文章目錄
- 一、串口協議和RS-232標準
- (一)、TTL電平標準
- (二)、RS232標準
- 二、搭建STM32開發環境
- 1.安裝jdk
- 2.安裝STM32CubeMX
- 三、實作LED的點亮
- 3.1分析相應的原理圖
- 3.2使用CubeMX生成相關代碼
- 3.3實驗結果
- 四、STM32的USART串口通訊程式
- 五、通過keil觀察波形
- 六、總結
一、串口協議和RS-232標準
串口通信指串口按位(bit)發送和接收位元組,盡管比按位元組(byte)的并行通信慢,但是串口可以在使用一根線發送資料的同時用另一根線接收資料,
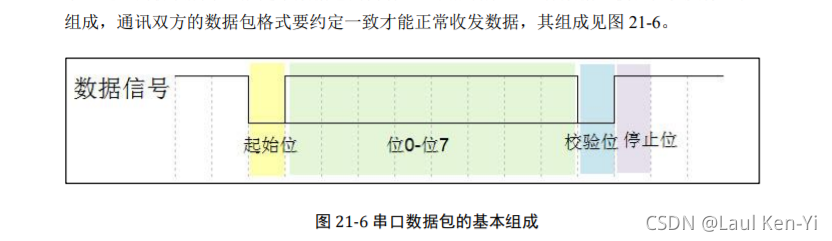
在串口通訊的協議中,規定了資料包的內容,它由啟始位、資料位、校驗位以及停止位組成,通訊雙方的資料包格式要約定一致才能正常收發資料,
RS-232(ANSI/EIA-232標準)是IBM-PC及其兼容機上的串行連接標準,可用于許多用途,比如連接滑鼠、列印機或者Modem,同時也可以接工業儀器儀表,用于驅動和連線的改進,實際應用中RS-232的傳輸長度或者速度常常超過標準的值,RS-232只限于PC串口和設備間點對點的通信,RS-232串口通信最遠距離是50英尺,
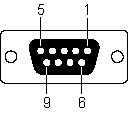
DB-9針連接頭
9針串口連介面順序圖
9針串口連介面順序圖
從計算機連出的線的截面,
RS-232針腳的功能:
資料:
TXD(pin 3):串口資料輸出(Transmit Data)
RXD(pin 2):串口資料輸入(Receive Data)
握手:
RTS(pin 7):發送資料請求(Request to Send)
CTS(pin 8):清除發送(Clear to Send)
DSR(pin 6):資料發送就緒(Data Send Ready)
DCD(pin 1):資料載波檢測(Data Carrier Detect)
DTR(pin 4):資料終端就緒(Data Terminal Ready)
地線:
GND(pin 5):地線
其他
RI(pin 9):鈴聲指示
RS232串行介面的電氣特性
資料線Txd和Rxd上邏輯電平的下定義:
●邏輯1:-3V~-15V
●邏輯0:+3V~+15V
在RTS、CTS、DSR、DTR和DCD等控制線上:
●信號有效(ON):+3V~+15V
●信號無效(OFF):-3V~-15V
由于RS232的電平定義與大部分單片機系統(各種外設都基于一個單片機系統構建)使用的TTL電平標準不相符,所以以一般單片機系統與RS232之間的連接通常都加了一個這兩種電平之間的轉換芯片,如常用的MAX232就屬于此類電平轉換芯片,
(一)、TTL電平標準
輸出 L: 《0.8V ; H:》2.4V,
輸入 L: 《1.2V ; H:》2.0V
TTL器件輸出低電平要小于0.8V,高電平要大于2.4V,輸入,低于1.2V就認為是0,高于2.0就認為是1,于是TTL電平的輸入低電平的噪聲容限就只有(0.8-0)/2=0.4V,高電平的噪聲容限為(5-2.4)/2=1.3V,
