x = tf.compat.v1.placeholder(tf.float32, shape=[None, w, h, c], name='x')
y_ = tf.compat.v1.placeholder(tf.int32, shape=[None, ], name='y_')placeholder函式定義如下:
tf.placeholder(dtype, shape=None, name=None),placeholder是占位符,在tensorflow中類似于函式引數,運行時必須傳入值,
-
dtype:資料型別,常用的是tf.float32,tf.float64等數值型別,
-
shape:資料形狀,默認是None,就是一維值,也可以是多維,比如[2,3], [None, 3]表示列是3,行不定, 此引數可以根據提供的資料推導得到,不一定要給出,,
-
name:名稱, 比如常在上邊的x, y_,
-
比如計算3*4=12 import tensorflow as tf import numpy as np input1 = tf.placeholder(tf.float32) input2 = tf.placeholder(tf.float32) output = tf.multiply(input1, input2) with tf.Session() as sess: print sess.run(output, feed_dict = {input1:[3.], input2: [4.]})計算矩陣相乘x*y import tensorflow as tf import numpy as np x = tf.placeholder(tf.float32, shape=(1024, 1024)) y = tf.matmul(x, x) with tf.Session() as sess: # print(sess.run(y)) # ERROR: x is none now rand_array = np.random.rand(1024, 1024) print(sess.run(y, feed_dict={x: rand_array})) # Will succeed.使用庫函式進行矩陣運算 import tensorflow as tf # 定義placeholder input1 = tf.placeholder(tf.float32,shape=(1, 2),name="input-1") input2 = tf.placeholder(tf.float32,shape=(2, 1),name="input-2") # 定義矩陣乘法運算(注意區分matmul和multiply的區別:matmul是矩陣乘法,multiply是點乘) output = tf.matmul(input1, input2) # 通過session執行乘法運行 with tf.Session() as sess: # 執行時要傳入placeholder的值 print sess.run(output, feed_dict = {input1:[1,2], input2:[3,4]}) # 最終執行結果 [11]2#:卷積和池化
-
卷積層 tf.nn.conv2d(input, filter, strides=, padding=, name=None) 計算給定4-D input和filter張量的2維卷積 * input:給定的輸入張量,具有[batch, heigth, width, channel],型別為float32, 64 * filter:指定過濾器的大小,[filter_height, filter_width, in_channels, out_channels]. out_channels:視窗數量 * strides:strides = [1, stride, stride, 1],步長 * padding:“SAME”, “VALID”,使用的填充演算法的型別,使用“SAME”,其中”VALID”表示滑動超出部分舍棄,“SAME”表示填充,使得變化后height, width一樣大新的激活函式-Reluf(x) = max(0, x) tf.nn.relu(features, name=None) features: 卷積后加上偏置的結果 return: 結果 1. 采用sigmoid等函式,反向傳播求誤差梯度時,計算量相對大,而采用Relu激活函式,整個程序的計算量節省很多 1. 對于深層網路,sigmoid函式反向傳播時,很容易就會出現梯度消失的情況(求不出權重和偏置)池化層(Pooling)計算
-
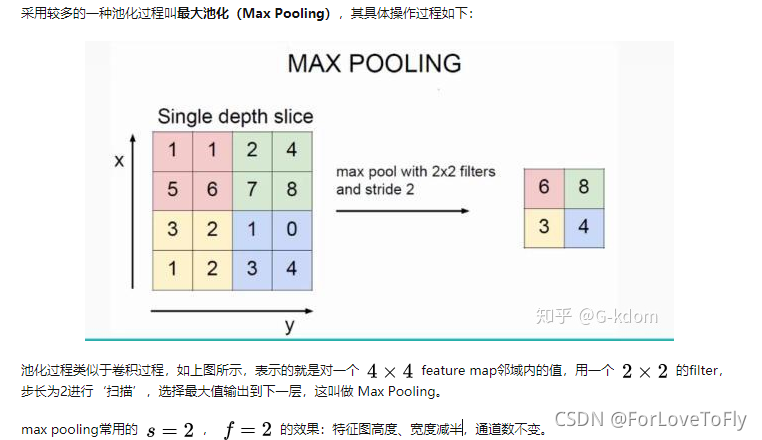
Pooling層主要的作用是特征提取,通過去掉Feature Map中不重要的樣本,(這里如何確定什么引數不重要是個很難的問題,哪些樣本不重要,這個是很不好判斷的,)進一步減少引數數量,Pooling的方法很多,最常用的是Max Pooling, tf.nn.max_pool(value, ksize=, strides=, padding=,name=None) 輸入上執行最大池數 * value: 4-D Tensor形狀[batch, height, width, channels] * ksize: 池化視窗大小,[1, ksize, ksize, 1] * strides:步長大小,[1, strides, strides, 1] * padding: “SAME”, “VALID”,使用的填充演算法的型別,使用“SAME”Full Connected層(全連接層)
-
前面的卷積和池化相當于做特征工程,后面的全連接相當于做特征加權,最后的全連接層在整個卷積神經網路中起到“分類器”的作用,
函式的作用是將tensor變換為引數shape的形式,
其中shape為一個串列形式,特殊的一點是串列中可以存在-1,-1代表的含義是不用我們自己指定這一維的大小,函式會自動計算,但串列中只能存在一個-1,(當然如果存在多個-1,就是一個存在多解的方程了)
-
