圖形 4.3 實時陰影簡介
- 總結實時陰影的優化方案
- 一.Shadow Mapping 系列技術
- 1.unity的實時陰影實作(PCF Soft Shadow)
- 1.1渲染視空間深度渲染
- 1.2.光源的shadow map渲染
- 1.3.陰影收集計算(Shadows Collector)
- 1.4優化部分
- 1.4.1自陰影問題解決
- 1.4.2陰影映射形成的走樣問題
- 1.4.3重采樣誤差--Percentage Closer Filtering(PCF)濾波方式解決
- 2.Percentage Closer Soft Shadows(PCSS)
- 2.1觀察解釋
- 2.2 Penumbra Size(半影尺寸):理解PCF與PCSS核心區別關鍵
- 2.3 分塊研究--演算法核心(如何獲取遮擋物 Blocker Search 步驟)
- 2.4 PCSS 演算法程序
- 3 針對PCSS與PCF演算法的多重采樣優化:Variance Soft Shadow Mapping(VSSM)
- 3.1 一句話概括
- 3.2 概論(VSSM與PDF與CDF)
- 3.3 補充說明
- 3.3.1計算平均值 & 方差
- 3.3.2 計算累計分布函式(CDF)
- 3.3.3 加速 VSSM (Blocker Search )演算法
- 3.3.4 VSSM 的缺陷
- 4. 解決VSSM缺陷演算法--Moment Shadow Mapping
- 二. Distance Field Soft Shadows(有向距離場的軟陰影)
- 1. Distance Field Soft Shadows主要想法:
- 2. Distance Field Soft Shadows 演算法程序
- 3. 一步一步慢慢說
- 3.1 Signed Distance Field(有向距離場)
- 3.2 Sphere Tracing(跟蹤范圍)
- 3.3 Distance Field Soft Shadows(有向距離場的軟陰影)的優化
- 進一步優化
- 4. 使用 Distance Field Soft Shadows 的優劣
- 實時陰影系統實作
鏈接: 圖形 4.3 實時陰影介紹筆記.
總結實時陰影的優化方案
一.Shadow Mapping 系列技術
1.unity的實時陰影實作(PCF Soft Shadow)
參考鏈接: Unity實時陰影實作—Shadow Mapping-YOung(知乎).
