由于筆者在學習機械臂的程序中,原來的Ubuntu20.04出現了很多錯誤,在多日的嘗試之后,決定降低版本,重新安裝Ubuntu16.04,在安裝程序中由于sudo rosdep init 以及rosdep update的這兩步在嘗試過網上很多方法之后,始終得不到解決,
于是筆者在借鑒 趙虛左 rosdep的安裝方法之后,摸索解決了這個問題,故分享給現在還存在這樣困擾的人,
(如果在rosdep update之后 沒有一次成功 可以多試幾次 筆者裝了三臺電腦,都是在三次之內成功安裝)
到了執行sudo rosdep init 的時候,不用執行 sudo rosdep init
執行
sudo mkdir -p /etc/ros/rosdep/sources.list.d
cd /etc/ros/rosdep/sources.list.d
sudo touch 20-default.list這一步就是建好了rosdep init需要去下載鏈接的檔案,然后執行
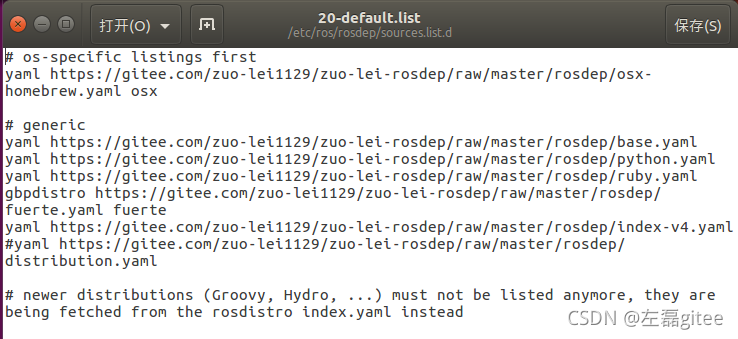
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list這里是進入這個檔案中,給這個檔案寫之后rosdep update需要鏈接到的檔案
這里搜索我的gitee的庫去粘貼這個檔案的內容
網址是:左磊/左磊rosdep (gitee.com)
進入rosdep/sources.list.d 之中,會看到20-default.list這個檔案

然后點擊這個檔案,一鍵復制里面的內容