(二)、RS232標準
邏輯1的電平為-3~-15V,邏輯0的電平為+3~+15V,注意電平的定義反相了一次,
二、搭建STM32開發環境
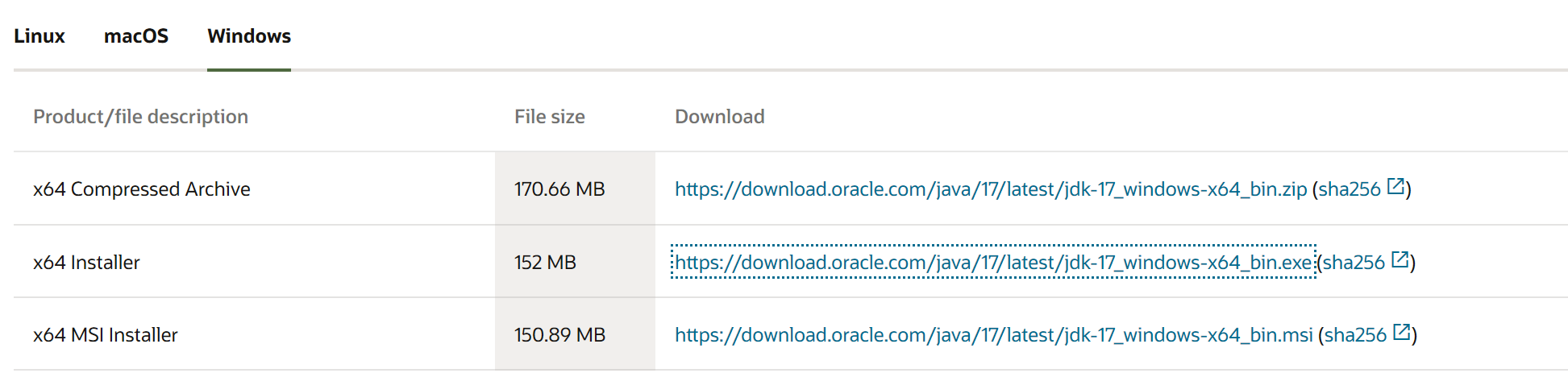
1.安裝jdk
jdk官網下載
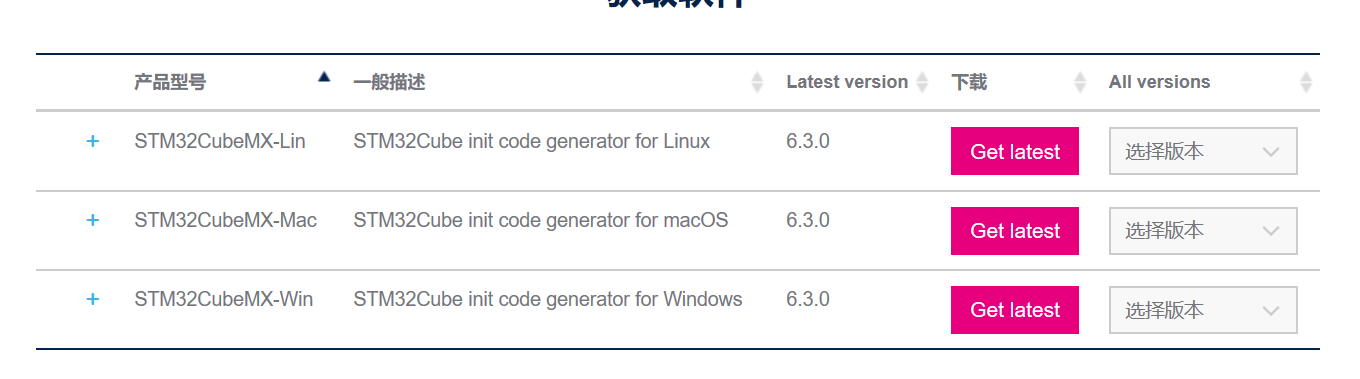
2.安裝STM32CubeMX
https://www.st.com/en/development-tools/stm32cubemx.html
安裝程序
①以管理員身份運行并安裝 SetupSTM32CubeMX-4.27.0.exe ,進入下面這個界面后,點擊Next
②點擊"I accept the terms of this license agreement",接著選擇Next
兩個都勾選,NEXT
③選擇安裝位置,默認位置是安裝在C盤中(注意:安裝位置不要出現中文)
④點擊確定
⑤選擇Next
⑥安裝完成后,選擇Next
⑦點擊Done就完成安裝
安裝韌體庫
打開cubeMX,在help下選擇manage,如果出現錯誤需要等待幾分鐘,再次點擊即可,
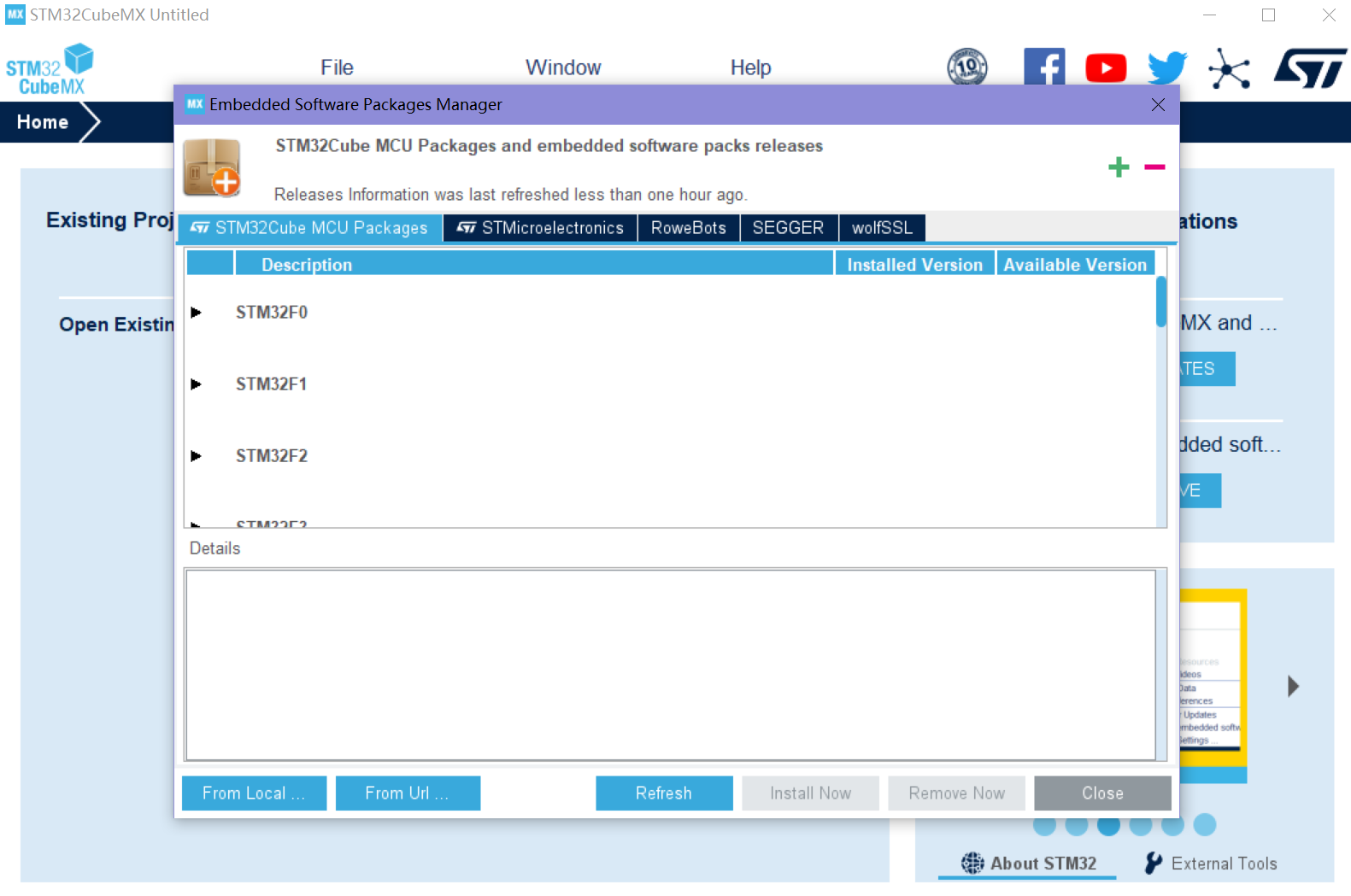
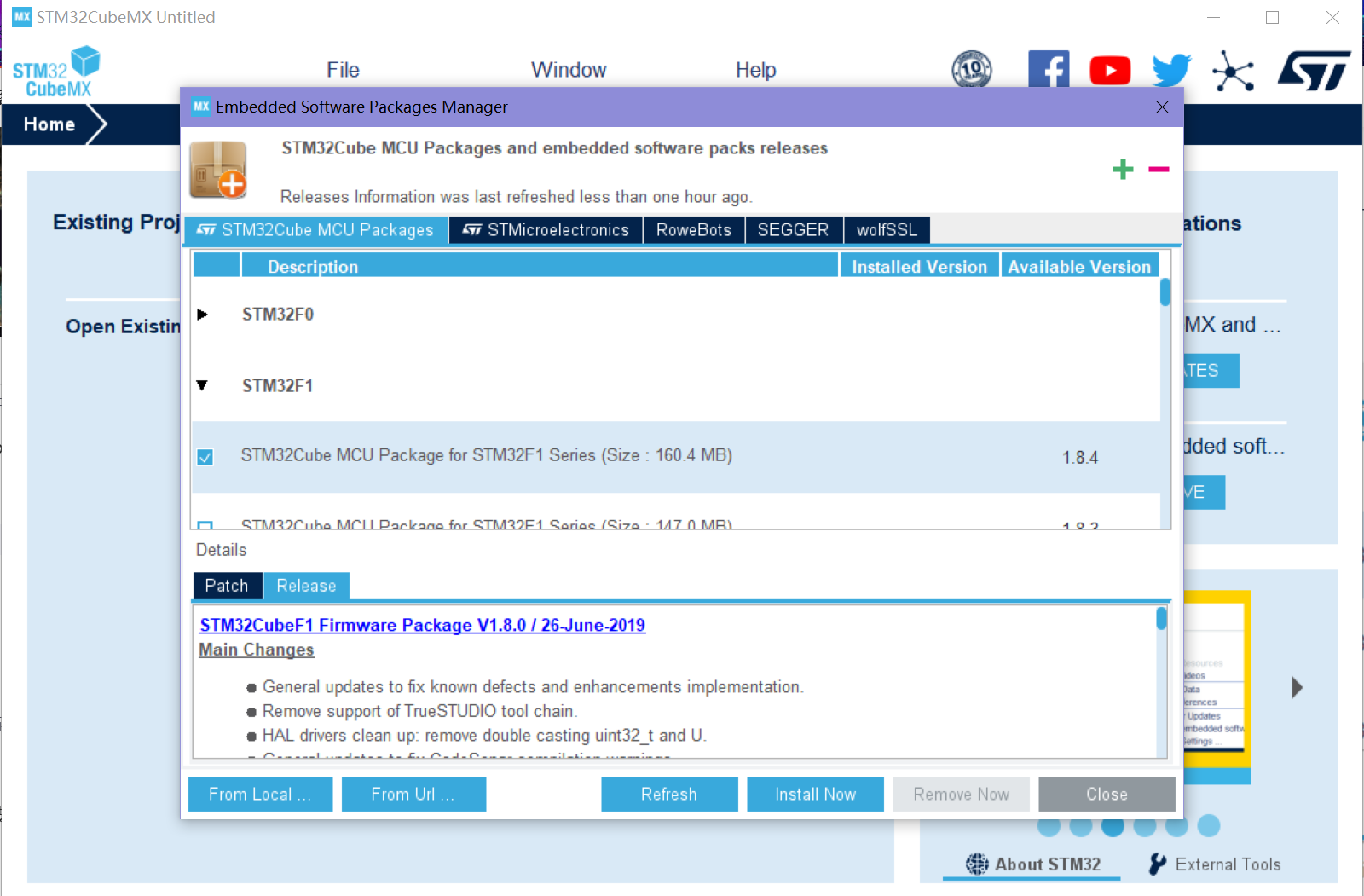
下面第一個按鈕是從本地安裝(已經在本地下載了對應的韌體庫),Install now是通過網路下載,
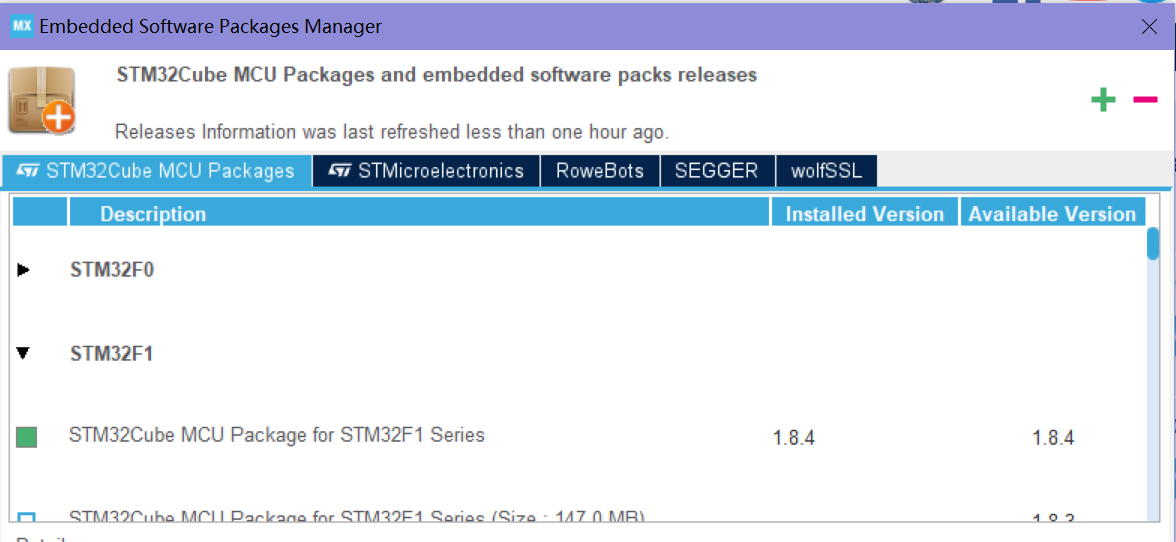
安裝成功,
三、實作LED的點亮
3.1分析相應的原理圖
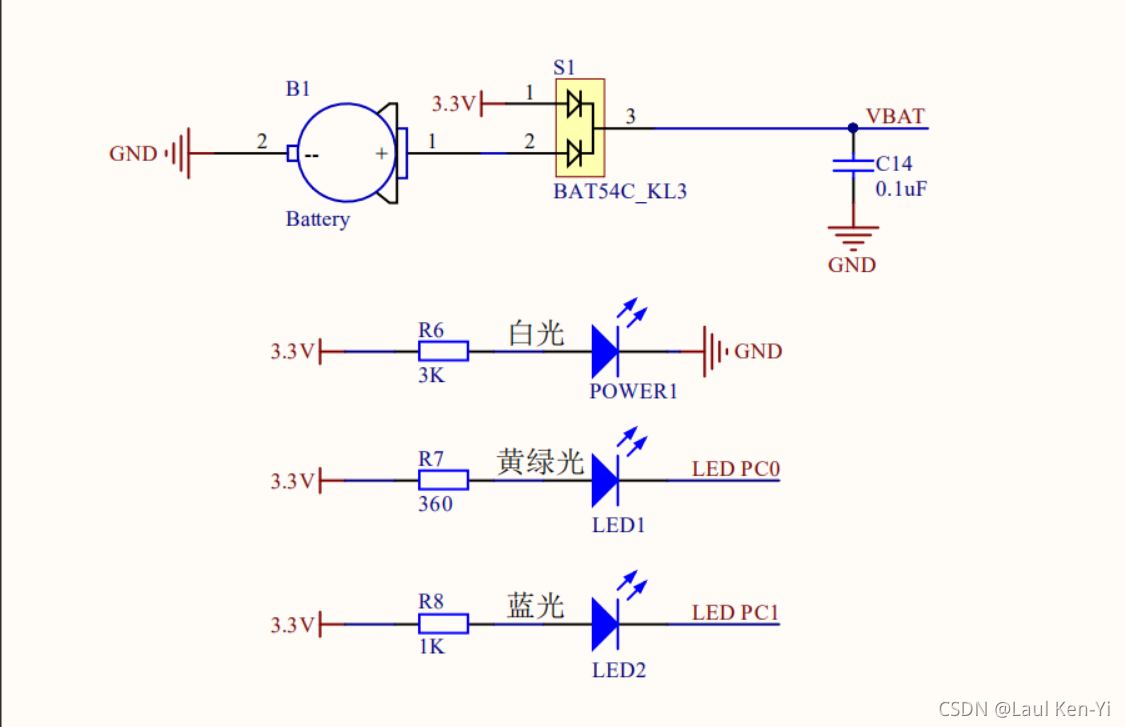
LED1為例,要實作該燈被點亮,需要將PC0輸入低電平,從而,電路接通,
3.2使用CubeMX生成相關代碼
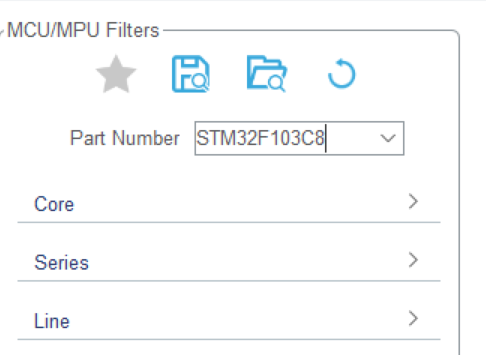
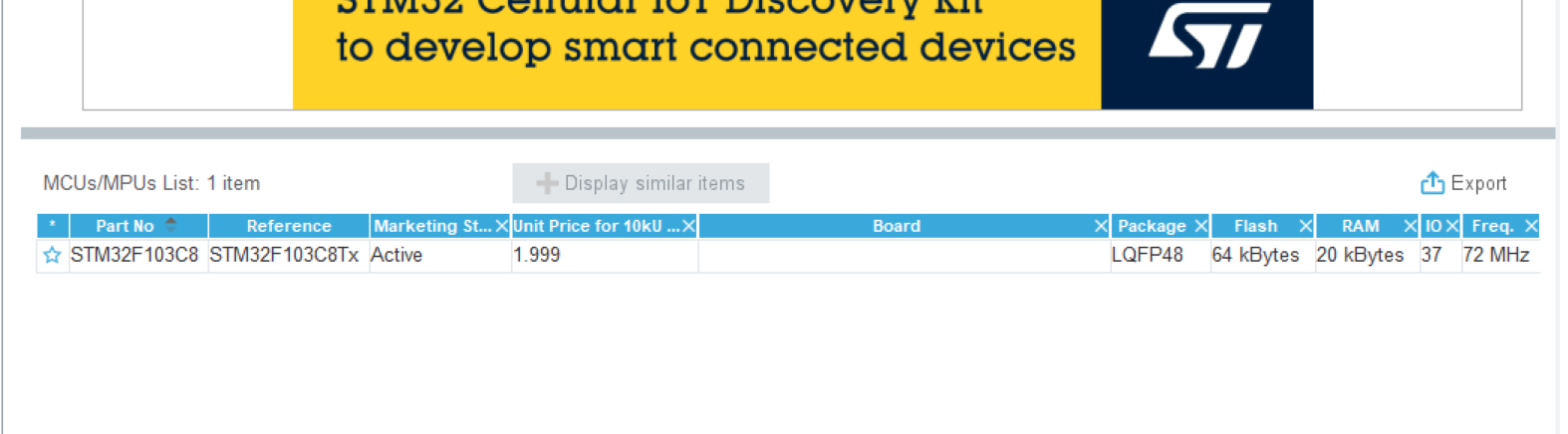
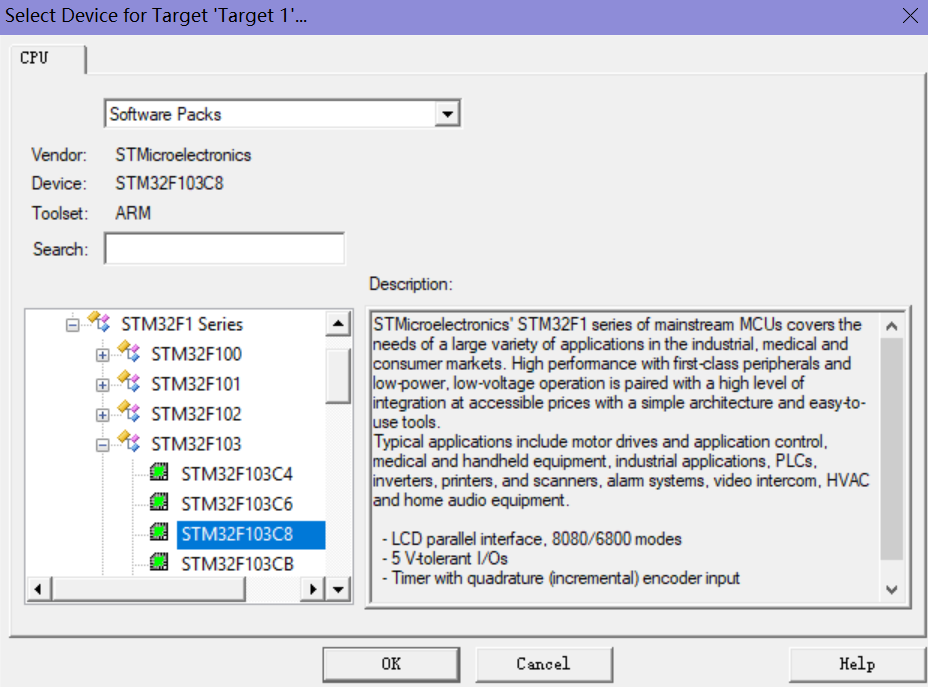
1、選擇New Project,然后選擇芯片型別
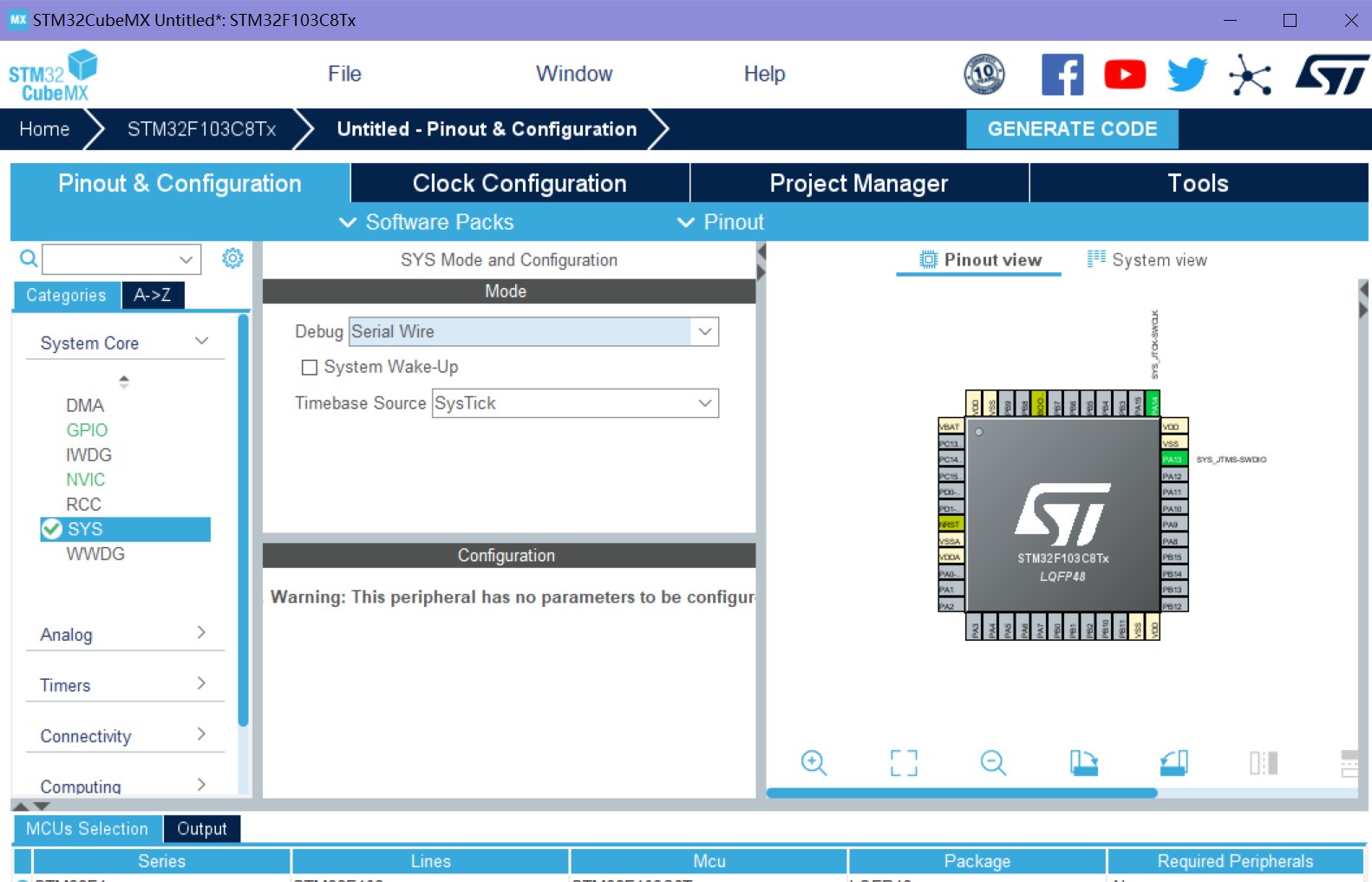
2、點擊System Core,配置系統除錯介面sys,選擇Serial Wire
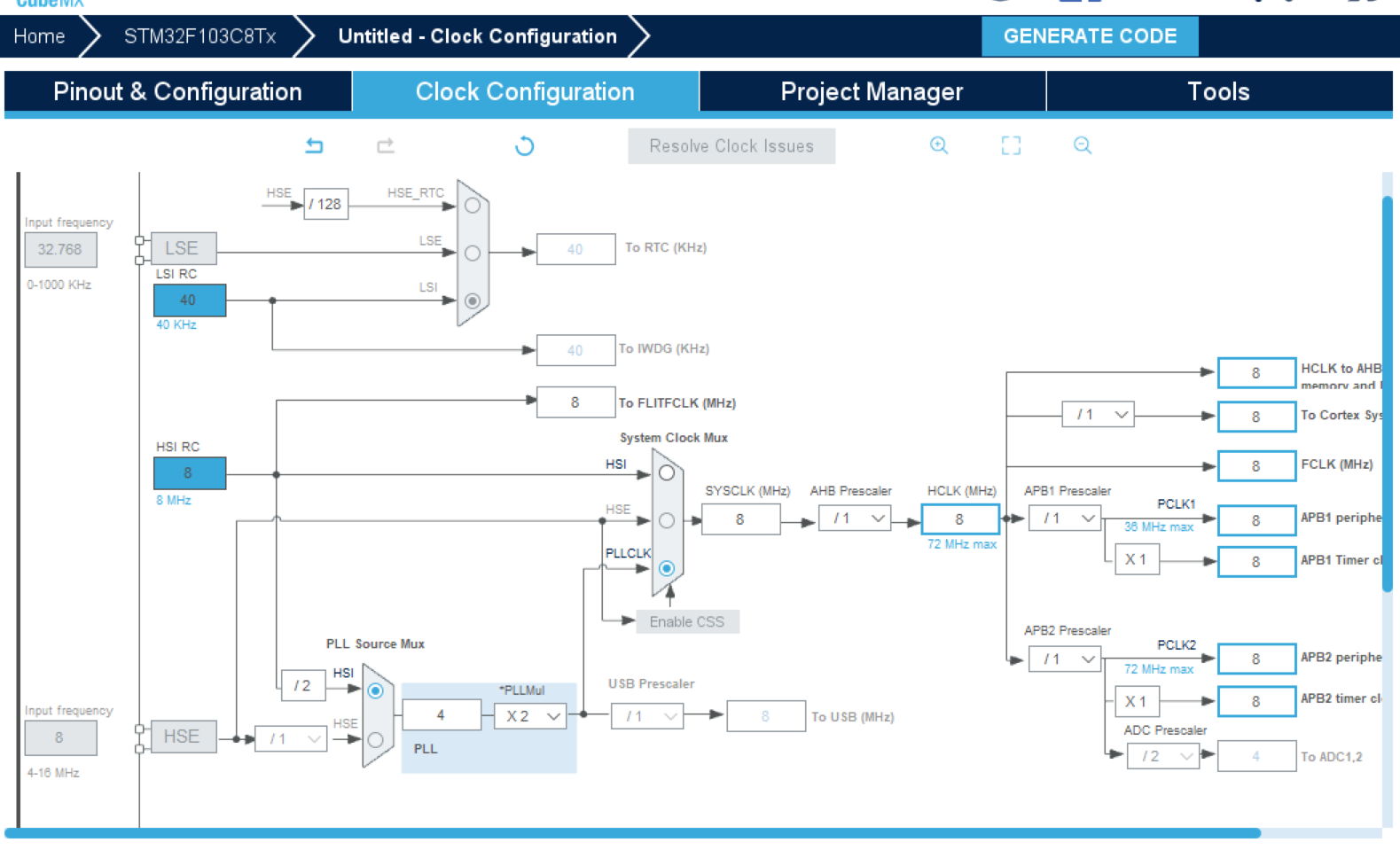
3、將system clock mux從HSI設為PLLOCK
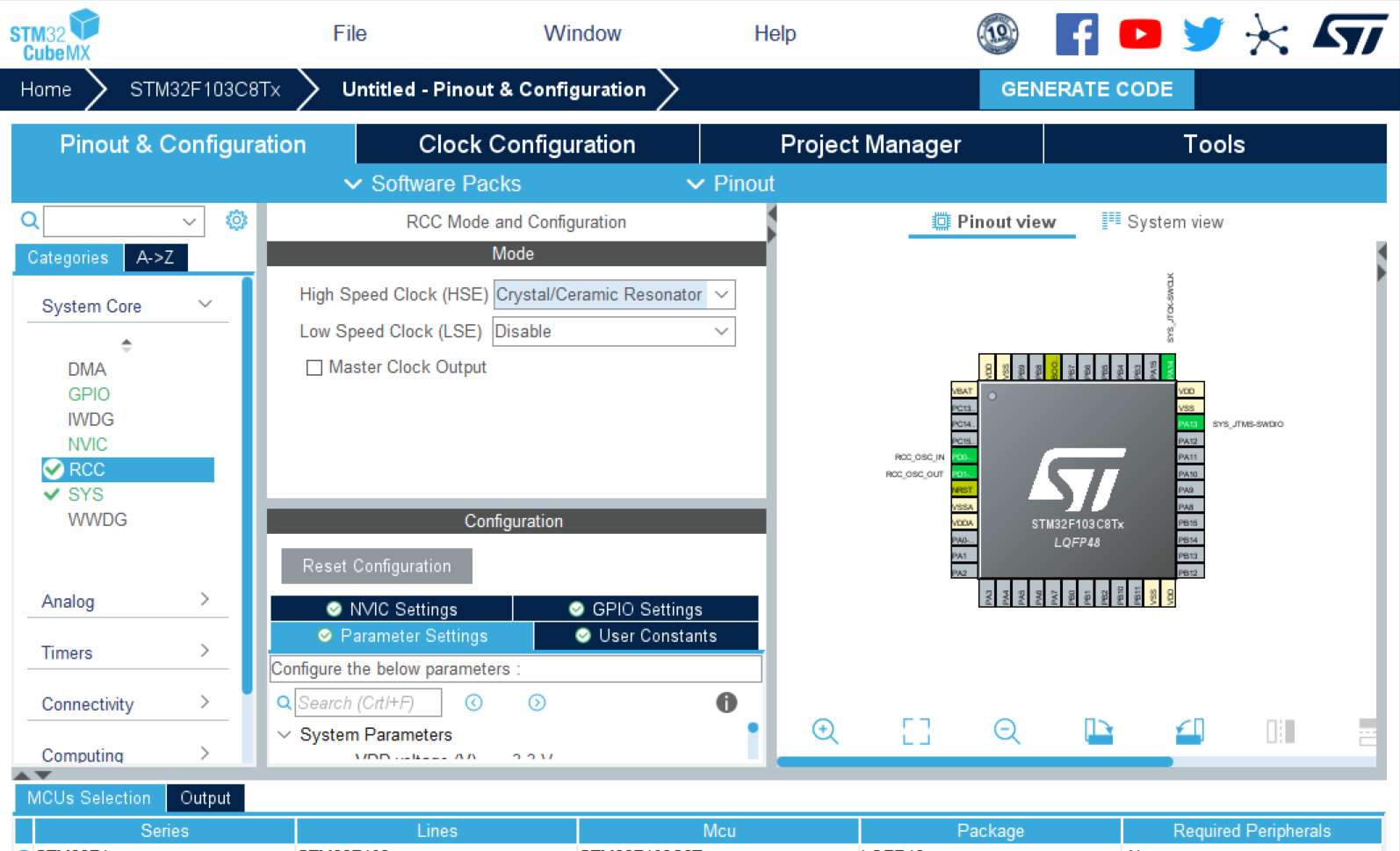
4、接下來設定時鐘RCC,在High Speed Clock選擇Crystal/Ceramic Resonator
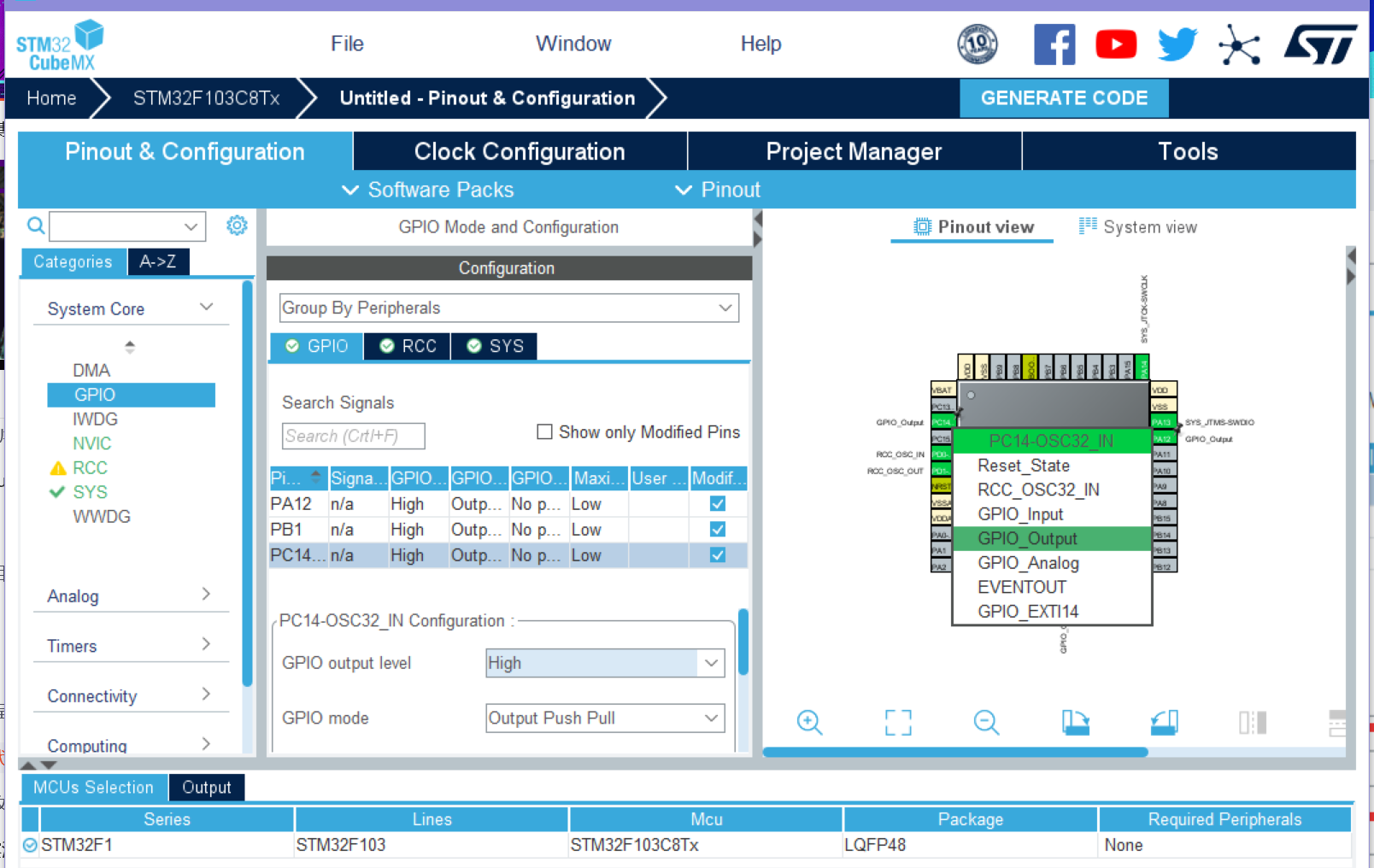
5、右邊選擇要使用到的引腳,本文主要選擇PA12,PB1,和PC14,并點擊GPIO_Output
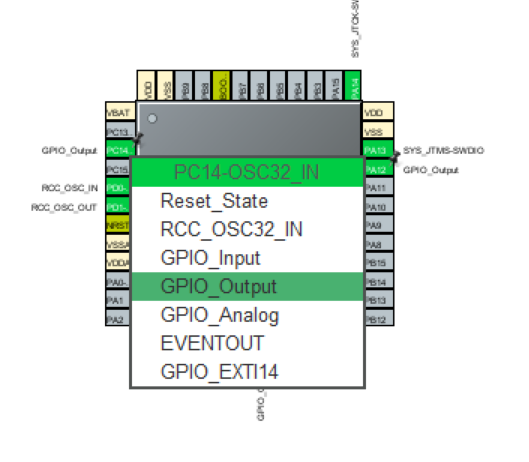
6、將GPIO output level選擇high
