目錄
1.官網下載CoppeliaSim_Edu_V4_1_0_Ubuntu18_04
2.安裝ROS
3.安裝catkin
本文講述本人在安裝CoppeliaSim的時候所遇到的各種問題以及解決辦法,此外這是本人第一次嘗試通過博客來分享自己學到的東西,如有錯誤煩請讀者指出,
1.官網下載CoppeliaSim_Edu_V4_1_0_Ubuntu18_04
先到Coppeliasim官網下載所需版本的Coppeliasim,我這里下載的是CoppeliaSim_Edu_V4_1_0_Ubuntu18_04版本,(我一開始打算下載4.2.0版本,但是在后續的程序中會報錯,所以我就只下載了4.1.0的)此外,學長建議下載Edu版本的,因為Edu版本比player版本功能更多一些,
在等待下載完成的時候我們可以先創建一個檔案夾來存放coppeliasim:
mkdir -p sim_ws/src
下載完成后解壓并將解壓好的coppeliasim檔案直接拖的src檔案中,
此時在終端進入安裝好的coppeliasim檔案夾下,輸入./coppeliaSim.sh就可以打開coppeliasim看到打開效果:
2.安裝ROS
現在的Coppeliasim雖然可以運行,但是并不能進行ROS通信,需要搭建bridge:
cd ~/sim_ws/src
git clone --recursive https://github.com/CoppeliaRobotics/simExtROS.git sim_ros_interface
#如果clone的時候報錯,可以嘗試多試幾次
cd sim_ros_interface
git checkout coppeliasim-v4.1.0
cd ~/sim_ws
catkin build -j4最開始不是說安裝4.2.0版本會報錯嘛(會說什么找不到Coppeliasim 4.1.0啥的),這里解釋一下,
#上面的代碼中有一句為:
