案夾中創建 main.cpp ,接著在 CMakeLists.txt 中修改以下部分即可:
set(ALL_SAMPLES
point3D # 加上自己命名的檔案夾
DumpAllFeatures
ListDevices
...
在 sample/build 目錄下打開終端,重新編譯運行即可:
cmake ..
make
cd bin
sudo ./point3D
創建點云
根據對示例程式的分析可知,通過 parseFrame(frame, &depth, &irl, &irr, &color, hColorIspHandle) 陳述句可以獲取相機的深度圖和彩色圖,處理深度圖得到位置資訊
(
x
,
y
,
z
)
(x, y, z)
(x,y,z) ,處理彩色圖得到顏色資訊
(
r
,
g
,
b
)
(r, g, b)
(r,g,b) ,最終生成包含顏色資訊的點云圖
使用 Point CLoud Library 處理點云,首先需要安裝 PCL 庫:
- 安裝 PCL 庫
sudo apt install libpcl-dev
- 修改 CMakeLists.txt 添加 PCL 庫
添加如下陳述句:
# ========================================
# === PCL
# ========================================
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
修改倒數第五行:
target_link_libraries(${sample} sample_common ${ABSOLUTE_TARGET_LIB} ${OpenCV_LIBS} ${CLOUD_VIEWER} ${PCL_LIBRARIES})
- Map depth image to 3D points
根據深度相機的標定引數,將深度圖映射為三維點云:
(1) 首先需要獲取深度相機的標定引數,根據官方檔案可知,利用 TYGetStruct() 函式即可:
TY_CAMERA_CALIB_INFO depth_calib;
TYGetStruct(hDevice, TY_COMPONENT_DEPTH_CAM
, TY_STRUCT_CAM_CALIB_DATA, &depth_calib,sizeof(depth_calib)); // 提取深度相機的標定資料
(2) 接著將深度圖轉換為三維資料:
std::vector<TY_VECT_3F> p3d; // p3d 用于存盤三維資料
TYMapDepthImageToPoint3d(&depth_calib, depth.cols, depth.rows
, (uint16_t*)depth.data, &p3d[0]); // 輸入深度資料和標定資料,輸出三維資料
p3d[i].x 表示第 i 個點的 x值;p3d[i].y 表示第 i 個點的 y值;p3d[i].z 表示第 i 個點的 z值
- Map original RGB image to depth coordinate RGB image
根據彩色相機的標定引數,將彩色圖與深度圖對齊:
(1) 首先需要獲取彩色相機的標定引數,根據官方檔案可知,利用 TYGetStruct() 函式即可:
TY_CAMERA_CALIB_INFO color_calib;
TYGetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA
, &color_calib, sizeof(color_calib)); // 提取彩色相機的標定資料
(2) 彩色圖與深度圖對齊:
首先定義函式doRgbRegister(),實作對齊功能:
// 定義一個函式 doRgbRegister(),實作對齊功能
static void doRgbRegister(const TY_CAMERA_CALIB_INFO& depth_calib
, const TY_CAMERA_CALIB_INFO& color_calib
, const cv::Mat& depth
, const cv::Mat& color
, cv::Mat& out
)
{
// do rgb undistortion
TY_IMAGE_DATA src;
src.width = color.cols;
src.height = color.rows;
src.size = color.size().area() * 3;
src.pixelFormat = TY_PIXEL_FORMAT_RGB;
src.buffer = color.data;
cv::Mat undistort_color = cv::Mat(color.size(), CV_8UC3);
TY_IMAGE_DATA dst;
dst.width = color.cols;
dst.height = color.rows;
dst.size = undistort_color.size().area() * 3;
dst.buffer = undistort_color.data;
dst.pixelFormat = TY_PIXEL_FORMAT_RGB;
TYUndistortImage(&color_calib, &src, NULL, &dst);
// do register
out.create(depth.size(), CV_8UC3);
TYMapRGBImageToDepthCoordinate(
&depth_calib,
depth.cols, depth.rows, depth.ptr<uint16_t>(),
&color_calib,
undistort_color.cols, undistort_color.rows, undistort_color.ptr<uint8_t>(),
out.ptr<uint8_t>());
}
在主函式中呼叫函式doRgbRegister():
cv::Mat color_data_mat; // color_data_mat 為對齊后的彩色圖
if (!color.empty())
{
bool hasColorCalib;
TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA, &hasColorCalib); // 查詢有無彩色相機標定引數這一屬性
if (hasColorCalib)
{