7、接下來建立專案project manager,輸入專案名稱和專案地址,在Toolchain/IDE選擇MDK-ARM
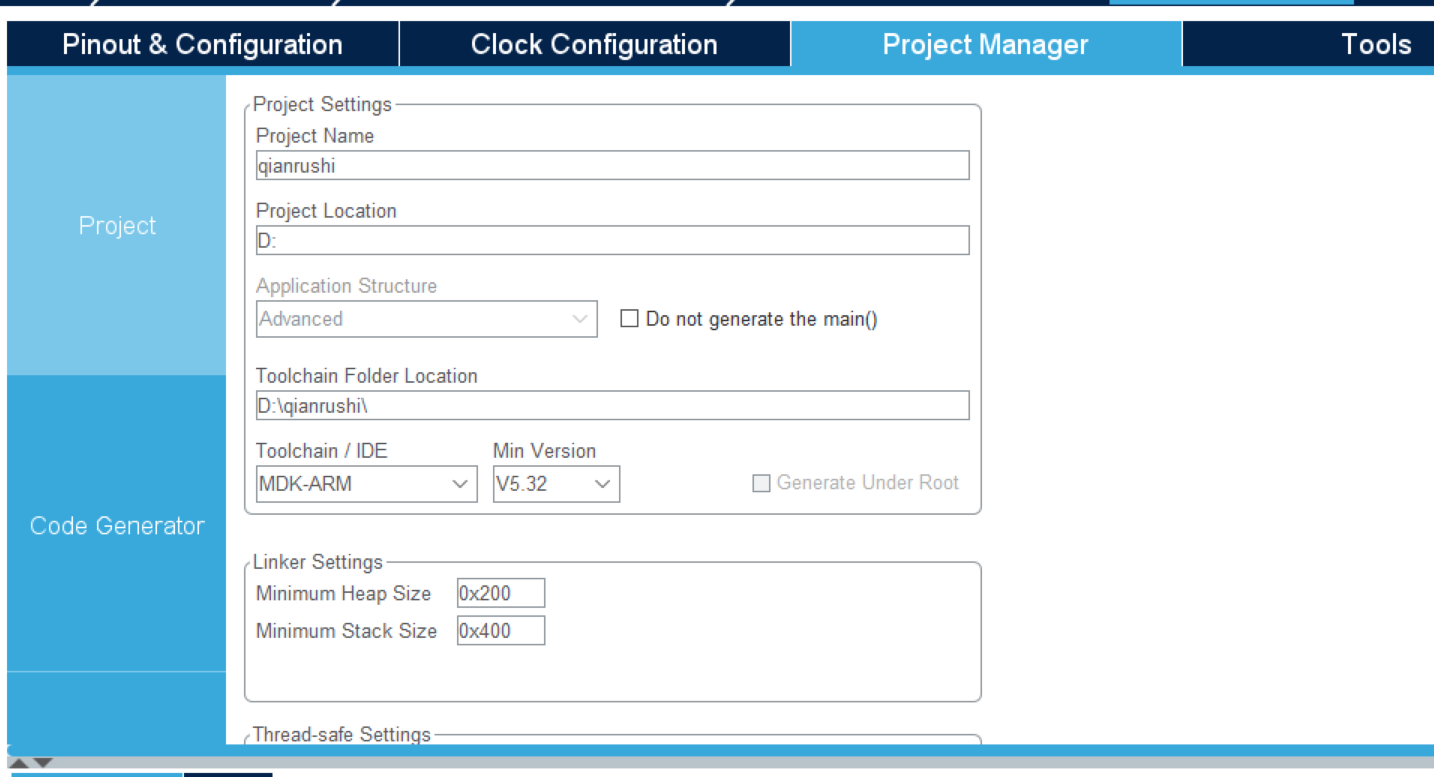
注意路徑選擇全英文
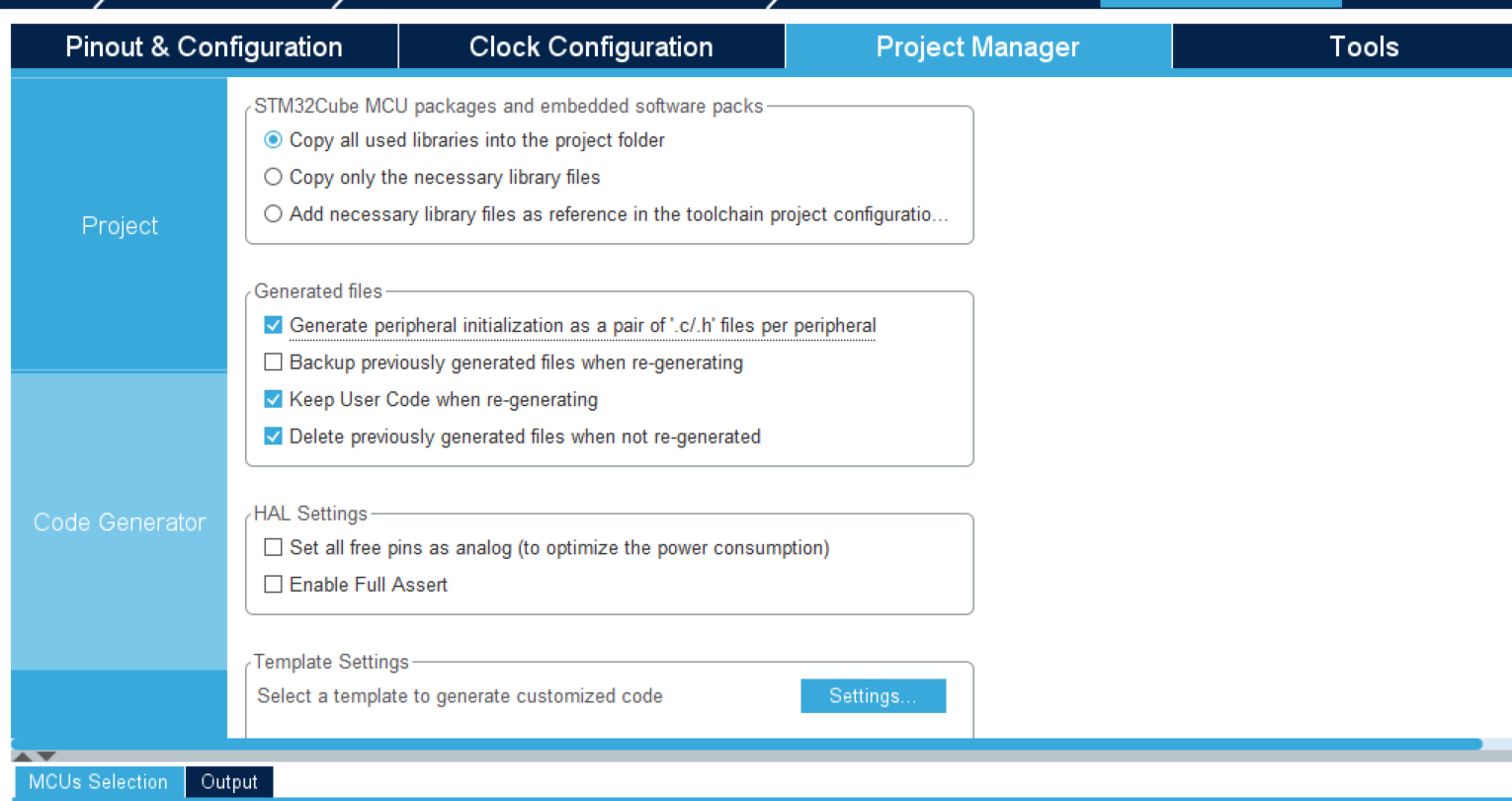
8、進入code generate界面,選擇生成初始化.c/.h檔案,后面點擊右上角generate code
9、可直接打開生成的project檔案
在while回圈中加入亮燈熄燈代碼,可直接呼叫亮燈熄燈函式,在stm32cubeMX已生成,延時函式也自動生成,500剛好對應0.5s延遲,1000則為1s
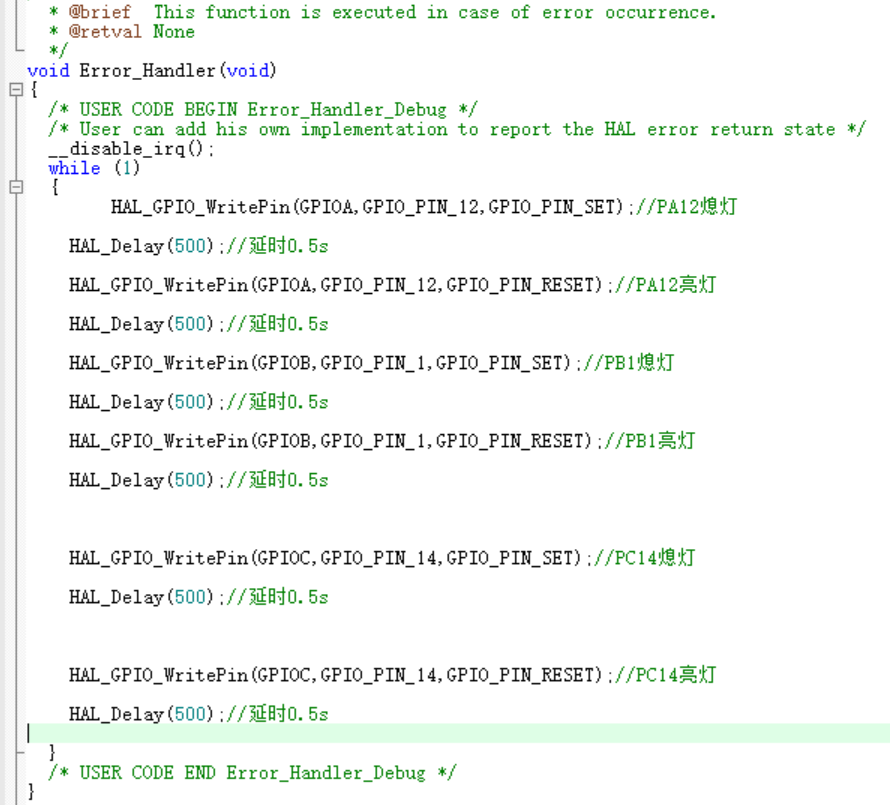
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_12,GPIO_PIN_SET);//PA12熄燈
HAL_Delay(500);//延時0.5s
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_12,GPIO_PIN_RESET);//PA12亮燈
HAL_Delay(500);//延時0.5s
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET);//PB1熄燈
HAL_Delay(500);//延時0.5s
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);//PB1亮燈
HAL_Delay(500);//延時0.5s
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_SET);//PC14熄燈
HAL_Delay(500);//延時0.5s
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_14,GPIO_PIN_RESET);//PC14亮燈
HAL_Delay(500);//延時0.5s
`
成功編譯,
參考
3.3實驗結果
四、STM32的USART串口通訊程式
完成一個STM32的USART串口通訊程式(查詢方式即可,暫不要求采用中斷方式),要求:
1)設定波特率為115200,1位停止位,無校驗位;
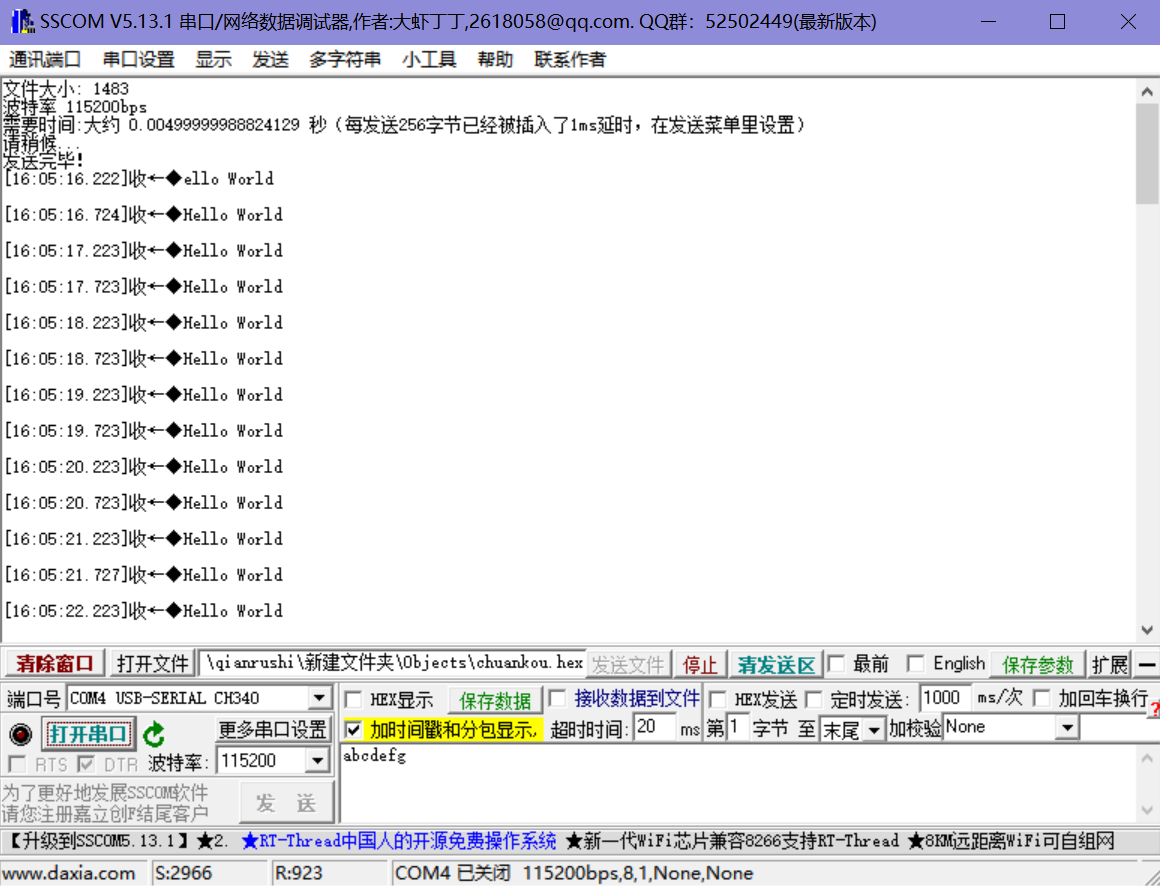
2)STM32系統給上位機(win10)連續發送“hello windows!”,win10采用“串口助手”工具接收,
1、創建一個新的工程
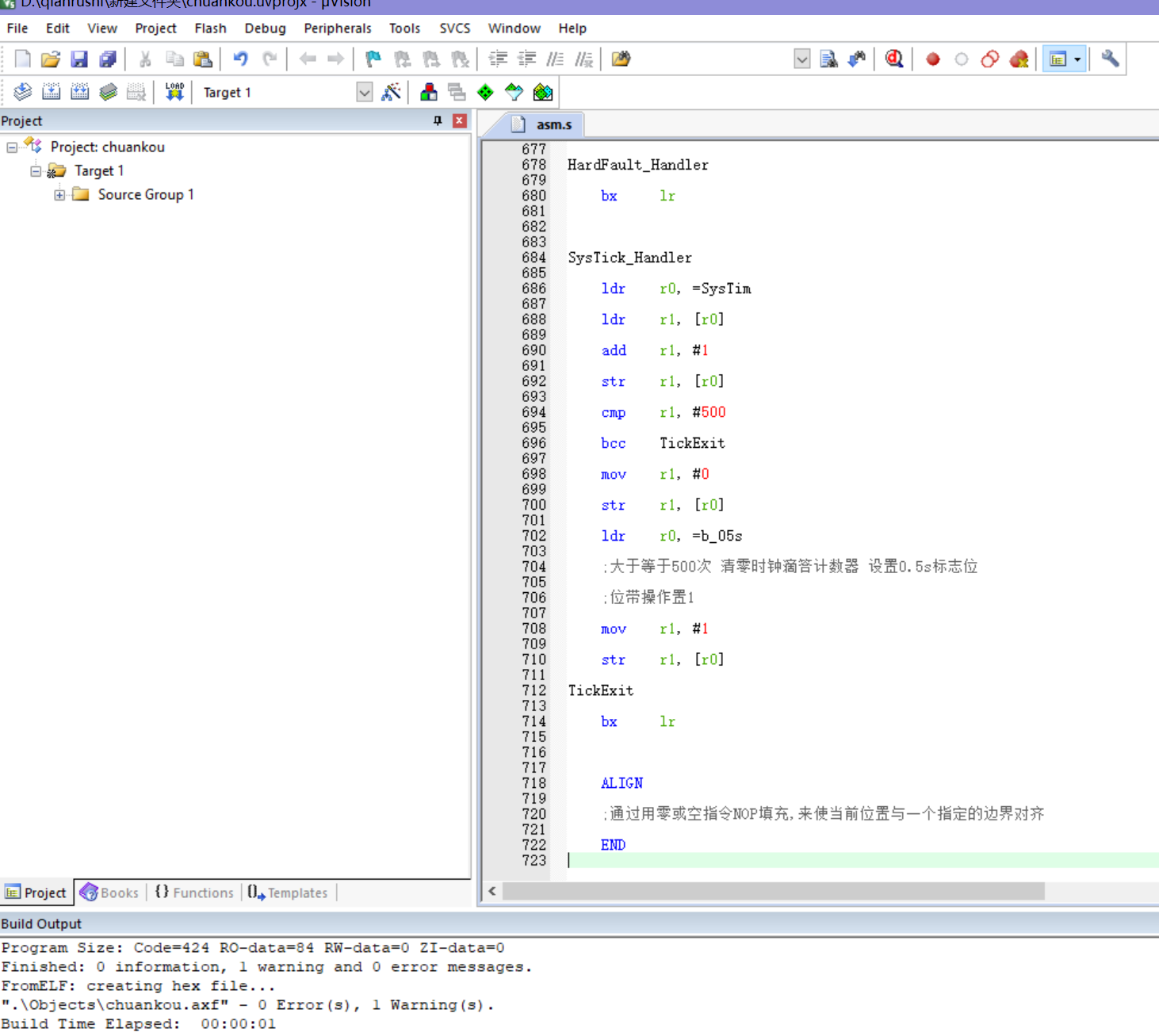
2、添加代碼
asm.s
;RCC暫存器地址映像
RCC_BASE EQU 0x40021000
RCC_CR EQU (RCC_BASE + 0x00)
RCC_CFGR EQU (RCC_BASE + 0x04)
RCC_CIR EQU (RCC_BASE + 0x08)
RCC_APB2RSTR EQU (RCC_BASE + 0x0C)