git clone --recursive https://github.com/CoppeliaRobotics/simExtROS.git sim_ros_interface我們進入到鏈接(GitHub - CoppeliaRobotics/simExtROS)中可以看到:
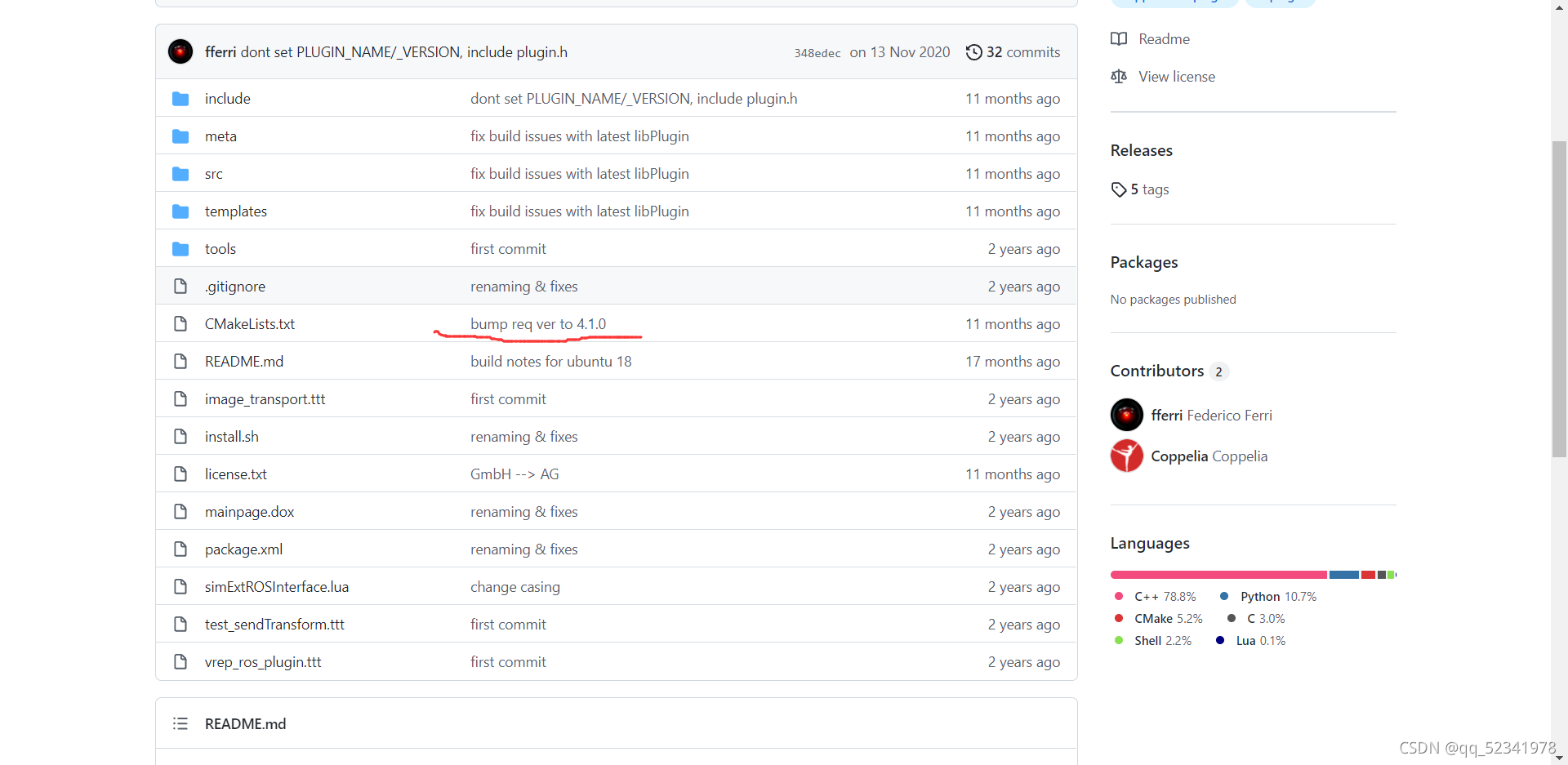
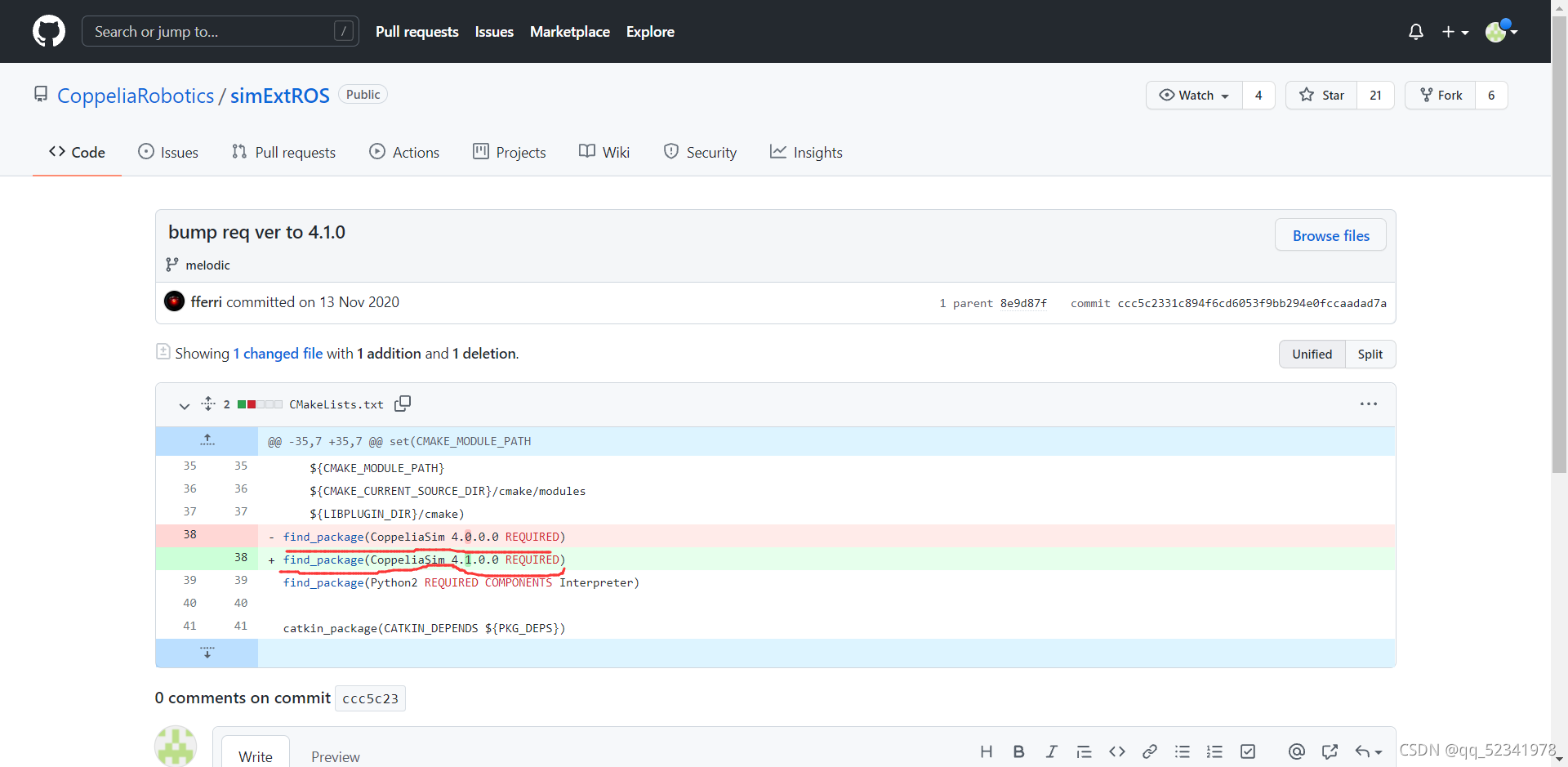
上面顯示現在只能find_package(CoppeliaSim 4.1.0.0 REQUIRED),所以裝4.2.0的時候會報錯,
如果成功執行完畢(即執行catkin build -j4之后不報錯),就可以不再往下看了,
如果在執行catkin build -j4時,報錯說沒有catkin這個命令,則繼續往下看第三部分,
3.安裝catkin
由于這一塊都是自己摸索的,所以可能中間會有問題,比如說下面的兩段代碼,雖然我都執行了,但可能只需要執行第二段就可以了(我只是說可能哈),有問題的話煩請大家指出,
如果在執行catkin的時候報錯說找不到catkin表明沒有catkin,這時候就需要下載catkin,這里我采用catkin命令安裝_二毛的博客-CSDN博客_catkin安裝中的做法:
sudo apt-get update
sudo apt-get install python-catkin-tools
catkin init我按照上述代碼執行的時候報錯:Ubuntu中安裝ROS提示無法定位軟體包,然后我采用了文章Ubuntu中安裝ROS提示無法定位軟體包_zyc_csdn的博客-CSDN博客中的的做法,將軟體源換成國內的再下載.(PS,由于文章中的密匙好像失效了,我就在網上找了其他的密匙來替換),代碼綜合起來如下:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv F42ED6FBAB17C654
#如果這個密匙也不行的話可以到網上搜其他的
