一、利用protobuf通信原理
最近專案中需要用到stm32與Orange Pi(移植了linux)進行資料互動,H6端是用C++撰寫的串口底層驅動,與stm32的串口連接并通信,串口間的通信協議定為采用protobuf打包資料并通過串口發出的形式,即發送端編碼資料并序列化成陣列通過串口發出,接收端接收到一幀資料,進行解碼并決議資料,
二、 移植protobuf(nanopb-0.3.8)到stm32工程
protobuf是一種打包資料的工具,和JSON打包資料的作用是一樣的,在C++下用protobuf傳遞資料,要先寫一個.proto檔案,然后在linux環境下編譯該檔案,或者直接放在CMake里面編譯,便可以生成出來一個類(.cpp 和 .h),利用protobuf打包便是打包這個類,
可以理解成把這個類的所有資料加上幀頭幀尾幀校驗,然后通過串口,網路等通信格式將資料發送出去,這個程序稱為序列化,解包就是把收到序列化的資料反序列化,然后把有效資料放入生成的類中,
一般開發stm32的環境是在Windows下,基于Keil開發,要通過.proto檔案生成結構體(.c和.h)需要下載一個官方protobuf的輪子,然后在命令列下編譯即可生成我們需要的結構體檔案,這個輪子的下載地址放在文末,
三、撰寫.proto檔案
撰寫.proto檔案很簡單,開頭先寫protobuf的版本號,和包名(命名空間)
// A very simple protocol definition, consisting of only
// one message.
// 02
syntax = "proto3";
package STM32;
然后寫message,就和寫結構體(列舉)的格式很相似,
message GyroOffset
{
float gyrooffsetX = 1;
float gyrooffsetY = 2;
float gyrooffsetZ = 3;
}
message GyroAccData
{
uint32 accX = 1; //加速度計x軸加速度
uint32 accY = 2; //加速度計y軸加速度
uint32 accZ = 3; //加速度計z軸加速度
uint32 gryoX = 4; //陀螺儀x軸原始資料
uint32 gryoY = 5; //陀螺儀y軸原始資料
uint32 gryoZ = 6; //陀螺儀z軸原始資料
}
message IsGetGyroOffset
{
bool IsGetStatus = 1;
}
message Bmi160ToData
{
GyroOffset gyroOffset = 1;
GyroAccData gyroAccData = 2;
IsGetGyroOffset isGetGyroOffset = 3;
}
到這里為止,我們最終只需要Bmi160ToData這個結構體中包含的資料即可,
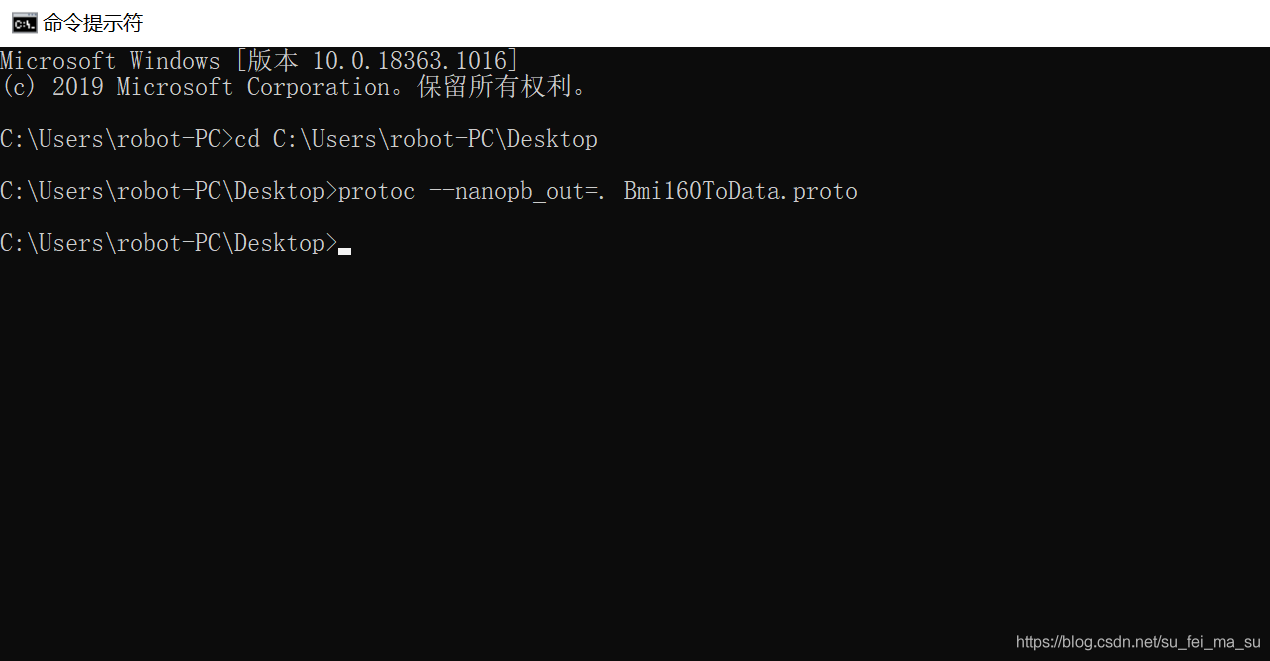
寫完以后我們把.proto檔案放在桌面上,然后打開cmd命令列解釋器,cd到.proto檔案的目錄下,然后運行protoc 這個腳本去編譯.proto檔案,編譯完成后即可生成兩個檔案,一個.c,一個.h,這里有一點,就是最好把這個腳本的可執行檔案路徑放到系統環境變數下,這樣才可以在任何路徑下編譯.proto檔案,具體的命令如下圖所示:
編譯完成后,在該路徑下會生成一個.c一個.h檔案,其內容如下:
/* Automatically generated nanopb constant definitions */
/* Generated by nanopb-0.3.8 at Fri Sep 11 16:29:22 2020. */
//.c
#include "Bmi160ToData.pb.h"
/* @@protoc_insertion_point(includes) */
#if PB_PROTO_HEADER_VERSION != 30
#error Regenerate this file with the current version of nanopb generator.