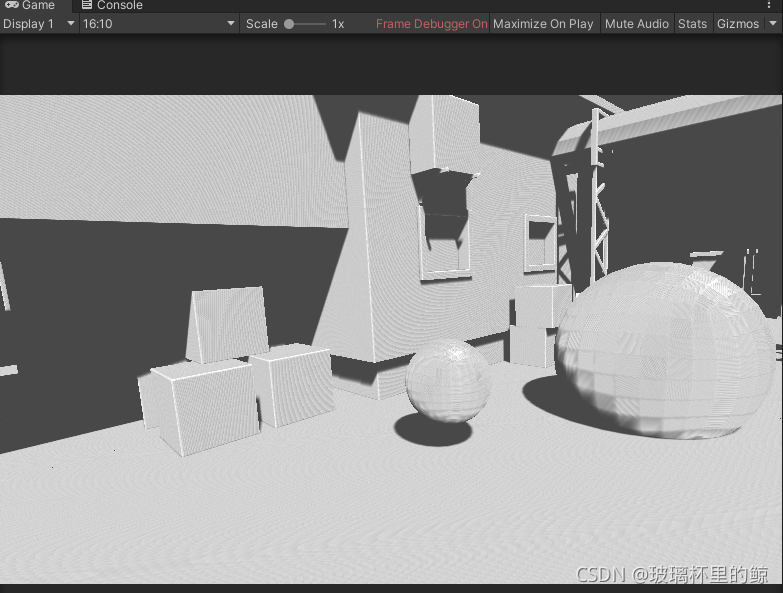
使用SSAO專案的場景(為顯示陰影,著色器材質修改為只接受與產生陰影)
效果顯示
1.1渲染視空間深度渲染
1.2.光源的shadow map渲染
1.3.陰影收集計算(Shadows Collector)
1.get√螢屏空間深度,2.get√光源的Shadow Map,3.將二者轉到光源空間進行比較,繪制物體時,用物體螢屏坐標UV采樣3中生產螢屏空間陰影貼圖,
1.4優化部分
1.4.1自陰影問題解決
在燈光設定中,針對陰影映射解析度問題的優化,Biasl/Depth Bias/Normal Bias
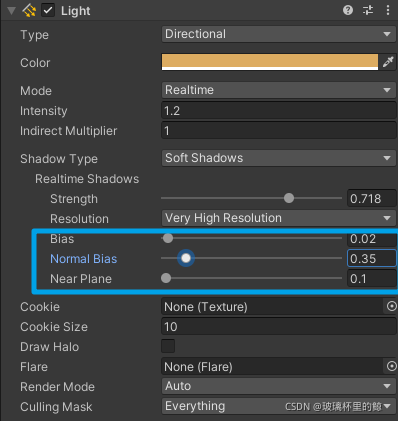
效果:
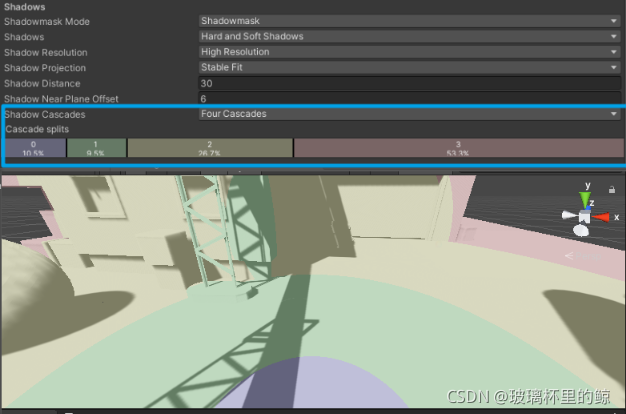
1.4.2陰影映射形成的走樣問題
級聯陰影映射 shader cascades
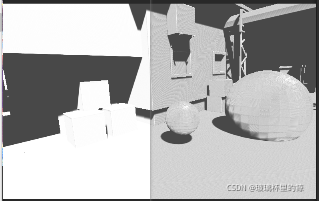
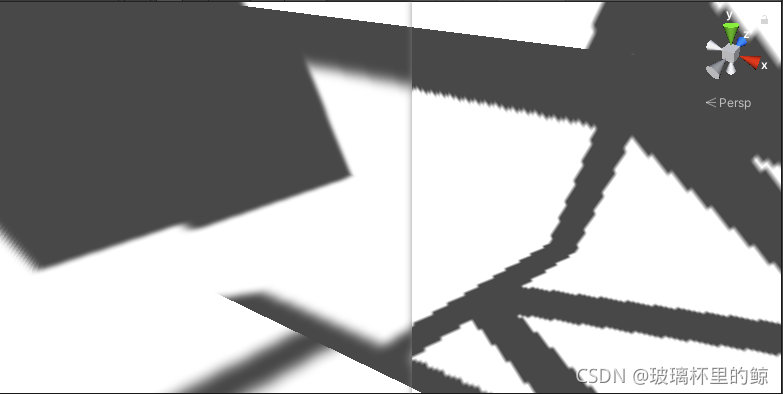
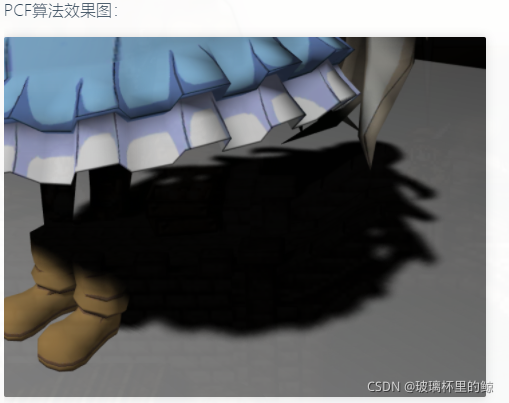
1.4.3重采樣誤差–Percentage Closer Filtering(PCF)濾波方式解決
關于濾波知識,查看往期課程或查看GAMES101第6節課以及GAMES202實時陰影部分,
左開啟:Soft Shadows(Unity中這樣寫,但不是真實軟陰影),右:Hard Shadows
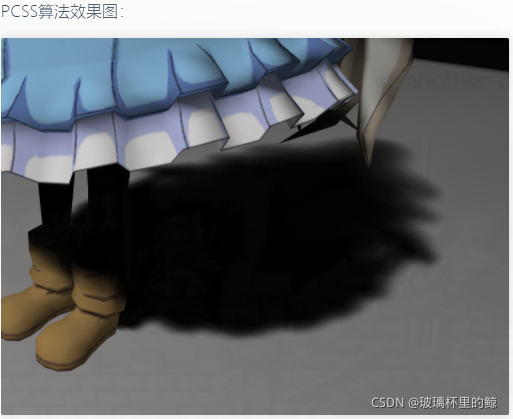
2.Percentage Closer Soft Shadows(PCSS)
(參考自博客園-KillerAery.)
2.1觀察解釋
Shadow Mapping 還存在硬陰影(Hard Shadow)的問題,因為現實世界的影子往往是軟陰影(Soft Shadow),
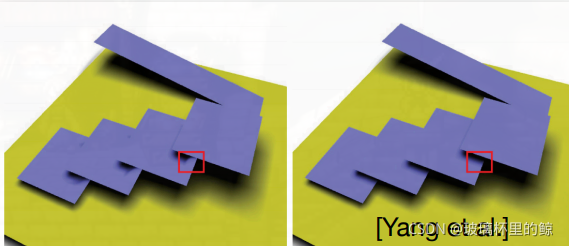
一個現實觀察是,當投影物與陰影之間的距離越遠,則陰影越軟(如下圖:筆尖陰影由于與筆尖的距離較近,因此陰影邊緣較為銳利;而遠處筆身陰影則因與筆身距離較遠,陰影邊緣較為發散且模糊),
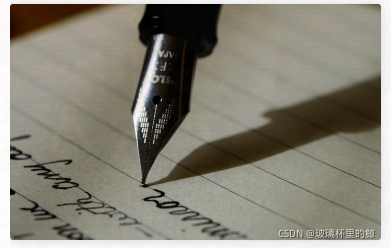
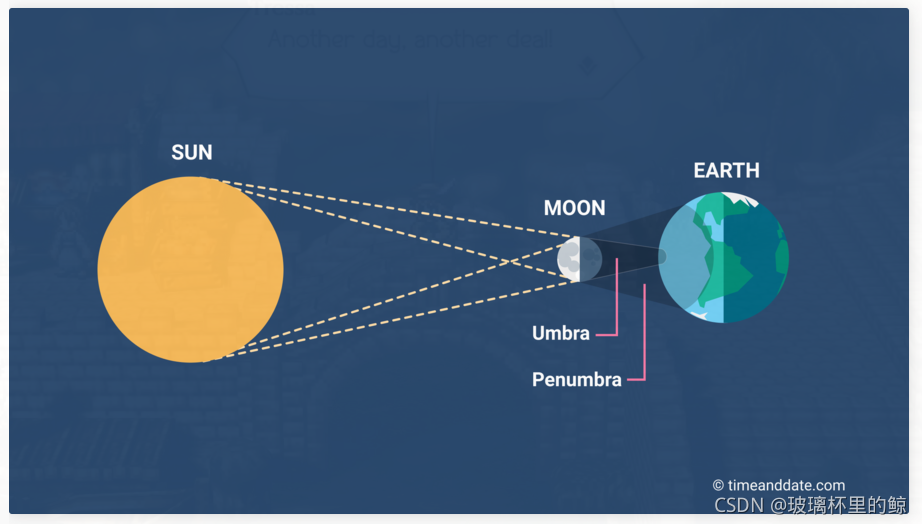