import tensorflow as tf from tensorflow.examples.tutorials.mnist import input_data # 輸入層# 準備占位符with tf.variable_scope('data'): x = tf.placeholder(tf.float32, [None, 784]) y_true = tf.placeholder(tf.float32, [None, 10]) # 卷積層# 卷積1with tf.variable_scope('conv1'): # 初始化權重 視窗3*3 步長1 32個視窗 weight1 = tf.Variable(tf.random_normal(shape=[3, 3, 1, 32])) bias1 = tf.Variable(tf.constant(1.0, shape=[32])) x_reshaped = tf.reshape(x, [-1, 28, 28, 1]) # x [None, 28, 28, 1] ----> [None, 28, 28, 32] conved1 = tf.nn.conv2d(input=x_reshaped, filter=weight1, strides=[1, 1, 1, 1], padding='SAME') print(conved1) relu1 = tf.nn.relu(conved1) + bias1 print(relu1)# 池化1with tf.variable_scope('pool'): # 視窗2*2 步長2 x [None, 28, 28, 32] ----> [None, 14, 14, 32] pool1 = tf.nn.max_pool(value=relu1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME') print(pool1) # 卷積2with tf.variable_scope('conv2'): # 視窗3*3 步長1 64個視窗 weight2 = tf.Variable(tf.random_normal([3, 3, 32, 64])) bias2 = tf.Variable(tf.constant(1.0, shape=[64])) # x [None, 14, 14, 32] ----> [None, 14, 14, 64] conved2 = tf.nn.conv2d(input=pool1, filter=weight2, strides=[1, 1, 1, 1], padding='SAME') print(conved2) relu2 = tf.nn.relu(conved2) + bias2 # 池化2with tf.variable_scope('pool2'): # 視窗2*2 步長2 x [None, 14, 14, 64] ----> [None, 7, 7, 64] pool2 = tf.nn.max_pool(value=relu2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME') # 全連接層 x[None, 7, 7, 64] -> x[None, 7*7*64] * ([7*7*64, 10]) ----> y[None, 10]with tf.variable_scope('full_coon'): x_fc = tf.reshape(pool2, [-1, 7*7*64]) weight_fc = tf.Variable(tf.random_normal([7*7*64, 10])) bias_fc = tf.Variable(tf.constant(1.0, shape=[10])) y_predict = tf.matmul(x_fc, weight_fc) + bias_fc # 交叉熵損失函式with tf.variable_scope('loss'): loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(labels=y_true, logits=y_predict)) train_op = tf.train.GradientDescentOptimizer(0.001).minimize(loss) # 計算準確度with tf.variable_scope('acc'): equal_list = tf.equal(tf.argmax(y_true, 1), tf.argmax(y_predict, 1)) accuracy = tf.reduce_mean(tf.cast(equal_list, tf.float32)) init_var = tf.global_variables_initializer() with tf.Session() as sess: sess.run(init_var) mnist = input_data.read_data_sets('./input_data', one_hot=True) for i in range(1000): image, label = mnist.train.next_batch(100) sess.run(train_op, feed_dict={x: image, y_true: label}) print('第%s步,準確率為: %s' % (i, sess.run(accuracy, feed_dict={x: image, y_true: label})))一個模型例子::: def model(input_tensor, train, regularizer): with tf.variable_scope('layer1-conv1'): # 定義一個作用域:layer1-conv1,在該作用域下面可以定義相同名稱的變數(用于變數) conv1_weights = tf.get_variable("weight", [5, 5, 3, 32], initializer=tf.truncated_normal_initializer(stddev=0.1)) # 定義變數權重:weight,名稱是weight;5,5代表卷積核的大小,3代表輸入的信道數目,32代表輸出的信道數目;initializer代表神經網路權重和卷積核的推薦初始值,生成截斷正態分布亂數,服從標準差為0.1 conv1_biases = tf.get_variable("bias", [32], initializer=tf.constant_initializer(0.0)) # 定義變數偏置:bias,名稱bias,[32]代表當前層的深度;initializer代表偏置的初始化,用函式tf.constant_initializer將其初始化為0,也可以初始化為tf.zeros_initializer或者tf.ones_initializer conv1 = tf.nn.conv2d(input_tensor, conv1_weights, strides=[1, 1, 1, 1], padding='SAME') # 上面為定義卷積層:input_tensor為當前層的節點矩陣;conv1_weights代表卷積層的權重;strides為不同方向上面的步長;padding標識填充,有兩種方式,SAME表示用0填充,“VALID”表示不填充, relu1 = tf.nn.relu(tf.nn.bias_add(conv1, conv1_biases)) # 定義激活函式:利用bias_add給每個節點都加上偏置項,然后利用relu函式去線性化 with tf.name_scope("layer2-pool1"): # 定義一個:layer2-pool1(用于op) # 池化層可以優先縮小矩陣的尺寸,從而減小最后全連接層當中的引數;池化層既可以加快計算速度,也可以防止過擬合, pool1 = tf.nn.max_pool(relu1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="VALID") # ksize代表pool視窗的尺寸,首尾兩個數必須是1,ksize最常用[1,2,2,1]和[1,3,3,1];strides代表filter的步長,首尾兩個數必須為1;padding代表填充方式; with tf.variable_scope("layer3-conv2"): # 定義作用域(用于變數) # 定義權重 conv2_weights = tf.get_variable("weight", [5, 5, 32, 64], initializer=tf.truncated_normal_initializer(stddev=0.1)) conv2_biases = tf.get_variable("bias", [64], initializer=tf.constant_initializer(0.0)) # 定義偏置 conv2 = tf.nn.conv2d(pool1, conv2_weights, strides=[1, 1, 1, 1], padding='SAME') # 定義卷積層 relu2 = tf.nn.relu(tf.nn.bias_add(conv2, conv2_biases)) # 定義激活函式 with tf.name_scope("layer4-pool2"): # 定義命名空間(用于op) pool2 = tf.nn.max_pool(relu2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') # 定義池化層 with tf.variable_scope("layer5-conv3"): # 定義作用域 (用于變數) # 定義權重 conv3_weights = tf.get_variable("weight", [3, 3, 64, 128], initializer=tf.truncated_normal_initializer(stddev=0.1)) conv3_biases = tf.get_variable("bias", [128], initializer=tf.constant_initializer(0.0)) # 定義偏置 conv3 = tf.nn.conv2d(pool2, conv3_weights, strides=[1, 1, 1, 1], padding='SAME') # 定義卷積層 relu3 = tf.nn.relu(tf.nn.bias_add(conv3, conv3_biases)) # 定義激活函式 with tf.name_scope("layer6-pool3"): # 定義命名空間(用于op) pool3 = tf.nn.max_pool(relu3, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') # 定義池化層 with tf.variable_scope("layer7-conv4"): # 定義作用域(用于變數) # 定義權重 conv4_weights = tf.get_variable("weight", [3, 3, 128, 128], initializer=tf.truncated_normal_initializer(stddev=0.1)) conv4_biases = tf.get_variable("bias", [128], initializer=tf.constant_initializer(0.0)) # 定義偏置 conv4 = tf.nn.conv2d(pool3, conv4_weights, strides=[1, 1, 1, 1], padding='SAME') # 定義卷積層 relu4 = tf.nn.relu(tf.nn.bias_add(conv4, conv4_biases)) # 定義激活函式 with tf.name_scope("layer8-pool4"): # 定義命名空間(用于op) pool4 = tf.nn.max_pool(relu4, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') # 定義池化層 nodes = 6 * 6 * 128 reshaped = tf.reshape(pool4, [-1, nodes]) print("shape of reshaped:", reshaped.shape) # reshape函式將pool4的輸出轉化成向量 # 定義作用域: with tf.variable_scope('layer9-fc1'): # 定義全連接層的權重: fc1_weights = tf.get_variable("weight", [nodes, 1024], initializer=tf.