#endif
const pb_field_t STM32_GyroOffset_fields[4] = {
PB_FIELD( 1, FLOAT , SINGULAR, STATIC , FIRST, STM32_GyroOffset, gyrooffsetX, gyrooffsetX, 0),
PB_FIELD( 2, FLOAT , SINGULAR, STATIC , OTHER, STM32_GyroOffset, gyrooffsetY, gyrooffsetX, 0),
PB_FIELD( 3, FLOAT , SINGULAR, STATIC , OTHER, STM32_GyroOffset, gyrooffsetZ, gyrooffsetY, 0),
PB_LAST_FIELD
};
const pb_field_t STM32_GyroAccData_fields[7] = {
PB_FIELD( 1, UINT32 , SINGULAR, STATIC , FIRST, STM32_GyroAccData, accX, accX, 0),
PB_FIELD( 2, UINT32 , SINGULAR, STATIC , OTHER, STM32_GyroAccData, accY, accX, 0),
PB_FIELD( 3, UINT32 , SINGULAR, STATIC , OTHER, STM32_GyroAccData, accZ, accY, 0),
PB_FIELD( 4, UINT32 , SINGULAR, STATIC , OTHER, STM32_GyroAccData, gryoX, accZ, 0),
PB_FIELD( 5, UINT32 , SINGULAR, STATIC , OTHER, STM32_GyroAccData, gryoY, gryoX, 0),
PB_FIELD( 6, UINT32 , SINGULAR, STATIC , OTHER, STM32_GyroAccData, gryoZ, gryoY, 0),
PB_LAST_FIELD
};
const pb_field_t STM32_IsGetGyroOffset_fields[2] = {
PB_FIELD( 1, BOOL , SINGULAR, STATIC , FIRST, STM32_IsGetGyroOffset, IsGetStatus, IsGetStatus, 0),
PB_LAST_FIELD
};
const pb_field_t STM32_Bmi160ToData_fields[4] = {
PB_FIELD( 1, MESSAGE , SINGULAR, STATIC , FIRST, STM32_Bmi160ToData, gyroOffset, gyroOffset, &STM32_GyroOffset_fields),
PB_FIELD( 2, MESSAGE , SINGULAR, STATIC , OTHER, STM32_Bmi160ToData, gyroAccData, gyroOffset, &STM32_GyroAccData_fields),
PB_FIELD( 3, MESSAGE , SINGULAR, STATIC , OTHER, STM32_Bmi160ToData, isGetGyroOffset, gyroAccData, &STM32_IsGetGyroOffset_fields),
PB_LAST_FIELD
};
/* Check that field information fits in pb_field_t */
#if !defined(PB_FIELD_32BIT)
/* If you get an error here, it means that you need to define PB_FIELD_32BIT
* compile-time option. You can do that in pb.h or on compiler command line.