這是因為較大的光源面會有一些區域被遮蔽一部分光又接受一部分光,從而產生半影(Penumbra),直觀看就是沒那么暗的邊緣處陰影,
2.2 Penumbra Size(半影尺寸):理解PCF與PCSS核心區別關鍵
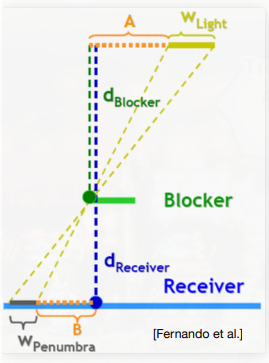
用二維平面的圖去描述,實際上就是光源段 wLight兩端與遮擋物連直線后打在被投影物上的即是 半影段 wPenumbra ,也就是說這段半影需要有漸變的陰影效果,假如我們用 PCF 演算法中的圓盤半徑大小等同于這個半影段的尺寸 wPenumbra,就能實作這段的漸變陰影效果,
現在,由下圖的幾何關系容易推出:
wPenumbra =(dReceiver ?dBlocker )?wLight /dBlocker
其中,wLight 是光源面積尺寸,dBlocker 是遮擋物的深度,dReceiver 是被投影物(實際上就是shading point)的深度,
但是 PCF 演算法的圓盤半徑大小是固定的,因此處處的邊緣看起來都帶有相同的漸變范圍,這和我們看到的筆尖陰影現象不符合(近處邊緣漸變應該更少些,遠處邊緣漸變應該多些),所以我們可以只要根據不同位置動態地修改圓盤半徑大小(實際上就是動態地計算 wPenumbra ),這個也就是PCSS的核心部分,
2.3 分塊研究–演算法核心(如何獲取遮擋物 Blocker Search 步驟)
1.使用固定比例
2.動態比例:我們不能簡單把一個投影點變換成Shadow Map的坐標后,直接拿單個坐標采樣 ShadowMap 的深度來作為 dBlocker ,這是因為投影點的單次采樣實際上就是單一直線連向了光源面的中心,而這條直線要是沒有碰到遮擋物(即 dBlocker=dReceiver ),從而得出該投影點為全亮的結論,
但實際很多場景中(如下圖),投影點和光源面處處連線后會發現有相當一部分光線會碰到遮擋物,因此該投影點應該屬于半影范圍內,
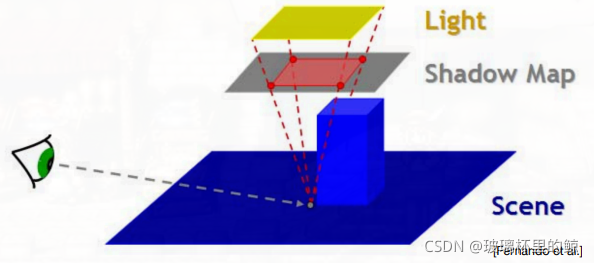
為此,我們可以對 ShadowMap 的一定范圍內進行多重采樣,每次采樣得到的深度若小于 dReceiver 則認為遇到遮擋物并算入平均遮擋深度的貢獻,這樣多重采樣之后得到的平均遮擋深度就作為 dBlocker,
如何確定采樣的范圍半徑呢?兩個引數決定:wLight 的尺寸、投影點與光源的距離
SampleSize = wLight ? zReceiver ? c
這樣,計算 Blocker 平均遮擋深度的整個程序為:
/*
https://www.cnblogs.com/KillerAery/p/15201310.html#percentage-closer-soft-shadows%EF%BC%88pcss%EF%BC%89
*/
float findBlocker( sampler2D shadowMap, vec2 uv, float zReceiver ) {
float dBlocker = zReceiver * 0.01;
const float wLight = 0.006;
const float c = 100.0;
float sampleSize = wLight * zReceiver * c;
float sum = 0.01; // 取0.01一是為了避免出現0除問題,二是當多重采樣沒有貢獻時的dBlocker/sum將等于zReceiver
for(int i = 0;i<BLOCKER_SEARCH_NUM_SAMPLES;++i){
float depthInShadowmap = unpack(texture2D(shadowMap,uv+disk[i]*sampleSize).rgba);
if(depthInShadowmap < zReceiver){
dBlocker += depthInShadowmap;
sum += 1.0;
}
}
return dBlocker/float(sum);
}
2.4 PCSS 演算法程序
Percentage Closer Soft Shadows(PCSS) 的演算法程序:
1.**Blocker Search:**通過多重采樣,計算出平均遮擋深度 dBlocker
2. **Penumbra Size:**計算圓盤半徑大小 wPenumbra = (dReceiver ?dBlocker )?wLight /dBlocker
3. **Filtering:**通過多重采樣,計算出平均 Visibility(實際上就是呼叫PCF演算法)
/*
https://www.cnblogs.com/KillerAery/p/15201310.html#percentage-closer-soft-shadows%EF%BC%88pcss%EF%BC%89
*/
float visibility_PCSS(sampler2D shadowMap, vec4 coords){
poissonDiskSamples(coords.xy);
// STEP 1: avgblocker depth
