1 簡介
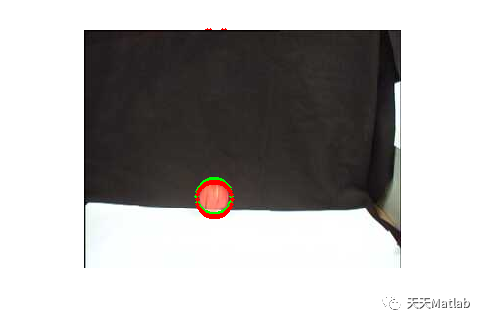
在智能監控系統中,通過幀差法對運動物體的識別,定位,利用卡爾曼濾波演算法對目標運動進行預測,跟蹤,從而控制攝像頭轉動,跟蹤目標物,使目標物體始終出現監控畫面的中心.在此采用卡爾曼濾演算法,進行目標運動的預估,利用Matlab對其仿真.仿真結果顯示跟蹤效果非常好,證明采用該演算法來跟蹤動目標物有效可行,具有一定的研究價值.?
2 部分代碼
clear,clc
% 計算背景影像
Imzero = zeros(240,320,3);
for i = 1:5
Im{i} = double(imread(['DATA/',int2str(i),'.jpg']));
Imzero = Im{i}+Imzero;
end
Imback = Imzero/5;
[MR,MC,Dim] = size(Imback);
% Kalman濾波器初始化
R=[[0.2845,0.0045]',[0.0045,0.0455]'];
H=[[1,0]',[0,1]',[0,0]',[0,0]'];
Q=0.01*eye(4);
P = 100*eye(4);
dt=1;
A=[[1,0,0,0]',[0,1,0,0]',[dt,0,1,0]',[0,dt,0,1]'];
g = 6;
Bu = [0,0,0,g]';
kfinit=0;
x=zeros(100,4);
% 回圈遍歷所有影像
for i = 1 : 60
% 匯入影像
Im = (imread(['DATA/',int2str(i), '.jpg']));
imshow(Im)
imshow(Im)
Imwork = double(Im);
%提取球的質心坐標及半徑
end
pause(0.3)
end
% 畫出球橫縱坐標的位置
figure
plot(cc,'r*')
hold on
plot(cr,'g*')
%噪聲估計
posn = [cc(55:60)',cr(55:60)'];
mp = mean(posn);
diffp = posn - ones(6,1)*mp;
Rnew = (diffp'*diffp)/5;
3 仿真結果

4 參考文獻
[1]張長春, 黃英, & 楊剛. (2009). 卡爾曼濾波在跟蹤運動目標中的應用及仿真. 現代電子技術(20), 54-56.

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/347227.html
標籤:其他