*
* The reason you need to do this is that some of your messages contain tag
* numbers or field sizes that are larger than what can fit in 8 or 16 bit
* field descriptors.
*/
PB_STATIC_ASSERT((pb_membersize(STM32_Bmi160ToData, gyroOffset) < 65536 && pb_membersize(STM32_Bmi160ToData, gyroAccData) < 65536 && pb_membersize(STM32_Bmi160ToData, isGetGyroOffset) < 65536), YOU_MUST_DEFINE_PB_FIELD_32BIT_FOR_MESSAGES_STM32_GyroOffset_STM32_GyroAccData_STM32_IsGetGyroOffset_STM32_Bmi160ToData)
#endif
#if !defined(PB_FIELD_16BIT) && !defined(PB_FIELD_32BIT)
/* If you get an error here, it means that you need to define PB_FIELD_16BIT
* compile-time option. You can do that in pb.h or on compiler command line.
*
* The reason you need to do this is that some of your messages contain tag
* numbers or field sizes that are larger than what can fit in the default
* 8 bit descriptors.
*/
PB_STATIC_ASSERT((pb_membersize(STM32_Bmi160ToData, gyroOffset) < 256 && pb_membersize(STM32_Bmi160ToData, gyroAccData) < 256 && pb_membersize(STM32_Bmi160ToData, isGetGyroOffset) < 256), YOU_MUST_DEFINE_PB_FIELD_16BIT_FOR_MESSAGES_STM32_GyroOffset_STM32_GyroAccData_STM32_IsGetGyroOffset_STM32_Bmi160ToData)
#endif
/* @@protoc_insertion_point(eof) */
/* Automatically generated nanopb header */
/* Generated by nanopb-0.3.8 at Fri Sep 11 16:29:22 2020. */
//.h
#ifndef PB_STM32_BMI160TODATA_PB_H_INCLUDED
#define PB_STM32_BMI160TODATA_PB_H_INCLUDED
#include <pb.h>
/* @@protoc_insertion_point(includes) */
#if PB_PROTO_HEADER_VERSION != 30
#error Regenerate this file with the current version of nanopb generator.
#endif
#ifdef __cplusplus
extern "C" {
#endif
/* Struct definitions */
typedef struct _STM32_GyroAccData {
uint32_t accX;
uint32_t accY;
uint32_t accZ;
uint32_t gryoX;
uint32_t gryoY;
uint32_t gryoZ;
/* @@protoc_insertion_point(struct:STM32_GyroAccData) */
} STM32_GyroAccData;
typedef struct _STM32_GyroOffset {
float gyrooffsetX;
float gyrooffsetY;
float gyrooffsetZ;
/* @@protoc_insertion_point(struct:STM32_GyroOffset) */
} STM32_GyroOffset;
typedef struct _STM32_IsGetGyroOffset {
bool IsGetStatus;
/* @@protoc_insertion_point(struct:STM32_IsGetGyroOffset) */
} STM32_IsGetGyroOffset;
typedef struct _STM32_Bmi160ToData {
STM32_GyroOffset gyroOffset;
STM32_GyroAccData gyroAccData;
STM32_IsGetGyroOffset isGetGyroOffset;
/* @@protoc_insertion_point(struct:STM32_Bmi160ToData) */
} STM32_Bmi160ToData;
/* Default values for struct fields */
/* Initializer values for message structs */
#define STM32_GyroOffset_init_default {0, 0, 0}
#define STM32_GyroAccData_init_default {0, 0, 0, 0, 0, 0}
#define STM32_IsGetGyroOffset_init_default {0}
#define STM32_Bmi160ToData_init_default {STM32_GyroOffset_init_default, STM32_GyroAccData_init_default, STM32_IsGetGyroOffset_init_default}
#define STM32_GyroOffset_init_zero {0, 0, 0}
#define STM32_GyroAccData_init_zero {0, 0, 0, 0, 0, 0}
#define STM32_IsGetGyroOffset_init_zero {0}
#define STM32_Bmi160ToData_init_zero {STM32_GyroOffset_init_zero, STM32_GyroAccData_init_zero, STM32_IsGetGyroOffset_init_zero}