float dBlocker = findBlocker(shadowMap,coords.xy,coords.z);
// STEP 2: penumbra size
const float wLight = 0.006;
float penumbra = (coords.z-dBlocker)/dBlocker * wLight;
// STEP 3: filtering
const float bias = 0.005;
float sum = 0.0;
for(int i = 0;i<PCF_NUM_SAMPLES;++i){
float depthInShadowmap = unpack(texture2D(shadowMap,coords.xy+disk[i]*penumbra).rgba);
sum += ((depthInShadowmap + bias)< coords.z?0.0:1.0);
}
return sum/float(PCF_NUM_SAMPLES);
}
PCSS 演算法問題:原始性能消耗嚴重危機,
3 針對PCSS與PCF演算法的多重采樣優化:Variance Soft Shadow Mapping(VSSM)
3.1 一句話概括
Variance Soft Shadow Mapping(VSSM) :簡單來說,VSSM 演算法就是依據 ShadowMap 的深度符合正態分布的假設來快速完成 PCSS 中的第一步(Blocker Search)和第三步(PCF演算法)的一種陰影演算法,
3.2 概論(VSSM與PDF與CDF)
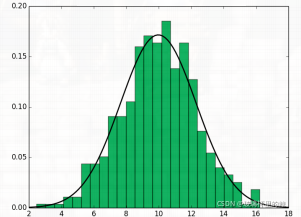
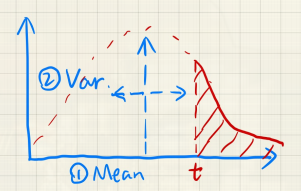
1.為了避免多重采樣的計算,Variance Soft Shadow Mapping(VSSM) 假定一定范圍內的深度的分布符合 正態分布(Normal Distribution)
2.那么只要知道該段范圍的 均值(實際上就是期望值)E 、方差 Var,就能先得到該范圍的正態分布模型(即知道對應的 概率密度函式 PDF),

其中,μ=E,σ2=Var,
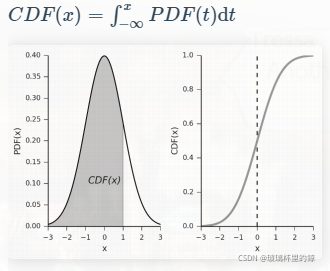
3.接著可以通過該正態分布模型的 累計分布函式(即 CDF),就能快速推算出該范圍內有多少比例的 x 大于(或小于)給定的某個值,

3.3 補充說明
3.3.1計算平均值 & 方差
