一、安裝二維碼識別的功能包
sudo apt-get install ros-melodic-ar-track-alvar
知識點:通過 sudo apt-get install ros-版本-XXX 的形式所安裝的功能包都存放在opt/ros/版本/share的路徑下,
二、創建自定義的二維碼
rosrun ar_track_alvar createMarker -s 二維碼邊長(單位厘米) 內容

輸入上面的命令后會生成一張二維碼,并且存放在主目錄下,
三、二維碼識別
啟動標定好的攝像頭
roslaunch robot_vision usb_cam_with_calibration.launch
啟動二維碼識別程式
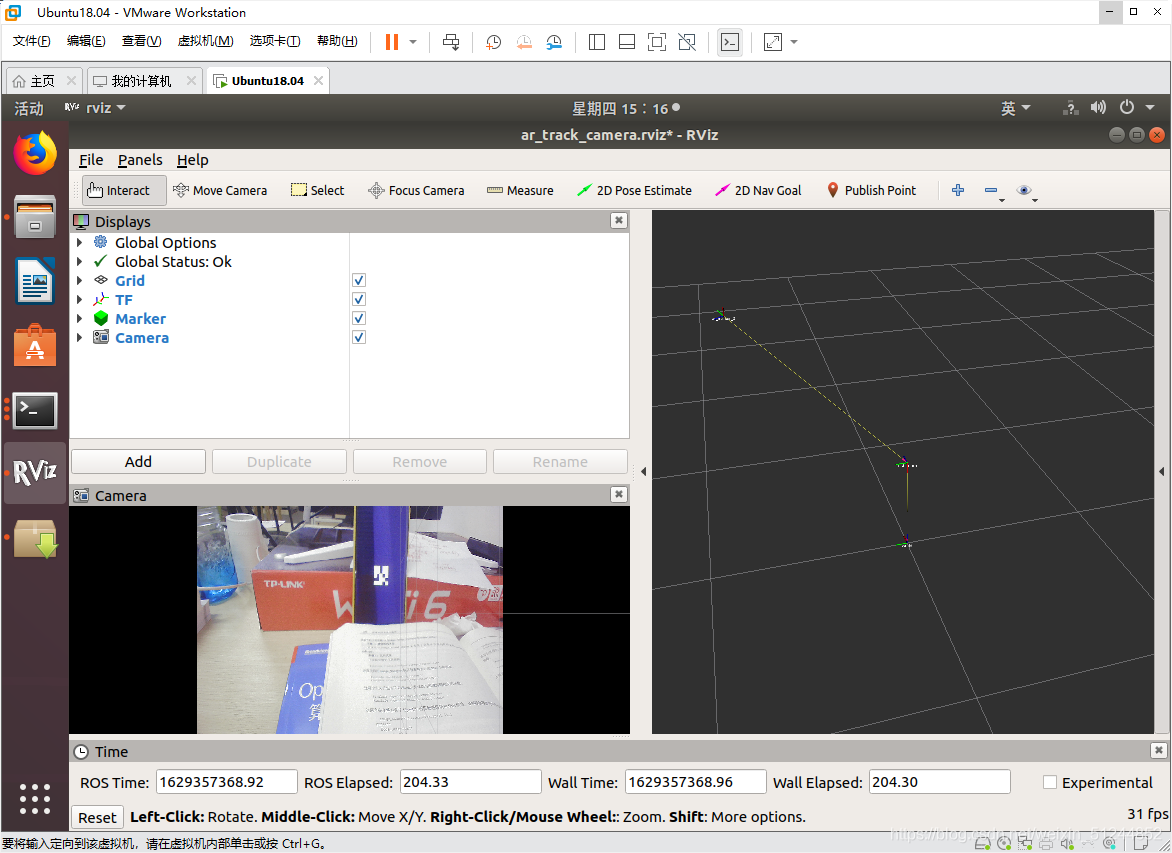
相機對著二中生成的二維碼,可以實作2D單目相機對二維碼的三維定位,
roslaunch robot_vision ar_track_camera.launch
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/295073.html
標籤:AI
上一篇:OPENCV圖片批量更換文字