doRgbRegister(depth_calib, color_calib, depth, color, color_data_mat); // 輸入深度相機標定資料、彩色相機標定資料、深度圖和彩色圖,輸出對齊后的彩色圖
cv::cvtColor(color_data_mat, color_data_mat, cv::COLOR_BGR2RGB); // BGR 格式轉換為 RGB 格式
}
}
- 生成 PointXYZRGB 型別點云(核心代碼)
pcl::PointCloud<pcl::PointXYZRGB> cloud; // 生成的點云 cloud
pcl::PointXYZRGB point;
for (int m = 0; m < depth.rows; m++)
{
for (int n=0; n < depth.cols; n++)
{
point.x = p3d[(m*(depth.cols)+n)].x;
point.y = p3d[(m*(depth.cols)+n)].y;
point.z = p3d[(m*(depth.cols)+n)].z;
point.r = color_data_mat.at<cv::Vec3b>(m, n)[0];
point.g = color_data_mat.at<cv::Vec3b>(m, n)[1];
point.b =color_data_mat.at<cv::Vec3b>(m, n)[2];
cloud.points.push_back(point); // 構造xyzrgb型別點云
}
}
cloud.width = (uint32_t)cloud.points.size();
cloud.height = 1;
- 點云可視化
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer1(new pcl::visualization::PCLVisualizer("3D Viewer"));
pcl::PointCloud<pcl::PointXYZRGB>::Ptr basic_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
basic_cloud_ptr = cloud.makeShared(); // 轉換為指標格式 basic_cloud_ptr
basic_cloud_ptr->is_dense = false; // 自己創建的點云,默認為dense,需要修改屬性,否則removenanfrompointcloud函式無效
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
std::vector<int> mapping;
pcl::removeNaNFromPointCloud(*basic_cloud_ptr, *cloud_ptr, mapping); // 移除無效點
viewer1->removeAllPointClouds(); // 移除當前所有點云
viewer1->addPointCloud<pcl::PointXYZRGB> (cloud_ptr, "initial");
viewer1->updatePointCloud(cloud_ptr, "initial");
viewer1->spinOnce(100);
點云圖實時顯示完整代碼
#include <TYApi.h>
#include "TYImageProc.h"
#include "../common.hpp"
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/filters/filter.h>
#include <pcl/common/impl/io.hpp>
static void doRgbRegister(const TY_CAMERA_CALIB_INFO& depth_calib, const TY_CAMERA_CALIB_INFO& color_calib, const cv::Mat& depth, const cv::Mat& color, cv::Mat& out)
{
// do rgb undistortion
TY_IMAGE_DATA src;
src.width = color.cols;
src.height = color.rows;
src.size = color.size().area() * 3;
src.pixelFormat = TY_PIXEL_FORMAT_RGB;
src.buffer = color.data;
cv::Mat undistort_color = cv::Mat(color.size(), CV_8UC3);
TY_IMAGE_DATA dst;
dst.width = color.cols;
dst.height = color.rows;
dst.size = undistort_color.size().area() * 3;
dst.buffer = undistort_color.data;
dst.pixelFormat = TY_PIXEL_FORMAT_RGB;
ASSERT_OK(TYUndistortImage(&color_calib, &src, NULL, &dst));
// do register
out.create(depth.size(), CV_8UC3);
ASSERT_OK(
TYMapRGBImageToDepthCoordinate(
&depth_calib,
depth.cols, depth.rows, depth.ptr<uint16_t>(),
&color_calib,
undistort_color.cols, undistort_color.rows, undistort_color.ptr<uint8_t>(),
out.ptr<uint8_t>()));
}
void eventCallback(TY_EVENT_INFO *event_info, void *userdata)
{
if (event_info->eventId == TY_EVENT_DEVICE_OFFLINE) {
LOGD("=== Event Callback: Device Offline!");
// Note:
// Please set TY_BOOL_KEEP_ALIVE_ONOFF feature to false if you need to debug with breakpoint!
