
想法來源
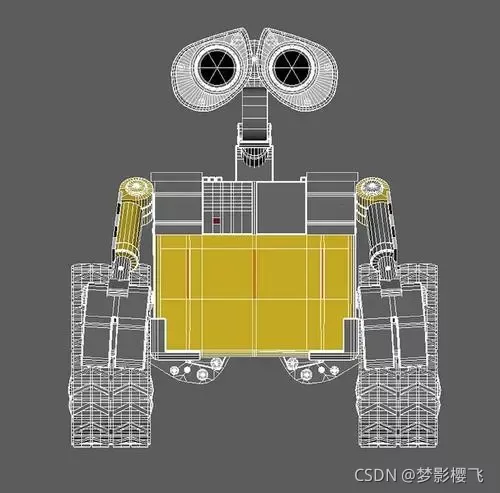
此想法來源于電影《機器人總動員》中的“瓦力”這一形象,電影中的瓦力就以一個可以自行移動的垃圾清理機器人,我產生這一想法的原因是,我們的實驗室中已經有相對應的雛形,智能垃圾桶專案已經成熟,智能小車專案也在發展中(硬體設施已具備),果園采摘機器人專案我們只需要使用其機械臂并對其進行改造即可,
在一個專案開發專案的開發中,我們清楚地知道,一代產品根本無法滿足我們設計的需要,所以目前我們只針對第一代產品進行初步的設計,我們對第一代產品的設想就是它可以滿足:1、可以自行移動、自動避障;2、可以主動抓取垃圾;3、可以自動進行垃圾分類,滿足了這三點,我們的第一代產品的設計就算是成功了,
一、可以自行移動、自動避障
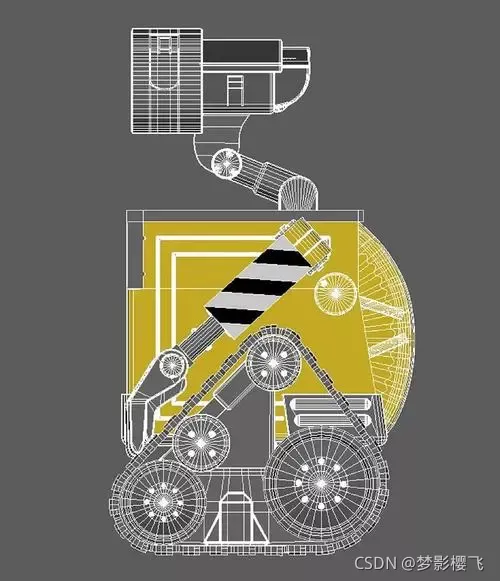
這個專案往簡單了來看,就是小車+垃圾桶+機械臂,如果想讓垃圾桶實作自行移動、自動避障,首先我們需要一個小車底盤,對于小車底盤的最基本要求就是輪子必須足夠大但又不能太大,然后就是動力足,我們在設計試驗階段首先選用一款直流減速電機,來給垃圾清理機器人提供一個十分可靠的動力,為了可以使它適應全地形運動,經過小組研究討論,把輪式的小車底盤改裝成履帶式的小車底盤,履帶式的小車底盤就可以讓我們的機器人在一定的條件下進行全地形的運動,(這是針對于一般的臺階來說的,只需要讓履帶的前端可以高于臺階,在動力足夠的情況下只需要有受力點,我們的機器人就可以爬上臺階,而輪式的小車我們必須讓輪子軸心的高度高于臺階的高度在動力足夠的情況下才有可能爬上臺階,另一方面,輪式車可能會在濕滑的路面上出現打滑的情況,而履帶式則可以適應絕大多數路面情況,)我們在使用履帶式的底盤結構的同時,還需要把機器人的重心降低,至少機器人前部的重心必須降低,防止在車身傾斜嚴重的情況下出現后翻、側傾的情況,另外,我們通過STM32單片機控制傳感器使其擁有超聲波避障和紅外避障的功能,這樣就可以在一個靜態的環境情況下達到規避障礙物的效果,
未來對機器人的設想是可以通過視覺完成一切的避障操作,
二、可以自動抓取垃圾
