在上一章的雙目立體視覺中,計算視差時,我們首先給定了兩個像點![]() 、
、![]() ,顯然,這兩點是物方P點在左右像方上的對應的兩個像點,要完成對P點的精確定位,就需要計算P點在左右像方上的視差,而確定視差之前,首先要尋找P點在左右像方上的對應的像點,尋找左右像方對應像點的程序,就是接下來要講的立體匹配,立體匹配(Stereo Matching)就是從不同視角拍攝的影像中找到匹配的對應點,這個對應點一般稱為同名像點,也可以簡稱為同名點,
,顯然,這兩點是物方P點在左右像方上的對應的兩個像點,要完成對P點的精確定位,就需要計算P點在左右像方上的視差,而確定視差之前,首先要尋找P點在左右像方上的對應的像點,尋找左右像方對應像點的程序,就是接下來要講的立體匹配,立體匹配(Stereo Matching)就是從不同視角拍攝的影像中找到匹配的對應點,這個對應點一般稱為同名像點,也可以簡稱為同名點,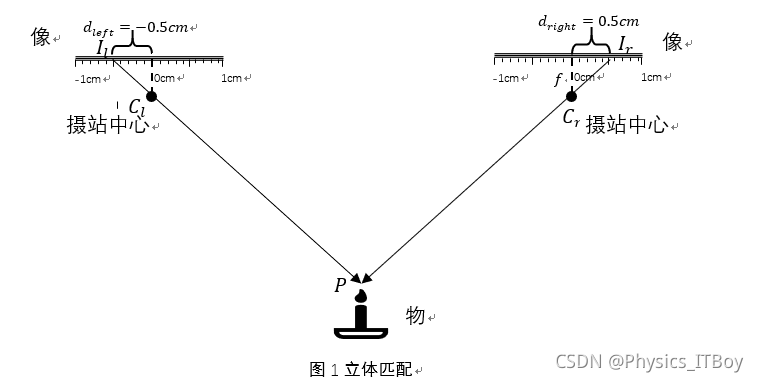
為了方便,我們將不在使用人眼或者更寬泛的雙目立體視覺場景作為例子,而是具體而明確的只以相機拍攝影像這個場景來闡釋立體匹配和后續更多的計算機視覺相關的演算法和概念,因此,像方將默認為相機拍攝的影像,物方則是相機拍攝的三維空間場景,
如果只是想要尋找某個物方點在像方上的像點,很簡單對不對,只要翻閱一下這兩張影像人眼就可以找出來,但如果拍攝這個場景不只是兩張影像,而是10張、100張、1000張,查找同名點是不是一個很繁雜的作業呢?而在具體應用中,往往需要把場景里所有關鍵的物方位置都精確定位出來,此時需要定位的物方點成千上萬,甚至達到千萬,這時尋找同名點的作業量將會是一個天文數字,幸運的是,結合計算機技術的立體匹配演算法,可以很好的解決這個問題,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/351172.html
標籤:其他