RCC_APB1RSTR EQU (RCC_BASE + 0x10)
RCC_AHBENR EQU (RCC_BASE + 0x14)
RCC_APB2ENR EQU (RCC_BASE + 0x18)
RCC_APB1ENR EQU (RCC_BASE + 0x1C)
RCC_BDCR EQU (RCC_BASE + 0x20)
RCC_CSR EQU (RCC_BASE + 0x24)
;AFIO暫存器地址映像
AFIO_BASE EQU 0x40010000
AFIO_EVCR EQU (AFIO_BASE + 0x00)
AFIO_MAPR EQU (AFIO_BASE + 0x04)
AFIO_EXTICR1 EQU (AFIO_BASE + 0x08)
AFIO_EXTICR2 EQU (AFIO_BASE + 0x0C)
AFIO_EXTICR3 EQU (AFIO_BASE + 0x10)
AFIO_EXTICR4 EQU (AFIO_BASE + 0x14)
;GPIOA暫存器地址映像
GPIOA_BASE EQU 0x40010800
GPIOA_CRL EQU (GPIOA_BASE + 0x00)
GPIOA_CRH EQU (GPIOA_BASE + 0x04)
GPIOA_IDR EQU (GPIOA_BASE + 0x08)
GPIOA_ODR EQU (GPIOA_BASE + 0x0C)
GPIOA_BSRR EQU (GPIOA_BASE + 0x10)
GPIOA_BRR EQU (GPIOA_BASE + 0x14)
GPIOA_LCKR EQU (GPIOA_BASE + 0x18)
;GPIO C口控制
GPIOC_BASE EQU 0x40011000
GPIOC_CRL EQU (GPIOC_BASE + 0x00)
GPIOC_CRH EQU (GPIOC_BASE + 0x04)
GPIOC_IDR EQU (GPIOC_BASE + 0x08)
GPIOC_ODR EQU (GPIOC_BASE + 0x0C)
GPIOC_BSRR EQU (GPIOC_BASE + 0x10)
GPIOC_BRR EQU (GPIOC_BASE + 0x14)
GPIOC_LCKR EQU (GPIOC_BASE + 0x18)
;串口1控制
USART1_BASE EQU 0x40013800
USART1_SR EQU (USART1_BASE + 0x00)
USART1_DR EQU (USART1_BASE + 0x04)
USART1_BRR EQU (USART1_BASE + 0x08)
USART1_CR1 EQU (USART1_BASE + 0x0c)
USART1_CR2 EQU (USART1_BASE + 0x10)
USART1_CR3 EQU (USART1_BASE + 0x14)
USART1_GTPR EQU (USART1_BASE + 0x18)
;NVIC暫存器地址
NVIC_BASE EQU 0xE000E000
NVIC_SETEN EQU (NVIC_BASE + 0x0010)