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
在執行sudo rosdep init和rosdep update的時候有可能會報如下錯誤:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
為解決上述錯誤, 我采用rosdep init/update 解決方法_CCsherlock的博客-CSDN博客提到的方法來解決,最后就可以成功的rosdep update了,(PS,這里前半段的操作就是為了避免rosdep init所帶來的報錯,所以最后就沒有rosdep init而是直接rosdep update)
此外,我在運行source ~/.bashrc 的時候遇到了問題說找不到 source /opt/ros/melodic/setup.bash檔案,網上找了都沒有解決,最后我到melodic檔案夾下面看了一下,原來是沒有setup.bash檔案,所以我直接重新執行了sudo apt-get install ros-melodic-desktop-full,然后就不報錯了,
現在應該就可以執行catkin build -j4啦,
參考文章:??????CoppeliaSim學習筆記之CoppeliaSim Edu V4.1.0 + Ubuntu 16.04 + ROS Kinetic環境搭建與基礎測驗_知不道道不知知不知道道道知的博客-CSDN博客_coppeliasim edu
Ubuntu中安裝ROS提示無法定位軟體包_zyc_csdn的博客-CSDN博客
rosdep init/update 解決方法_CCsherlock的博客-CSDN博客
catkin命令安裝_二毛的博客-CSDN博客_catkin安裝
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/312262.html
標籤:其他