}
else if (event_info->eventId == TY_EVENT_LICENSE_ERROR) {
LOGD("=== Event Callback: License Error!");
}
}
int main(int argc, char* argv[])
{
std::string ID, IP;
TY_INTERFACE_HANDLE hIface = NULL;
TY_ISP_HANDLE hColorIspHandle = NULL;
TY_DEV_HANDLE hDevice = NULL;
int32_t color, ir, depth;
color = ir = depth = 1;
for(int i = 1; i < argc; i++) {
if(strcmp(argv[i], "-id") == 0){
ID = argv[++i];
} else if(strcmp(argv[i], "-ip") == 0) {
IP = argv[++i];
} else if(strcmp(argv[i], "-color=off") == 0) {
color = 0;
} else if(strcmp(argv[i], "-depth=off") == 0) {
depth = 0;
} else if(strcmp(argv[i], "-ir=off") == 0) {
ir = 0;
} else if(strcmp(argv[i], "-h") == 0) {
LOGI("Usage: SimpleView_FetchFrame [-h] [-id <ID>] [-ip <IP>]");
return 0;
}
}
LOGD("Init lib");
ASSERT_OK( TYInitLib() );
TY_VERSION_INFO ver;
ASSERT_OK( TYLibVersion(&ver) );
LOGD(" - lib version: %d.%d.%d", ver.major, ver.minor, ver.patch);
std::vector<TY_DEVICE_BASE_INFO> selected;
ASSERT_OK( selectDevice(TY_INTERFACE_ALL, ID, IP, 1, selected) );
ASSERT(selected.size() > 0);
TY_DEVICE_BASE_INFO& selectedDev = selected[0];
ASSERT_OK( TYOpenInterface(selectedDev.iface.id, &hIface) );
ASSERT_OK( TYOpenDevice(hIface, selectedDev.id, &hDevice) );
int32_t allComps;
ASSERT_OK( TYGetComponentIDs(hDevice, &allComps) );
///try to enable color camera
if(allComps & TY_COMPONENT_RGB_CAM && color) {
LOGD("Has RGB camera, open RGB cam");
ASSERT_OK( TYEnableComponents(hDevice, TY_COMPONENT_RGB_CAM) );
//create a isp handle to convert raw image(color bayer format) to rgb image
ASSERT_OK(TYISPCreate(&hColorIspHandle));
//Init code can be modified in common.hpp
//NOTE: Should set RGB image format & size before init ISP
ASSERT_OK(ColorIspInitSetting(hColorIspHandle, hDevice));
//You can call follow function to show color isp supported features
#if 0
ColorIspShowSupportedFeatures(hColorIspHandle);
#endif
//You can turn on auto exposure function as follow ,but frame rate may reduce .