;SETENA暫存器陣列的起始地址
NVIC_IRQPRI EQU (NVIC_BASE + 0x0400)
;中斷優先級暫存器陣列的起始地址
NVIC_VECTTBL EQU (NVIC_BASE + 0x0D08)
;向量表偏移暫存器的地址
NVIC_AIRCR EQU (NVIC_BASE + 0x0D0C)
;應用程式中斷及復位控制暫存器的地址
SETENA0 EQU 0xE000E100
SETENA1 EQU 0xE000E104
;SysTick暫存器地址
SysTick_BASE EQU 0xE000E010
SYSTICKCSR EQU (SysTick_BASE + 0x00)
SYSTICKRVR EQU (SysTick_BASE + 0x04)
;FLASH緩沖暫存器地址映像
FLASH_ACR EQU 0x40022000
;SCB_BASE EQU (SCS_BASE + 0x0D00)
MSP_TOP EQU 0x20005000
;主堆疊起始值
PSP_TOP EQU 0x20004E00
;行程堆疊起始值
BitAlias_BASE EQU 0x22000000
;位帶別名區起始地址
Flag1 EQU 0x20000200
b_flas EQU (BitAlias_BASE + (0x200*32) + (0*4))
;位地址
b_05s EQU (BitAlias_BASE + (0x200*32) + (1*4))
;位地址
DlyI EQU 0x20000204
DlyJ EQU 0x20000208
DlyK EQU 0x2000020C
SysTim EQU 0x20000210
;常數定義
Bit0 EQU 0x00000001
Bit1 EQU 0x00000002
Bit2 EQU 0x00000004
Bit3 EQU 0x00000008
Bit4 EQU 0x00000010
Bit5 EQU 0x00000020
Bit6 EQU 0x00000040
Bit7 EQU 0x00000080
Bit8 EQU 0x00000100
Bit9 EQU 0x00000200
Bit10 EQU 0x00000400
Bit11 EQU 0x00000800
Bit12 EQU 0x00001000
Bit13 EQU 0x00002000
Bit14 EQU 0x00004000
Bit15 EQU 0x00008000
Bit16 EQU 0x00010000
Bit17 EQU 0x00020000
Bit18 EQU 0x00040000
Bit19 EQU 0x00080000
Bit20 EQU 0x00100000
Bit21 EQU 0x00200000
Bit22 EQU 0x00400000
Bit23 EQU 0x00800000
Bit24 EQU 0x01000000
Bit25 EQU 0x02000000
Bit26 EQU 0x04000000
Bit27 EQU 0x08000000
Bit28 EQU 0x10000000
Bit29 EQU 0x20000000
Bit30 EQU 0x40000000
