PC端(win10)與機器人端(ubuntu)的遠程連接
閑來垂釣碧溪上,10月12日下午我代表深圳技術大學思濤戰隊前往NXROBO創想未來公司,與該公司的工程師進行交流,向他們請教學習,此行的確獲益匪淺,在該程序中我學到了一招:在PC端與機器人端通過 共享檔案 和 映射網路驅動器 建立遠程連接,實作在PC端使用多種開發工具直接修改機器人端的代碼、共享檔案夾檔案結構等,而不需要在缺乏開發工具的機器人端安裝系列開發工具,更不需要在搭載ubuntu系統的機器人端使用落后的開發工具如gedit、記事本等,方便好用,so,分享一下操作:
1.首先通過VNC連接PC和機器人
此操作需先保證PC和機器人連接到同一個局域網或手機熱點上,由于本次比賽的機器人連接到手機熱點時運行比較流暢,所以我主要講解連接到手機熱點的操作,
PC端:
機器人端:
然后,通過在VNC輸入服務器地址和密碼,連接PC和機器人

成功連接后,可以直接在VNC中操作機器人端

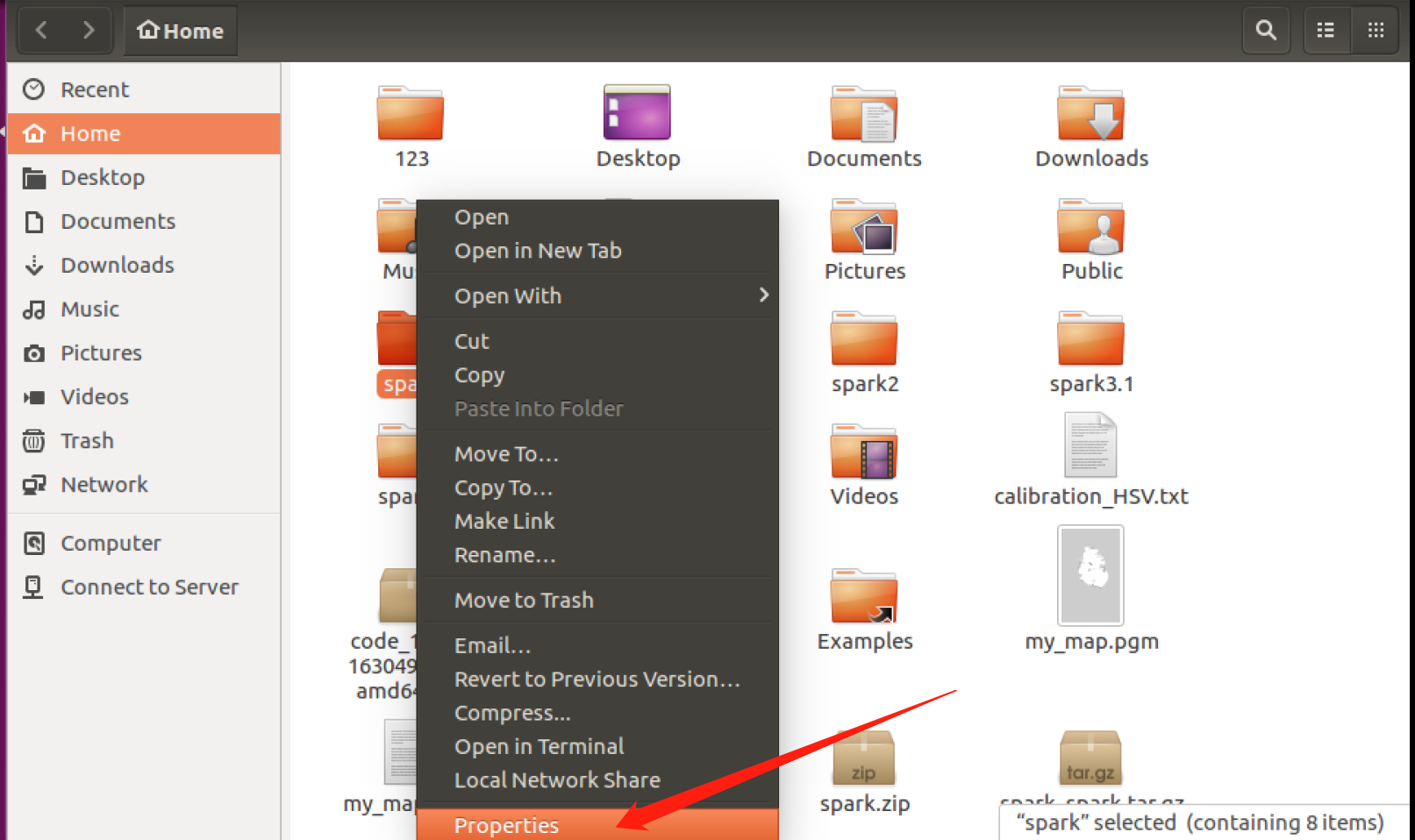
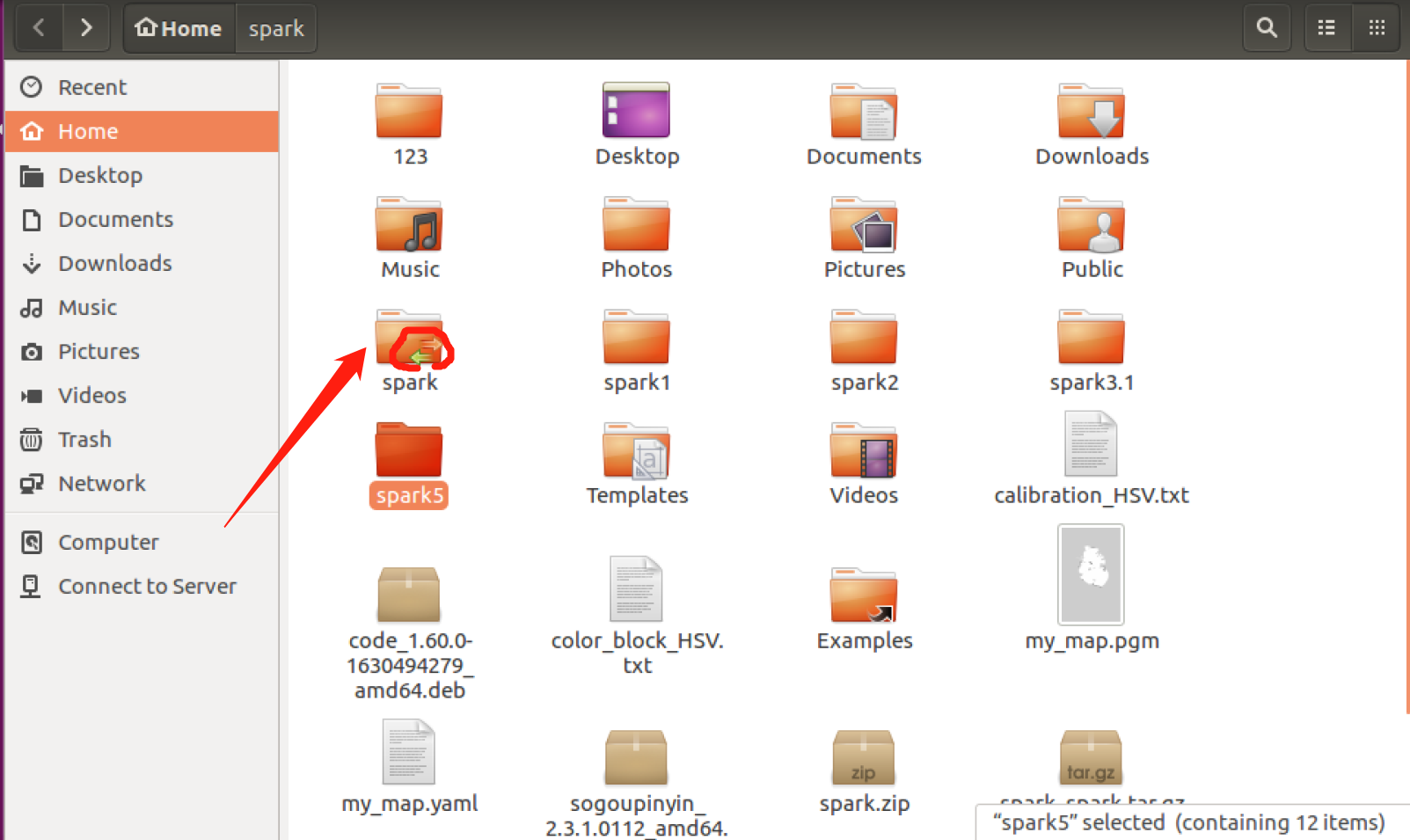
2.在VNC中打開機器人ubuntu系統的home目錄,實作共享檔案夾
首先,打開home目錄,看到很多檔案夾,此處以共享圖中的spark檔案夾為例,右鍵點擊spark檔案夾,選擇Properties選項
然后,在彈出的對話框中,依次點擊 “Local Network Share”,選中 “Share this folder”,設定 “Share name"并記住所設定的名稱,選中 ”Allow others to create and delete files in this folder" 和 “Guest access(for people