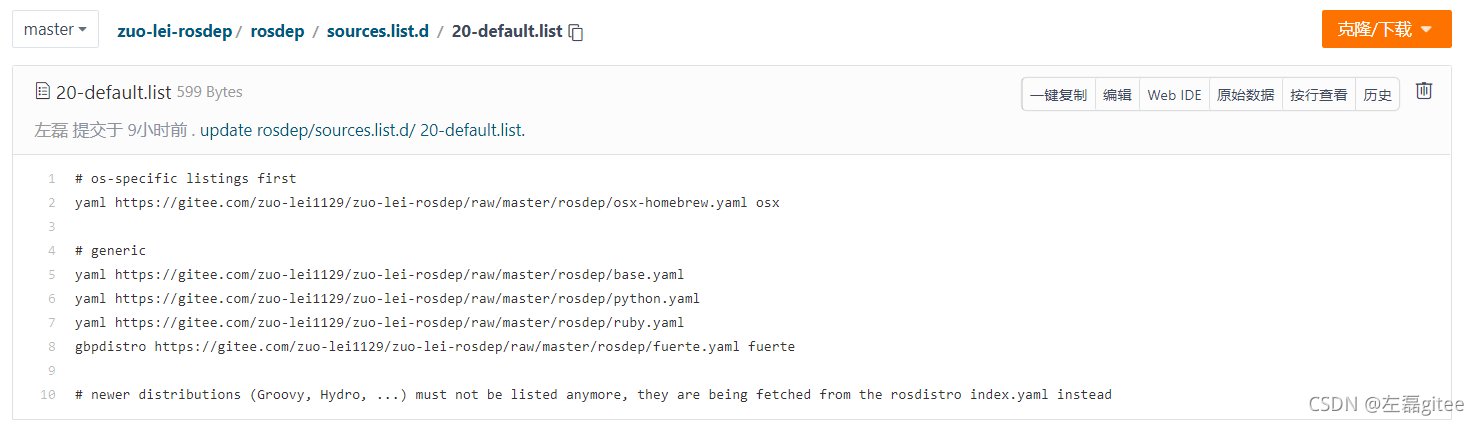
把這個內容放到你建好的 20-default.list 這個檔案里面去,然后保存檔案之后關閉,如圖
然后繼續執行
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py進入到這個檔案中,修改如下內容:
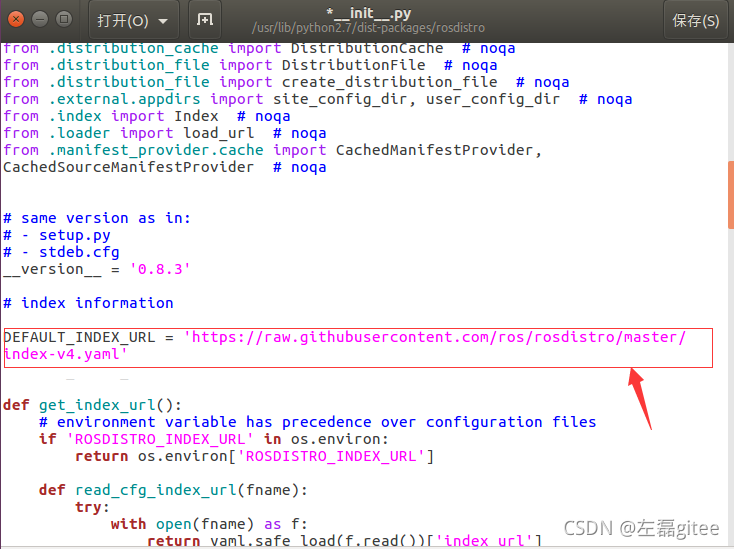
修改后的內容如下
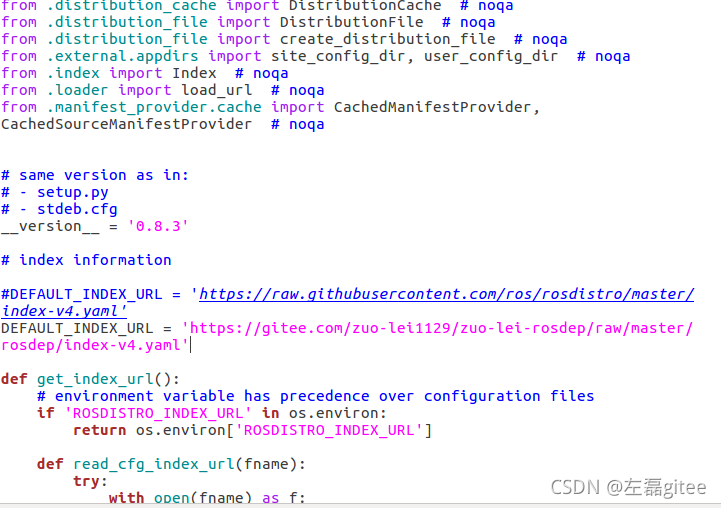
替換的地址為: https://gitee.com/zuo-lei1129/zuo-lei-rosdep/raw/master/rosdep
替換完成之后 保存后退出
跳過執行sudo rosdep init
直接去執行 rosdep update 這樣子就可以了
成功的截圖如下:
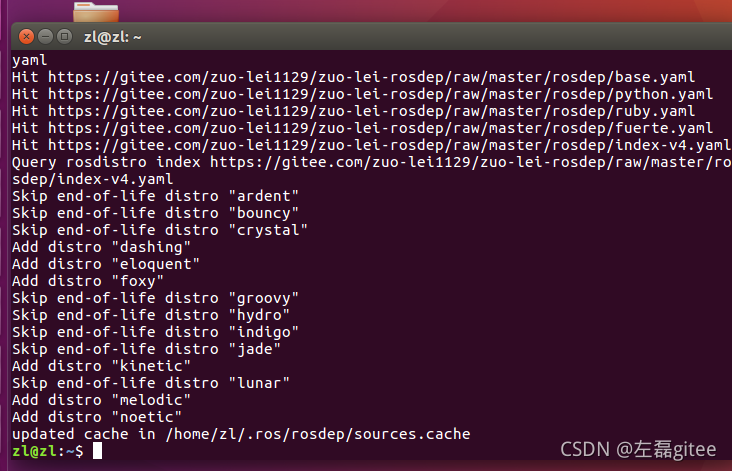
出現這樣的截圖就是成功了
如果中間有報錯 沒有鏈接成功 可以多嘗試幾次
有問題可以留言 溝通交流 或者給我發郵箱 leizuo1129@163.com
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/330080.html
標籤:AI
上一篇:? 實戰系列 ? 1?? 微信小程式自動化測驗實踐(附 Python 原始碼)??
下一篇:擊敗GANs的新生成式模型:score-based model(diffusion model)原理、網路結構、應用、代碼、實驗、展望