Bit31 EQU 0x80000000
;向量表
AREA RESET, DATA, READONLY
DCD MSP_TOP ;初始化主堆疊
DCD Start ;復位向量
DCD NMI_Handler ;NMI Handler
DCD HardFault_Handler ;Hard Fault Handler
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD SysTick_Handler ;SysTick Handler
SPACE 20 ;預留空間20位元組
;代碼段
AREA |.text|, CODE, READONLY
;主程式開始
ENTRY
;指示程式從這里開始執行
Start
;時鐘系統設定
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit16
str r1, [r0]
;開啟外部晶振使能
;啟動外部8M晶振
ClkOk
ldr r1, [r0]
ands r1, #Bit17
beq ClkOk
;等待外部晶振就緒
ldr r1,[r0]
orr r1,#Bit17
str r1,[r0]
;FLASH緩沖器
ldr r0, =FLASH_ACR
mov r1, #0x00000032
str r1, [r0]
;設定PLL鎖相環倍率為7,HSE輸入不分頻
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
str r1, [r0]
;啟動PLL鎖相環
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit24
str r1, [r0]
PllOk
ldr r1, [r0]
ands r1, #Bit25
beq PllOk
;選擇PLL時鐘作為系統時鐘
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
orr r1, #Bit1
str r1, [r0]
;其它RCC相關設定
ldr r0, =RCC_APB2ENR
mov r1, #(Bit14 :OR: Bit4 :OR: Bit2)
str r1, [r0]
;PA9串口0發射腳
ldr r0, =GPIOA_CRH
ldr r1, [r0]
orr r1, #(Bit4 :OR: Bit5)
;PA.9輸出模式,最大速度50MHz
orr r1, #Bit7
and r1, #~Bit6
;10:復用功能推挽輸出模式
str r1, [r0]
ldr r0, =USART1_BRR
mov r1, #0x271
str r1, [r0]
;配置波特率-> 115200
ldr r0, =USART1_CR1
mov r1, #0x200c
str r1, [r0]
;USART模塊總使能 發送與接收使能
;71 02 00 00 2c 20 00 00
;AFIO 引數設定
;Systick 引數設定
ldr r0, =SYSTICKRVR
;Systick裝初值
mov r1, #9000
str r1, [r0]