without a user account”,點擊 “Create Share”,注意此處我設定的名稱不是圖中的spark,而是myspark
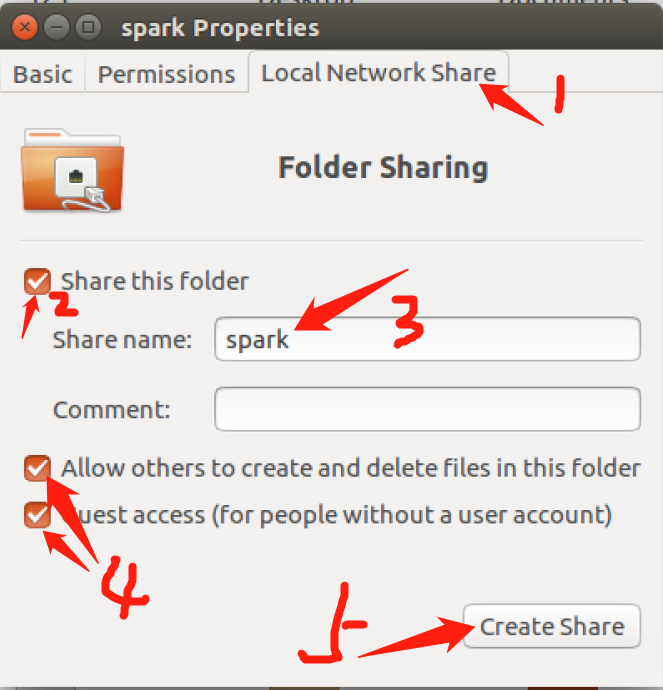
檔案夾共享成功后,原檔案夾的圖示會改變
3.在PC端的此電腦中,實作映射網路驅動器
首先,將VNC軟體最小化,右鍵點擊此電腦,選擇 “映射網路驅動器” 選項卡
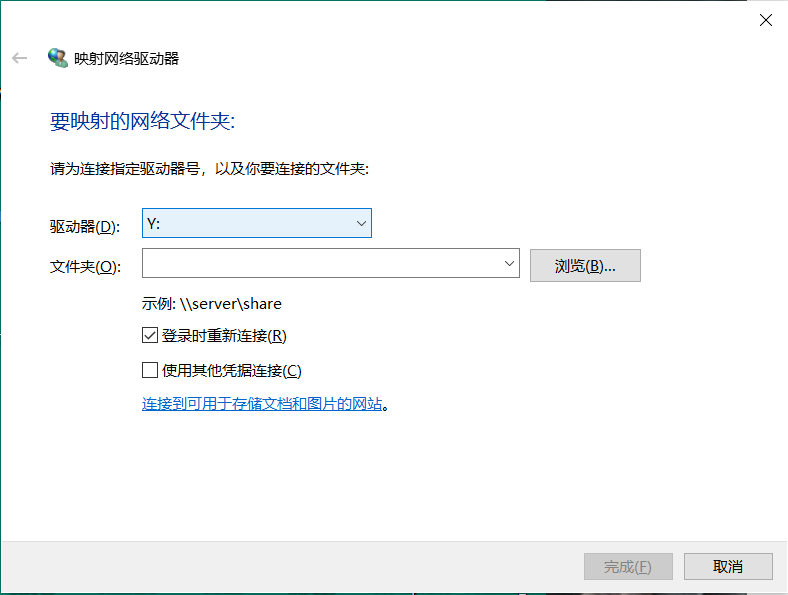
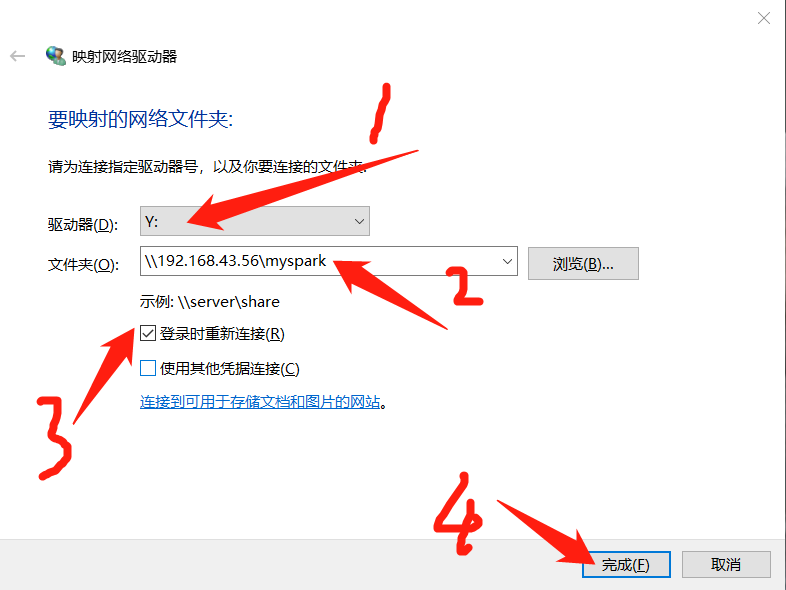
然后,任意命名驅動器,按照 \\server\share 的格式命名檔案夾(其中server與剛剛在VNC輸入的服務器地址相同,share即在VNC中創建的共享檔案夾的名稱),并選中下方的 ”登錄時重新連接“,最后點擊 ”完成“