/* Field tags (for use in manual encoding/decoding) */
#define STM32_GyroAccData_accX_tag 1
#define STM32_GyroAccData_accY_tag 2
#define STM32_GyroAccData_accZ_tag 3
#define STM32_GyroAccData_gryoX_tag 4
#define STM32_GyroAccData_gryoY_tag 5
#define STM32_GyroAccData_gryoZ_tag 6
#define STM32_GyroOffset_gyrooffsetX_tag 1
#define STM32_GyroOffset_gyrooffsetY_tag 2
#define STM32_GyroOffset_gyrooffsetZ_tag 3
#define STM32_IsGetGyroOffset_IsGetStatus_tag 1
#define STM32_Bmi160ToData_gyroOffset_tag 1
#define STM32_Bmi160ToData_gyroAccData_tag 2
#define STM32_Bmi160ToData_isGetGyroOffset_tag 3
/* Struct field encoding specification for nanopb */
extern const pb_field_t STM32_GyroOffset_fields[4];
extern const pb_field_t STM32_GyroAccData_fields[7];
extern const pb_field_t STM32_IsGetGyroOffset_fields[2];
extern const pb_field_t STM32_Bmi160ToData_fields[4];
/* Maximum encoded size of messages (where known) */
#define STM32_GyroOffset_size 15
#define STM32_GyroAccData_size 36
#define STM32_IsGetGyroOffset_size 2
#define STM32_Bmi160ToData_size 59
/* Message IDs (where set with "msgid" option) */
#ifdef PB_MSGID
#define BMI160TODATA_MESSAGES \
#endif
#ifdef __cplusplus
} /* extern "C" */
#endif
/* @@protoc_insertion_point(eof) */
#endif
f
至此,protobuf的C檔案格式的代碼已經生成,
四、開始通信!!!
把剛才生成的兩個檔案拉到專案里面,同時把官方的protoc所用到的三個檔案和其對應的.h檔案也拉到專案中來,檔案格式如下圖:
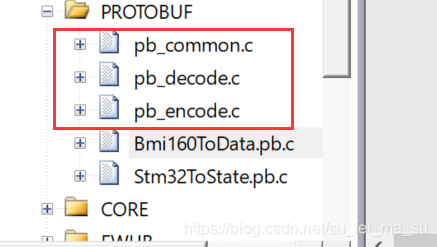
這三個檔案回合protoc腳本一起放在文末,
我們先來看打包并發送一幀protobuf資料的代碼:
/*******************************************************************************
* Function Name : vProto_Encode_Send_FastPack()
* Description : 編碼protobuf資料,并將編碼過后的陣列通過串口1發送給上層
* Input : STM32_Stm32ToState 型別的結構體指標
* Output : None
* Return : true:編碼成功 false:編碼失敗
*******************************************************************************/
bool vProto_Encode_Send_FastPack(void)
{
STM32_Stm32ToState STM32_Stm32ToState_Fast = STM32_Stm32ToState_init_default;//快包
int message_length;
bool status;
pb_ostream_t op_stream;//創建一個編碼物件,保存發送buf的資料長度,資料首地址,最大位元組等資訊
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.accX = bmi160_protobuf.accx;
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.accY = bmi160_protobuf.accy;
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.accZ = bmi160_protobuf.accz;
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.gryoX = bmi160_protobuf.gryx;
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.gryoY = bmi160_protobuf.gryy;
STM32_Stm32ToState_Fast.bmi160ToData.gyroAccData.gryoZ = bmi160_protobuf.gryz;
//清空發送緩沖陣列
memset(ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex] , 0 , sizeof(ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex]));
//初始化這個編碼物件,并填充發送陣列首地址,發送資料長度
op_stream = pb_ostream_from_buffer(ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex] , sizeof(ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex]));
//呼叫編碼API,將形參結構體的值賦給編碼物件(陣列首地址和長度)
status = pb_encode(&op_stream,STM32_Stm32ToState_fields, &STM32_Stm32ToState_Fast);
if(!status) return status;
//打包以后資料的長度
message_length = op_stream.bytes_written;
DEBUG("零飄結構體編碼后的大小為:%d" , message_length);
ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex][0] = ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex][0];
//發送該幀資料
memcpy(ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex],(uint8_t *)&ucUSART1TrainsmitBuffer[ucWtiteDataToUSART1TransmitGrooveIndex],message_length);
ucUSART1TrainsmitLength[ucWtiteDataToUSART1TransmitGrooveIndex] = message_length;
WriteDataToUSART1TraismitBufferDone( );//發送下標移位
return status;
}
其實就是先把我們需要發送的結構體填充對應的值,然后通過protoc的API將這個結構體序列化以后的值放在一個buf陣列里面,最后把這個陣列通過串口DMA發送出去,這時linux端會從串口接收到該幀資料并存放在一個陣列里面,然后通過API去將這個陣列反序列化成.proto生成的類,這時類里的值,就是stm32發送上去的值,
同理可得,stm32接收到linux端發送的一幀資料,可以通過串口IDLE+DMA接收到一個陣列里面,然后呼叫API去反序列化這個陣列,并將結果填充到接收結構體里面,即可完成一次資料的收發,接收代碼如下:
/*******************************************************************************
* Function Name : vProto_Decode_Receive_Lslam()
* Description : 解碼protobuf資料,并分析資料和改變坐標全域變數
* Input : buf:接收一幀陣列,buf_length:接收一幀陣列的陣列長度,
STM32_Stm32ToStete 型別的結構體指標
* Output : None
* Return : true:解碼成功 false:解碼失敗
*******************************************************************************/
bool vProto_Decode_Receive(u8* buf , u16 buf_length)
{
bool status;
STM32_Stm32ToState STM32_Stm32ToState_t = STM32_Stm32ToState_init_default;
pb_istream_t ip_stream;//創建一個解碼物件,用于保存接收到的陣列地址和陣列長度
ip_stream = pb_istream_from_buffer(buf,buf_length);//把接收到的一幀資料和幀長度給到解碼物件
if(pb_decode(&ip_stream , STM32_Stm32ToState_fields ,&STM32_Stm32ToState_t))
{
g_tRouteCoord.Self_Coox = LSLAM_PlanMsgToState_t.curpos.x;
g_tRouteCoord.Self_Cooy = LSLAM_PlanMsgToState_t.curpos.y;
g_tRouteCoord.Self_Angle = LSLAM_PlanMsgToState_t.curpos.theta;
g_tRouteCoord.CurrentCoo.cooY = LSLAM_PlanMsgToState_t.point1.y;
g_tRouteCoord.Coo1.cooX = LSLAM_PlanMsgToState_t.point2.x;
g_tRouteCoord.Coo1.cooY = LSLAM_PlanMsgToState_t.point2.y;
g_tRouteCoord.Coo2.cooX = LSLAM_PlanMsgToState_t.point3.x;
g_tRouteCoord.Coo2.cooY = LSLAM_PlanMsgToState_t.point3.y;
g_tRouteCoord.Coo3.cooX = LSLAM_PlanMsgToState_t.point4.x;
g_tRouteCoord.Coo3.cooY = LSLAM_PlanMsgToState_t.point4.y;
g_tRouteCoord.Coo4.cooX = LSLAM_PlanMsgToState_t.point5.x;
g_tRouteCoord.Coo4.cooY = LSLAM_PlanMsgToState_t.point5.y;
IsGetRoute = true;
}
g_tRouteCoord.CurrentCoo.cooX = LSLAM_PlanMsgToState_t.point1.x;
if(pb_decode(&ip_stream , IsGetGyroOffset_fields ,&IsGetGyroOffset_t))
{
H6IsGetGyroOffset = IsGetGyroOffset_t.IsGetStatus;
}
return status;
}
通過這個解碼物件生成的值,可以判斷資料對應的哪個結構體,從而填充不同的結構體出來,
五、protobuf的缺點和不足
protobuf終究是面向上層開發出來的資料打包協議,但是正如.proto檔案限制的那樣,它打包資料的最小單位是32位,也就是說我們想通過protobuf傳輸一個bool量的資料也要用一個32位的結構體成員去承載它,
盡管protobuf擁有優化打包資料記憶體的功能,也就是說當一個資料很小的時候(小于255),protobuf會將其打包成uint8_t型別的資料序列化到陣列里,但是這樣的特性也意味著資料打包長短的不確定性,這在一個穩定的通信系統里面是很致命的一點,我們需要定義一個最大長度的陣列去承載protobuf序列化前后的資料,
protobuf打包資料其實和我們自己定義協議一樣,我們可以把序列化以后的資料通過串口列印出來,就可以發現所謂的序列化也只不過是對一幀資料加上幀頭幀尾幀校驗然后發送出去,利用protobuf協議只是方便和linux端的通信,這樣專案里的每個程式塊都可以用同一個.proto檔案進行資料的通信,這在一個大型專案里是很有好處的,
至此,基于protobuf完成stm32和Linux的資料通信為大家介紹完畢,腳本和protoc公共檔案見鏈接
protobuf
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/32750.html
標籤:其他
上一篇:MFC開發程序中,自定義的類中做分割視窗的影像顯示,GetDC出現問題:function does not take 0 parameters?