ldr r0, =SYSTICKCSR
;設定,啟動Systick
mov r1, #0x03
str r1, [r0]
;切換成用戶級執行緒式模式
ldr r0, =PSP_TOP
;初始化執行緒堆疊
msr psp, r0
mov r0, #3
msr control, r0
;初始化SRAM暫存器
mov r1, #0
ldr r0, =Flag1
str r1, [r0]
ldr r0, =DlyI
str r1, [r0]
ldr r0, =DlyJ
str r1, [r0]
ldr r0, =DlyK
str r1, [r0]
ldr r0, =SysTim
str r1, [r0]
;主回圈
main
ldr r0, =Flag1
ldr r1, [r0]
tst r1, #Bit1
;SysTick產生0.5s,置位bit 1
beq main ;0.5s標志還沒有置位
;0.5s標志已經置位
ldr r0, =b_05s
;位帶操作清零0.5s標志
mov r1, #0
str r1, [r0]
mov r0, #'H'
bl send_a_char
mov r0, #'e'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #' '
bl send_a_char
mov r0, #'W'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #'r'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'d'
bl send_a_char
mov r0, #'\n'
bl send_a_char
b main
;子程式 串口1發送一個字符
send_a_char
push {r0 - r3}
ldr r2, =USART1_DR
str r0, [r2]
b1
ldr r2, =USART1_SR
ldr r2, [r2]
tst r2, #0x40
beq b1
;發送完成(Transmission complete)等待
pop {r0 - r3}
bx lr
;例外程式
NMI_Handler
bx lr
HardFault_Handler
bx lr
SysTick_Handler
ldr r0, =SysTim
ldr r1, [r0]
add r1, #1
str r1, [r0]
cmp r1, #500
bcc TickExit
mov r1, #0
str r1, [r0]
ldr r0, =b_05s
;大于等于500次 清零時鐘滴答計數器 設定0.5s標志位
;位帶操作置1
mov r1, #1
str r1, [r0]
TickExit
bx lr
ALIGN
;通過用零或空指令NOP填充,來使當前位置與一個指定的邊界對齊
END
生成hex檔案
3、燒錄與接收
此時是在boot0為1情況下燒錄,開串口除錯助手,首先打開剛剛生成的hex檔案,再點擊發送檔案,波特率默認是115200,1位停止位,無校驗位,接著將boot0置0,點擊reset即可接收到hello world.