//Device may be casually stucked 1~2 seconds while software is trying to adjust device exposure time value
#if 0
ASSERT_OK(ColorIspInitAutoExposure(hColorIspHandle, hDevice));
#endif
}
if (allComps & TY_COMPONENT_IR_CAM_LEFT && ir) {
LOGD("Has IR left camera, open IR left cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_LEFT));
}
if (allComps & TY_COMPONENT_IR_CAM_RIGHT && ir) {
LOGD("Has IR right camera, open IR right cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_RIGHT));
}
//try to enable depth map
LOGD("Configure components, open depth cam");
if (allComps & TY_COMPONENT_DEPTH_CAM && depth) {
int32_t image_mode;
ASSERT_OK(get_default_image_mode(hDevice, TY_COMPONENT_DEPTH_CAM, image_mode));
LOGD("Select Depth Image Mode: %dx%d", TYImageWidth(image_mode), TYImageHeight(image_mode));
ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, image_mode));
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_DEPTH_CAM));
//depth map pixel format is uint16_t ,which default unit is 1 mm
//the acutal depth (mm)= PixelValue * ScaleUnit
}
LOGD("Prepare image buffer");
uint32_t frameSize;
ASSERT_OK( TYGetFrameBufferSize(hDevice, &frameSize) );
LOGD(" - Get size of framebuffer, %d", frameSize);
LOGD(" - Allocate & enqueue buffers");
char* frameBuffer[2];
frameBuffer[0] = new char[frameSize];
frameBuffer[1] = new char[frameSize];
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[0], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[0], frameSize) );
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[1], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[1], frameSize) );
LOGD("Register event callback");
ASSERT_OK(TYRegisterEventCallback(hDevice, eventCallback, NULL));
bool hasTrigger;
ASSERT_OK(TYHasFeature(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &hasTrigger));
if (hasTrigger) {
LOGD("Disable trigger mode");
TY_TRIGGER_PARAM trigger;
trigger.mode = TY_TRIGGER_MODE_OFF;
ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
}
LOGD("Start capture");
ASSERT_OK( TYStartCapture(hDevice) );
LOGD("While loop to fetch frame");
TY_FRAME_DATA frame;
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer1(new pcl::visualization::PCLVisualizer("3D Viewer"));
while(!viewer1->wasStopped()){
int err = TYFetchFrame(hDevice, &frame, -1);
cv::Mat depth, irl, irr, color;
parseFrame(frame, &depth, &irl, &irr, &color, hColorIspHandle);
std::vector<TY_VECT_3F> p3d;
TY_CAMERA_CALIB_INFO depth_calib;
TY_CAMERA_CALIB_INFO color_calib;
pcl::PointCloud<pcl::PointXYZRGB> cloud;
pcl::PointXYZRGB point;
p3d.resize(depth.size().area());
TYGetStruct(hDevice, TY_COMPONENT_DEPTH_CAM, TY_STRUCT_CAM_CALIB_DATA, &depth_calib, sizeof(depth_calib)); // 提取深度相機的標定資料
TYGetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA, &color_calib, sizeof(color_calib)); // 提取RGB相機的標定資料
TYMapDepthImageToPoint3d(&depth_calib, depth.cols, depth.rows, (uint16_t*)depth.data, &p3d[0]); // 深度影像->xyz點云
cv::Mat color_data_mat;
if (!color.empty())
{
bool hasColorCalib;
TYHasFeature(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA, &hasColorCalib);
if (hasColorCalib)
{
doRgbRegister(depth_calib, color_calib, depth, color, color_data_mat);
cv::cvtColor(color_data_mat, color_data_mat, cv::COLOR_BGR2RGB);
}
}
for (int m = 0; m < depth.rows; m++)
{
for (int n=0; n < depth.cols; n++)
{
point.x = p3d[(m*(depth.cols)+n)].x;