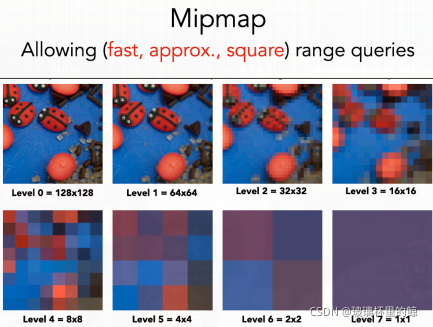
為了快速查詢得到某段范圍的均值、方差,我們可以先選以下一種資料結構來快速查詢 Shadow Map 某段范圍的均值(期望值)E(X) ,
硬體 Mipmap:當 Shadow Map 更新時,需要重新生成 Mipmap,不過GPU硬體實作的 Mipmap 演算法非常快的開銷非常小;查詢某段方形范圍時,需要根據方形中心所在的位置(相對于周圍四個紋素的坐標)、上下層級做三線性插值(Trillinear interpolation),得到的結果即是近似的均值(期望值),
前綴和陣列(Summed Area Tables/SAT):當 Shadow Map 更新時,需要重新進行二維前綴和計算;需要撰寫 Compute Shader 實作該演算法,比Mipmap方法更慢一些,但百分百精準;查詢某段方形范圍時,就可以通過如下圖方法快速查詢得到某段范圍的總和,除掉范圍面積就能得到均值(期望值),

我們需要存盤 E(X)、E(X2)? ,這樣就能計算某段范圍的平均值、方差:
1.平均值 E(X)
2.方差 Var(X)=E(X2)?E2(X)
3.3.2 計算累計分布函式(CDF)
有了上面的期望值與方差,我們就能確定一個正態分布,但是它對應的 CDF 函式是沒有決議解的,而有數值解(稱為 Error Function),但是計算比較繁瑣,
為簡化計算積分的程序,使用了切比雪夫不等式
切比雪夫不等式:.
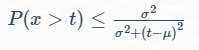
將這個不等式改造一下,就成了一個大膽的近似公式: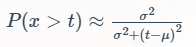
注意:這里求的是 x>t 的部分,即 P(t)=1?CDF(t),
當然這個近似公式肯定不是精確的,但是計算開銷非常小,也就被用在 VSSM 演算法中,
3.3.3 加速 VSSM (Blocker Search )演算法
PCSS 演算法中的 Blocker Search 步驟:在一定范圍內多重采樣,每次采樣得到的深度若小于 dReceiver 則認為遇到遮擋物并算入平均遮擋深度的貢獻,這樣多重采樣之后得到的平均遮擋深度 Zocc 就作為 dBlocker,
如下圖5X5的采樣結果若設 dReceiver 為7,那么平均遮擋深度 zocc 則為紅色部分的平均值,
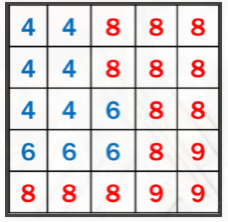