五、通過keil觀察波形
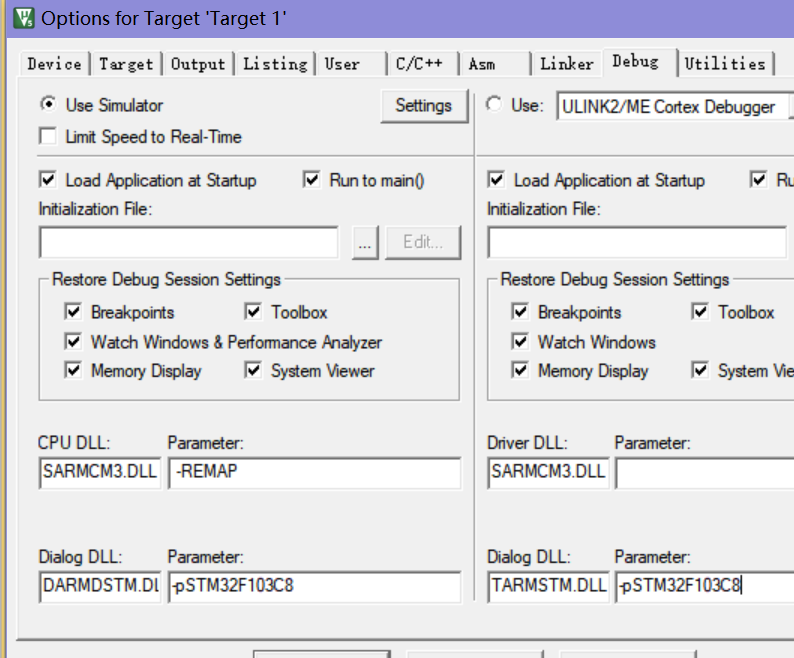
- 環境設定
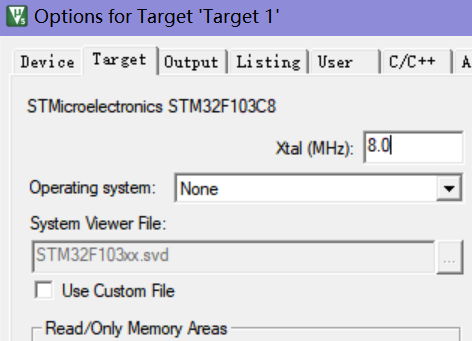
設定除錯的引數,該程式是在無硬體條件下進行的仿真注意Dialog和Parameter
進入除錯模式,并打開邏輯分析功能,選擇setup,創建引腳
設定引腳名稱和展示資料型別為bit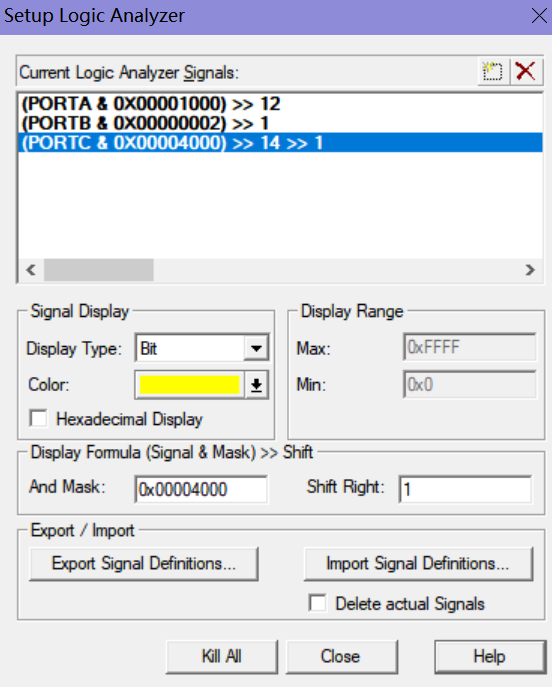
可以看出三個引腳在周期為0.5s交替出現,從而實作流水燈的閃爍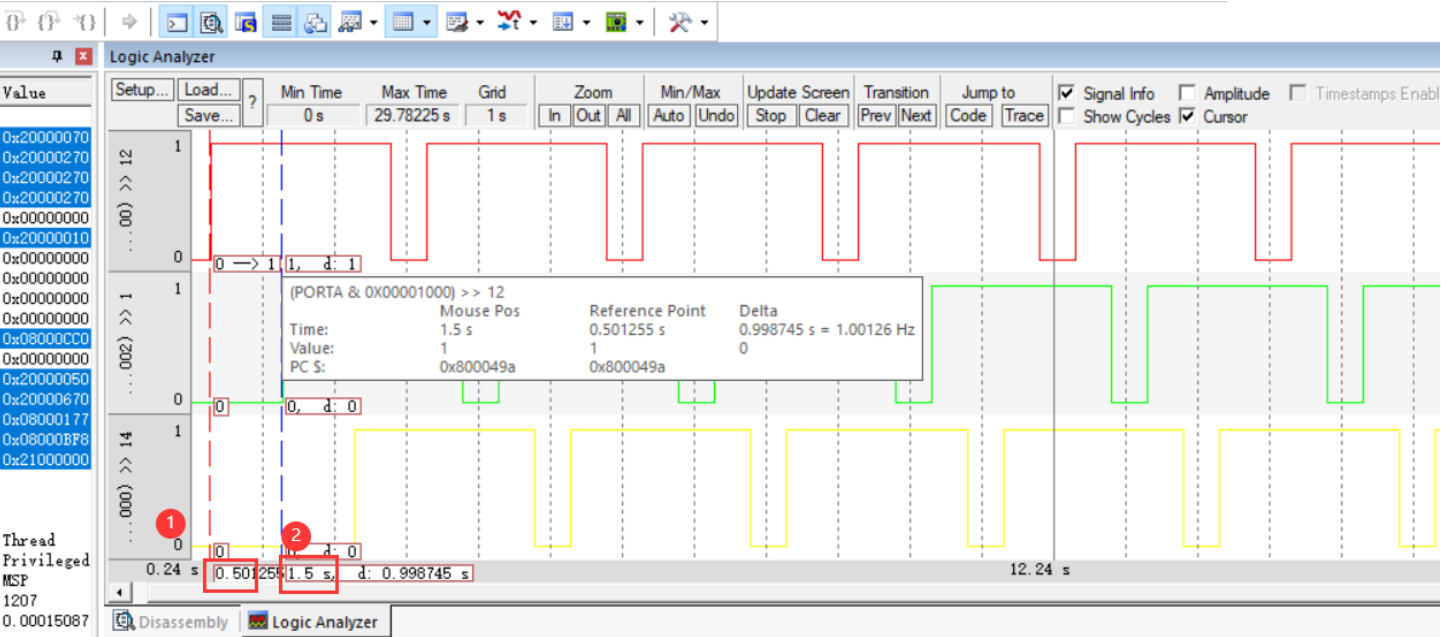
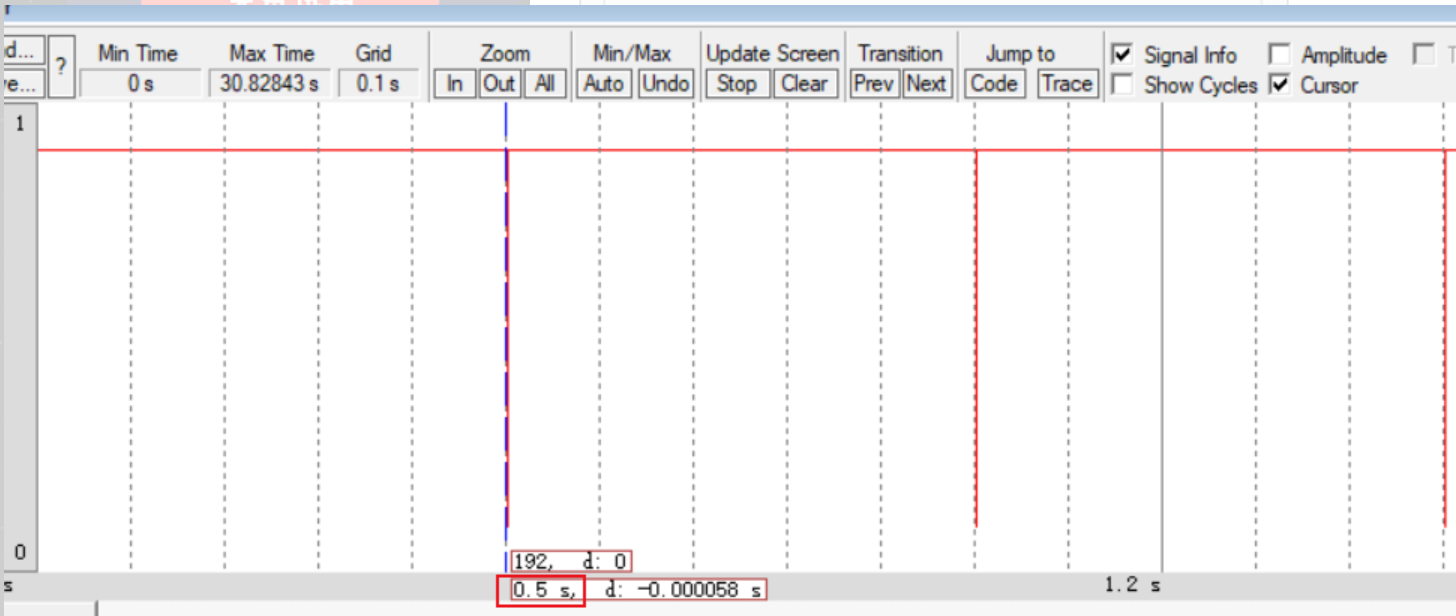
可以看出燒錄的hello world程式的周期為0.5s,每相隔0.5s電平就會變化,從而周期性的輸出
六、總結
本次實驗學習了STMCubeMX的使用,這些工具極大地簡化了操作程序和減少了錯誤的產生,使用Keil的軟體仿真邏輯分析儀功能觀察管腳的時序波形,更方便動態跟蹤除錯和定位代碼故障點, 也可以反映的時序狀態正確與否,高低電平轉換周期(LED閃爍周期)實際為多少,更好的利用這些工具和方法可以讓我們的實驗效率更高,
參考:
搭建STM32開發環境——STM32CubeMX,Keil5
基于 MDK 創建 STM32 匯編程式:串口輸出 Hello world
https://blog.csdn.net/qq_60678931/article/details/120842390?spm=1001.2014.3001.5501
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/337800.html
標籤:其他
上一篇:“如果不能在一個月內寫出作業系統,那你就是個笨蛋!”
下一篇:HAL庫實作流水燈