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.add_to_collection('losses', regularizer(fc1_weights)) # 給全連接層的權重添加正則項,tf.add_to_collection函式可以把變數放入一個集合,把很多變數變成一個串列 fc1_biases = tf.get_variable("bias", [1024], initializer=tf.constant_initializer(0.1)) # 定義全連接層的偏置: fc1 = tf.nn.relu(tf.matmul(reshaped, fc1_weights) + fc1_biases) # 定義激活函式: if train: fc1 = tf.nn.dropout(fc1, 0.5) # 針對訓練資料,在全連接層添加dropout層,防止過擬合 with tf.variable_scope('layer10-fc2'): fc2_weights = tf.get_variable("weight", [1024, 512], initializer=tf.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.add_to_collection('losses', regularizer(fc2_weights)) fc2_biases = tf.get_variable("bias", [512], initializer=tf.constant_initializer(0.1)) fc2 = tf.nn.relu(tf.matmul(fc1, fc2_weights) + fc2_biases) if train: fc2 = tf.nn.dropout(fc2, 0.5) with tf.variable_scope('layer11-fc3'): fc3_weights = tf.get_variable("weight", [512, 5], initializer=tf.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.add_to_collection('losses', regularizer(fc3_weights)) fc3_biases = tf.get_variable("bias", [5], initializer=tf.constant_initializer(0.1)) logit = tf.matmul(fc2, fc3_weights) + fc3_biases return logitdef inference(input_tensor, train, regularizer): with tf.compat.v1.variable_scope('layer1-conv1'): # 定義變數權重:weight,名稱是weight;5,5代表卷積核的大小,3代表輸入的信道數目,32代表輸出的信道數目; # initializer代表神經網路權重和卷積核的推薦初始值,生成截斷正態分布亂數,服從標準差為0.1 conv1_weights = tf.compat.v1.get_variable("weight", [5, 5, 3, 32], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) # 初始化偏置值為0 conv1_biases = tf.compat.v1.get_variable("bias", [32], initializer=tf.constant_initializer(0.0)) conv1 = tf.nn.conv2d(input_tensor, conv1_weights, strides=[1, 1, 1, 1], padding='SAME') relu1 = tf.nn.relu(tf.nn.bias_add(conv1, conv1_biases)) with tf.name_scope("layer2-pool1"): pool1 = tf.compat.v1.nn.max_pool(relu1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="VALID") logging.info(f"First convolutional layer:{pool1}") with tf.compat.v1.variable_scope("layer3-conv2"): conv2_weights = tf.compat.v1.get_variable("weight", [5, 5, 32, 64], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) conv2_biases = tf.compat.v1.get_variable("bias", [64], initializer=tf.compat.v1.constant_initializer(0.0)) conv2 = tf.compat.v1.nn.conv2d(pool1, conv2_weights, strides=[1, 1, 1, 1], padding='SAME') relu2 = tf.compat.v1.nn.relu(tf.nn.bias_add(conv2, conv2_biases)) with tf.name_scope("layer4-pool2"): pool2 = tf.compat.v1.nn.max_pool(relu2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') logging.info(f"Second convolutional layer:{pool2}") with tf.compat.v1.variable_scope("layer5-conv3"): conv3_weights = tf.compat.v1.get_variable("weight", [3, 3, 64, 128], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) conv3_biases = tf.compat.v1.get_variable("bias", [128], initializer=tf.compat.v1.constant_initializer(0.0)) conv3 = tf.compat.v1.nn.conv2d(pool2, conv3_weights, strides=[1, 1, 1, 1], padding='SAME') relu3 = tf.compat.v1.nn.relu(tf.nn.bias_add(conv3, conv3_biases)) with tf.compat.v1.name_scope("layer6-pool3"): pool3 = tf.compat.v1.nn.max_pool(relu3, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') logging.info(f"Third convolutional layer:{pool3}") with tf.compat.v1.variable_scope("layer7-conv4"): conv4_weights = tf.compat.v1.get_variable("weight", [3, 3, 128, 128], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) conv4_biases = tf.compat.v1.get_variable("bias", [128], initializer=tf.compat.v1.constant_initializer(0.0)) conv4 = tf.compat.v1.nn.conv2d(pool3, conv4_weights, strides=[1, 1, 1, 1], padding='SAME') relu4 = tf.compat.v1.nn.relu(tf.nn.bias_add(conv4, conv4_biases)) with tf.compat.v1.name_scope("layer8-pool4"): pool4 = tf.compat.v1.nn.max_pool(relu4, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='VALID') logging.info(f"The fourth convolutional layer:{pool4}") nodes = 6 * 6 * 128 # 展開 reshaped = tf.compat.v1.reshape(pool4, [-1, nodes]) with tf.compat.v1.variable_scope('layer9-fc1'): fc1_weights = tf.compat.v1.get_variable("weight", [nodes, 1024], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.compat.v1.add_to_collection('losses', regularizer * tf.nn.l2_loss(fc1_weights)) fc1_biases = tf.compat.v1.get_variable("bias", [1024], initializer=tf.compat.v1.constant_initializer(0.1)) fc1 = tf.compat.v1.nn.relu(tf.compat.v1.matmul(reshaped, fc1_weights) + fc1_biases) logging.info(f"The first fully connected layer:{fc1}") if train: fc1 = tf.compat.v1.nn.dropout(fc1, 0.5) with tf.compat.v1.variable_scope('layer10-fc2'): fc2_weights = tf.compat.v1.get_variable("weight", [1024, 512], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.compat.v1.add_to_collection('losses', regularizer * tf.nn.l2_loss(fc2_weights)) fc2_biases = tf.compat.v1.get_variable("bias", [512], initializer=tf.compat.v1.constant_initializer(0.1)) fc2 = tf.compat.v1.nn.relu(tf.matmul(fc1, fc2_weights) + fc2_biases) if train: fc2 = tf.compat.v1.nn.dropout(fc2, 0.5) logging.info(f"The second fully connected layer:{fc2}") with tf.compat.v1.variable_scope('layer11-fc3'): fc3_weights = tf.compat.v1.get_variable("weight", [512, 5], initializer=tf.compat.v1.truncated_normal_initializer(stddev=0.1)) if regularizer != None: tf.compat.v1.add_to_collection('losses', regularizer * tf.nn.l2_loss(fc3_weights)) fc3_biases = tf.compat.v1.get_variable("bias", [5], initializer=tf.compat.v1.constant_initializer(0.1)) logit = tf.compat.v1.matmul(fc2, fc3_weights) + fc3_biases return logitconv1 = tf.nn.conv2d(input_tensor,conv1_weights,strides=[1,1,1,1],padding='SAME')