設該采樣范圍的面積為 N,無遮擋的面積占有 N1,有遮擋的面積則占有 N2 ,則有:

我們做出兩個假設:

- 這個假設基于認為深度分布為正態分布,通過切克比夫不等式獲得近似解(即上面兩節的內容),

- 這個假設基于認為絕大部分沒被遮擋的情況都屬于同一個深度(相當于在同一個垂直于光方向的平面),即可認為均為深度 dReceiver,
那么 VSSM 加速該演算法的公式表示為:

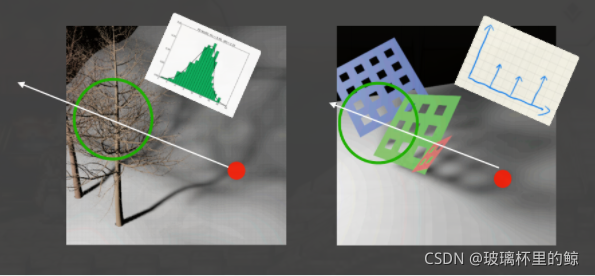
3.3.4 VSSM 的缺陷
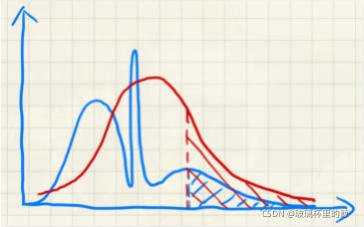
- 并不是任何深度的分布都是符合正態分布模型的,例如對于圖右的簡單幾何體反而用正態分布表示會很不適合,
- 漏光(Light Leaking)現象,在一些應當被陰影完全遮蔽的內部有可能仍產生亮度,

- 在加速 Blocker Search 演算法中的假設 zunocc=dReceiver 基于認為絕大部分沒被遮擋的情況都屬于同一個深度,但實際上有些不被遮擋的地方深度并不等于 dReveiver ,
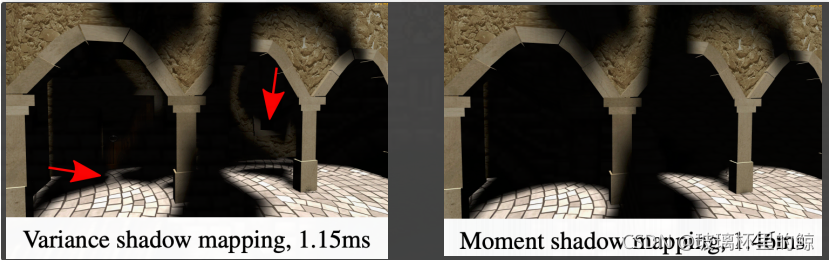
4. 解決VSSM缺陷演算法–Moment Shadow Mapping
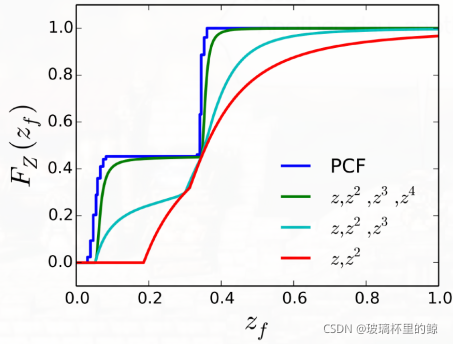
Moment Shadow Mapping 正是為了解決 VSSM 缺陷的一種演算法,它主要想法是:使用高階的矩去描述一個分布的 CDF,這樣就能通過記錄 m 階的矩,就能復原成足夠接近實際 CDF 函式的效果,從而能適應不同的深度分布模型(有些地方可能接近正態分布,有些地方可能奇奇怪怪的分布),
Moment Shadow Mapping將使用最簡單的形式來標識矩:z,z2,z3,z4,…
實際上,VSSM 本質便是記錄 2 階的矩來復原 CDF 函式,而 Moment Shadow Mapping 一般使用4階的矩就已經足夠接近實際 CDF 了,
雖然 Moment Shadow Mapping 效果相當不錯,很好的解決了 VSSM 絕大部分缺陷,但是它仍需要相當的額外空間開銷和重建矩的額外性能開銷,
二. Distance Field Soft Shadows(有向距離場的軟陰影)
鏈接: Inigo Quilez的SDF下的軟陰影.
鏈接: GDC2018分享-基于GPU的光線追蹤.
鏈接: Shadertoy上實作的有向距離場軟陰影.