point.y = p3d[(m*(depth.cols)+n)].y;
point.z = p3d[(m*(depth.cols)+n)].z;
point.r = color_data_mat.at<cv::Vec3b>(m, n)[0];
point.g = color_data_mat.at<cv::Vec3b>(m, n)[1];
point.b =color_data_mat.at<cv::Vec3b>(m, n)[2];
cloud.points.push_back(point); // 構造xyzrgb型別點云
}
}
cloud.width = (uint32_t)cloud.points.size();
cloud.height = 1;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr basic_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
basic_cloud_ptr = cloud.makeShared(); // 轉換為指標格式 basic_cloud_ptr
basic_cloud_ptr->is_dense = false; // 自己創建的點云,默認為dense,需要修改屬性,否則removenanfrompointcloud函式無效
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
std::vector<int> mapping;
pcl::removeNaNFromPointCloud(*basic_cloud_ptr, *cloud_ptr, mapping); // 移除無效點
viewer1->removeAllPointClouds(); // 移除當前所有點云
viewer1->addPointCloud<pcl::PointXYZRGB> (cloud_ptr, "initial");
viewer1->updatePointCloud(cloud_ptr, "initial");
viewer1->spinOnce(100);
TYISPUpdateDevice(hColorIspHandle);
LOGD("Re-enqueue buffer(%p, %d)", frame.userBuffer, frame.bufferSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frame.userBuffer, frame.bufferSize));
}
ASSERT_OK( TYStopCapture(hDevice) );
ASSERT_OK( TYCloseDevice(hDevice) );
ASSERT_OK( TYCloseInterface(hIface) );
ASSERT_OK(TYISPRelease(&hColorIspHandle));
ASSERT_OK( TYDeinitLib() );
LOGD("Main done!");
return 0;
}
3. 新建工程
如果不想使用官方 SDK 的檔案結構,自己新建一個專案,可以新建工程檔案夾 TYCamera,檔案結構如圖:
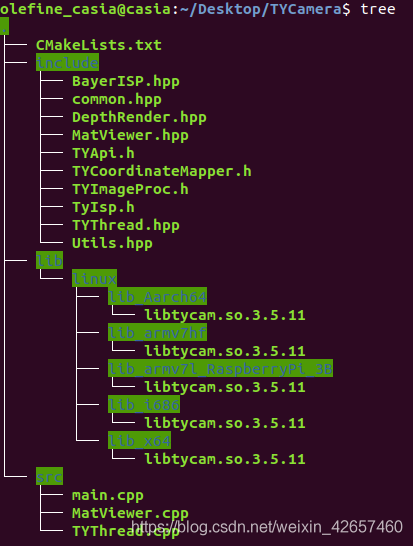
除了 CMakeLists.txt 和 main.cpp,其他的檔案都可以直接從官方 SDK 中拷貝,main.cpp 即為上一節中的點云圖實時顯示完整代碼
CMakeLists.txt 修改為:
(可以正常運行,但我對 cmake 不是很熟悉,寫法上可能有不規范之處)
cmake_minimum_required(VERSION 2.8)
project(rgbd_camera)
if (NOT TARGET tycam)
#only build samples
option (OpenCV_STATIC OFF)
set(INCLUDE_PATH include)
include_directories(${INCLUDE_PATH})
set(ABSOLUTE_TARGET_LIB tycam)
add_library(${ABSOLUTE_TARGET_LIB} SHARED IMPORTED)
if(ARCH)
set_property(TARGET ${ABSOLUTE_TARGET_LIB} PROPERTY IMPORTED_LOCATION ${CMAKE_CURRENT_SOURCE_DIR}/../lib/linux/lib_${ARCH}/libtycam.so)
else()
set(ABSOLUTE_TARGET_LIB -ltycam)
endif()
endif()
# ========================================
# === common, build static lib to speed up
# ========================================
set(COMMON_SOURCES src/MatViewer.cpp src/TYThread.cpp)
add_library(sample_common STATIC ${COMMON_SOURCES})
if(UNIX)
target_link_libraries(sample_common pthread)
endif()
# ========================================
# === OpenCV
# ========================================
set(OpenCV_DIR "/home/olefine_casia/opencv-4.5.1/build/")
find_package(OpenCV REQUIRED)
if (NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV library not found")
else()
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${OpenCV2_INCLUDE_DIRS})
# if(CMAKE_BUILD_TYPE STREQUAL Debug)
# link_directories(${OpenCV_LIB_DIR_DBG})
# else()
# link_directories(${OpenCV_LIB_DIR_OPT})
# endif()
link_directories(${OpenCV_LIB_DIR})
endif()
# ========================================
# === PCL
# ========================================
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
aux_source_directory(./src/ DIR_SRCS)
add_executable(rgbd_camera ${DIR_SRCS})
include_directories (
${CMAKE_CURRENT_SOURCE_DIR}/include
)
target_link_libraries(rgbd_camera
${ABSOLUTE_TARGET_LIB} ${OpenCV_LIBS} ${PCL_LIBRARIES}
)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/295039.html
標籤:其他