這是一個常見的卷積操作,其中strides=【1,1,1,1】表示滑動步長為1,padding=‘SAME’表示填0操作
當我們要設定步長為2時,strides=【1,2,2,1】,很多同學可能不理解了,這四個引數分別代表了什么,
strides在官方定義中是一個一維具有四個元素的張量,其規定前后必須為1,所以我們可以改的是中間兩個數,中間兩個數分別代表了水平滑動和垂直滑動步長值,于是就很好理解了,在卷積核移動逐漸掃描整體圖時候,因為步長的設定問題,可能導致剩下未掃描的空間不足以提供給卷積核的,大小掃描 比如有圖大小為5*5,卷積核為2*2,步長為2,卷積核掃描了兩次后,剩下一個元素,不夠卷積核掃描了,這個時候就在后面補零,補完后滿足卷積核的掃描,這種方式就是same,如果說把剛才不足以掃描的元素位置拋棄掉,就是valid方式,
-
函式引數的解釋:
tf.nn.conv2d(input, filter, strides, padding, use_cudnn_on_gpu=None, name=None)
除去name引數用以指定該操作的name,與方法有關的一共五個引數:
input:
指需要做卷積的輸入影像,它要求是一個Tensor,具有[batch, in_height, in_width, in_channels]這樣的shape,具體含義是[訓練時一個batch的圖片數量, 圖片高度, 圖片寬度, 影像通道數],注意這是一個4維的Tensor,要求型別為float32和float64其中之一
filter:
相當于CNN中的卷積核,它要求是一個Tensor,具有[filter_height, filter_width, in_channels, out_channels]這樣的shape,具體含義是[卷積核的高度,卷積核的寬度,影像通道數,卷積核個數],要求型別與引數input相同,有一個地方需要注意,第三維in_channels,就是引數input的第四維,【有時候也叫ksize或卷積核】
* strides:卷積時在影像每一維的步長,這是一個一維的向量,長度4,【注意:一般兩邊為1.形如[1,height,weight,1]】,
padding:
string型別的量,只能是”SAME”,”VALID”其中之一,這個值決定了不同的卷積方式【same:不夠還加,valid:不夠舍棄,】
use_cudnn_on_gpu:
bool型別,是否使用cudnn加速,默認為true
batch和Eposh
神經網路中Batch和Epoch之間的區別是什么? 隨機梯度下降法是一種具有大量超引數的學習演算法,兩個超引數: Batch大小和Epoch數量,它們都是整數值,batch字面上是批量的意思,在深度學習中指的是計算一次cost需要的輸入資料個數, 這意味著資料集將分為40個Batch,每個Batch有5個樣本,每批五個樣品后,模型權重將更新, 這也意味著一個epoch將涉及40個Batch或40個模型更新, 有1000個Epoch,模型將暴露或傳遞整個資料集1,000次, 一個 batch 的樣本通常比單個輸入更接近于總體輸入資料的分布,batch 越大就越近似,然而,每個 batch 將花費更長的時間來處理,并且仍然只更新模型一次,
-
Sample: 樣本,資料集中的一個元素,一條資料,
例1: 在卷積神經網路中,一張影像是一個樣本,
例2: 在語音識別模型中,一段音頻是一個樣本,
-
Batch: 批,含有 N 個樣本的集合,每一個 batch 的樣本都是獨立并行處理的,在訓練時,一個 batch 的結果只會用來更新一次模型,
一個 batch 的樣本通常比單個輸入更接近于總體輸入資料的分布,batch 越大就越近似,然而,每個 batch 將花費更長的時間來處理,并且仍然只更新模型一次,在推理(評估/預測)時,建議條件允許的情況下選擇一個盡可能大的 batch,(因為較大的 batch 通常評估/預測的速度會更快),
-
Epoch: 輪次,通常被定義為 「在整個資料集上的一輪迭代」,用于訓練的不同的階段,這有利于記錄和定期評估,
當在 Keras 模型的 fit 方法中使用 validation_data 或 validation_split 時,評估將在每個 epoch 結束時運行,
在 Keras 中,可以添加專門的用于在 epoch 結束時運行的 callbacks 回呼,例如學習率變化和模型檢查點(保存),
-
這也意味著一個epoch將涉及40個Batch或40個模型更新,
有1000個Epoch,模型將暴露或傳遞整個資料集1,000次,在整個培訓程序中,總共有40,000Batch,
用一個小例子來說明這一點,
假設您有一個包含200個樣本(資料行)的資料集,并且您選擇的Batch大小為5和1,000個Epoch,
這意味著資料集將分為40個Batch,每個Batch有5個樣本,每批五個樣品后,模型權重將更新,
-
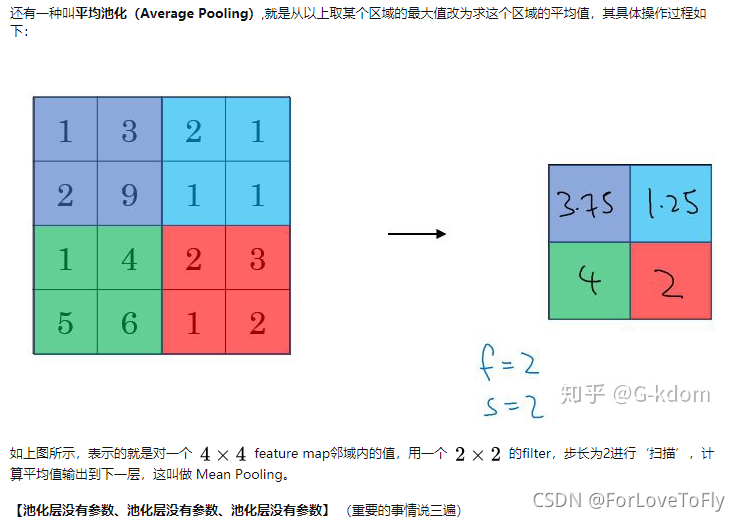
池化
池化程序在一般卷積程序后,池化(pooling) 的本質,其實就是采樣,Pooling 對于輸入的 Feature Map,選擇某種方式對其進行降維壓縮,以加快運算速度,
-
池化的作用:
(1)保留主要特征的同時減少引數和計算量,防止過擬合,
(2)invariance(不變性),這種不變性包括translation(平移),rotation(旋轉),scale(尺度),
Pooling 層說到底還是一個特征選擇,資訊過濾的程序,也就是說我們損失了一部分資訊,這是一個和計算性能的一個妥協,隨著運算速度的不斷提高,我認為這個妥協會越來越小,
現在有些網路都開始少用或者不用pooling層了,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/327858.html
標籤:AI