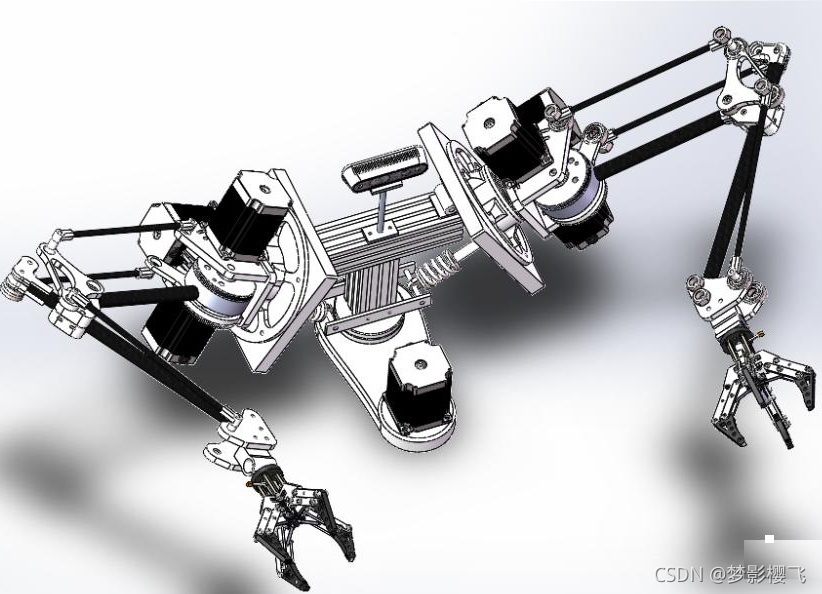
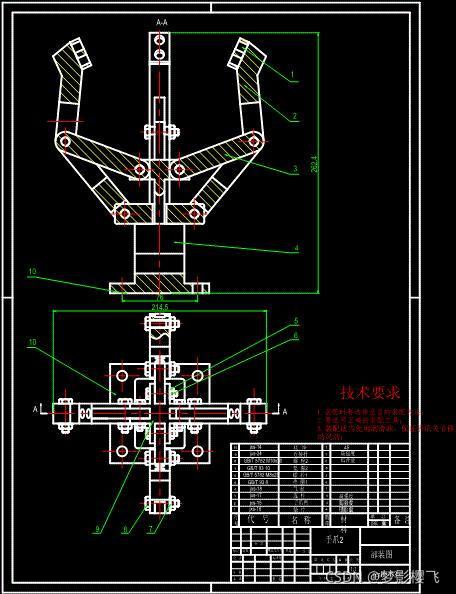
需要做到這一點我就必須得采用機械臂,機械臂上得安裝有溫度傳感器、測距模塊,便于對垃圾進行精準定位,
機械臂只是對抓取的垃圾物件進行方向和位置的控制,這是相對簡單的操作,要考慮的主要問題筆者覺得應該是抓取垃圾的大小和重量,目前在實驗室階段我們只能把目光投放在體積小重量輕的垃圾身上,例如:紙團、果皮、易拉罐、電池等,如果可以做到可以根據不同垃圾的分量去決定夾取的力度就更好了,但是換個角度想一下,我們抓取的物件是垃圾,只要是不對我們的機械臂造成損傷,也能抓起來垃圾就已經滿足一個垃圾清理機器人的所需要的條件了,
三、可以自動進行垃圾分類
垃圾分類對于垃圾分類機器人來說這是個核心技術,
一開始的想法是在機械臂上安裝攝像頭分辨垃圾的種類,直接分類,避免再到桶內進行分類,增大垃圾桶的體型,之前的設想是直接把垃圾放到桶內,在桶內通過攝像頭識別垃圾種類再通過云臺對垃圾進行分類;現在覺得這種設計對于機器人來說會在一定程度上增大機器人的體型,使機器人顯得格外的笨重,所以就把攝像頭的視覺模塊放在機械臂上直接在機械臂上完成對垃圾進行分類的操作,
對于垃圾分類,采用深度學習來完成,根據以往的對垃圾分類的經歷來說,在積累垃圾圖片庫時,一定要多花時間,多找一些圖片,盡量不在百度等搜索引擎上搜索,也不要用爬蟲,因為這樣找到的圖片看似很多,但是大部分都是一樣的,對于我們視覺來說不是一件好事情,不如麻煩一些,多找些朋友去為你搜集各種垃圾的圖片,這樣你可以拍到垃圾各種情況下的照片,雖然很麻煩,但是對于提高垃圾分類準確度來說太實用了,另外,資源越大越好,越真實越好,想想如果給你20G的資源,垃圾分類的準確度至少能提到95%,
結束語
筆者在這里僅僅是分享一下自己的想法,并沒有實際操作,也沒有技術指導,如果覺得可以實作,歡迎評論,同時也歡迎大家提出自己的設計靈感,可以的話大家可以一起實作,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/321494.html
標籤:其他
下一篇:python-語音識別