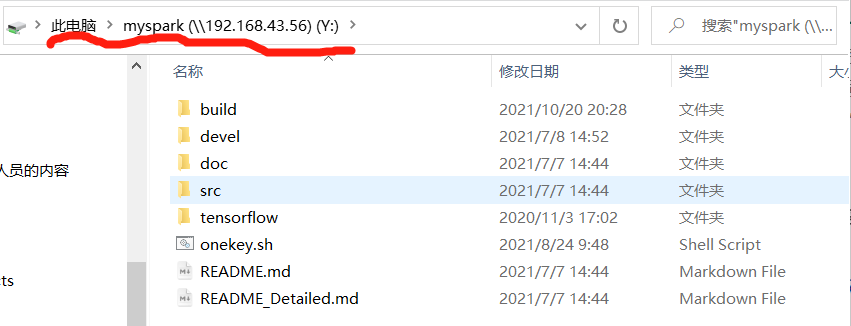
此時,PC端與機器人端通過 共享檔案 和 映射網路驅動器 成功建立遠程連接,可以在PC端使用多種開發工具如Visual Studio、Pycharm,直接修改機器人端的代碼、共享檔案夾檔案結構等,而不需要在缺乏開發工具的機器人端安裝系列開發工具,更不需要在搭載ubuntu系統的機器人端使用落后的開發工具如gedit、記事本
總結:PC端與機器人端通過共享檔案和映射網路驅動器建立遠程連接的操作確實非常實用,它不僅本身操作簡單,而且能夠大幅提高開發效率,真心不錯!
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/330294.html
標籤:其他
上一篇:手工測驗點了4年我受不了了,如何逃離難道就真的沒有辦法了?
下一篇:使用 Vue 腳手架