1. Distance Field Soft Shadows主要想法:
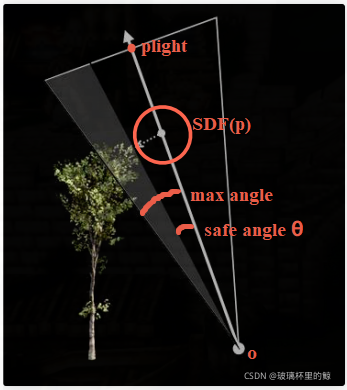
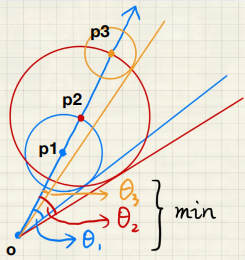
- 將點 o(Shading Point)與光源面中心點 plight 相連形成一條方向為 l 的中心線段,而這條中心線上各個點 pi 都可以通過 SDF 查得與其最近幾何物體的距離并且推算出安全角度(點o 能打到光源面的直線與中心線的最大夾角)為θi,則

- 那么所有這些點中對應的安全角度之中取最小的安全角度 θ=min{θi} ,這個安全角度與最大角度的比例決定了光源面的光照覆寫率,也就決定了點 o 的Visibility(可見性),
2. Distance Field Soft Shadows 演算法程序
具體演算法程序:
-
將 o 點(shading point)設為第一個步進點,即 p0=o
-
每次算出下一個步進點 pi+1=pi+l?SDF(pi) 并記錄安全角度
-
重復 “步驟2”,直到滿足

-
取所有次步進的最小安全角度 θ=min{θi} ,則可見度則為 Visibility = θ/c (其中 c 為點 o 與光源面連接的最大角度)
3. 一步一步慢慢說
3.1 Signed Distance Field(有向距離場)
3.2 Sphere Tracing(跟蹤范圍)
3.3 Distance Field Soft Shadows(有向距離場的軟陰影)的優化
讓我們來看如何基于SDF和ray marching實作軟陰影,假設我們已經有了場景的SDF,通過使用函式float map(vec3 p) 進行查詢,那么map函式中則包括了所有的幾何資訊,通常來說,當要計算某點p的陰影資訊時,我們可以通過朝著light vector 進行raymarch,直到找到一個相交,
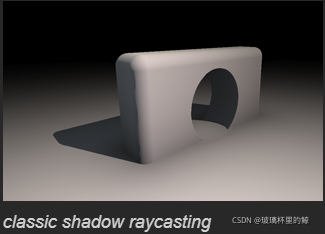
上面的方法只會生成準確的硬陰影,缺乏真實感
優化后:
實際上,計算某個點 pi 的安全角度時,直觀的幾何關系便是:

而在實踐中,往往會使用:
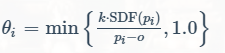
這樣的近似公式實際效果相當接近原幾何關系,而且也能減少復雜的 arcsin 運算開銷,最后它還能通過 k 這個引數來調整陰影的硬軟程度,
如下圖分別為 k=32 、k=8、k=2 的效果:

進一步優化
4. 使用 Distance Field Soft Shadows 的優劣
好處很多:
- 計算陰影很快(假設已經生成了SDF的情況下,比傳統Shadow Mapping類技術是要快的多)
- 陰影質量很高,而且完美解決 Shadow Ance / Peter Panning / 采樣噪聲等傳統Shadow Mapping會出現的問題
那么代價是什么:
- SDF 需要預計算,這就意味著場景物體需要是靜態的,當然也可以使用一些演算法使能和動態物體相結合,盡量減少重新生成SDF的成本,
- SDF 需要較大的存盤空間(一般采用三維陣串列示空間各個網格的SDF值,但是可以使用八叉樹等空間資料結構或者其它方法做進一步優化),
實時陰影系統實作
未完待續,,,,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/342339.html
標籤:其他