文章目錄
- 一 硬體準備
- 二 驅動準備
- 首先安裝依賴:
- 檢驗是否正確安裝
- 啟動雷達并檢查資料
- 三 ROS作業環境搭建
- 3.1 安裝socket can依賴
- 3.2 安裝ars_40X開發包
- 四 測驗
- 五 總結
毫米波雷達在惡劣環境的魯棒性要遠強于激光雷達,同時還能夠回傳物體的相對速度等資訊,同時其價格較低,具有相當高的性價比,實驗室目前需要在一些惡劣環境下進行雷達輔助相機檢測,實作多模態的融合,第一步,就是需要進行相機和雷達的聯合標定作業,因此首先需要對雷達在ubuntu下進行可視化與介面開發,近一周來完成了雷達的相關作業,將作業總結如下:
一 硬體準備
- 毫米波雷達:本文選用大陸ARS408雷達,其性能引數如下:
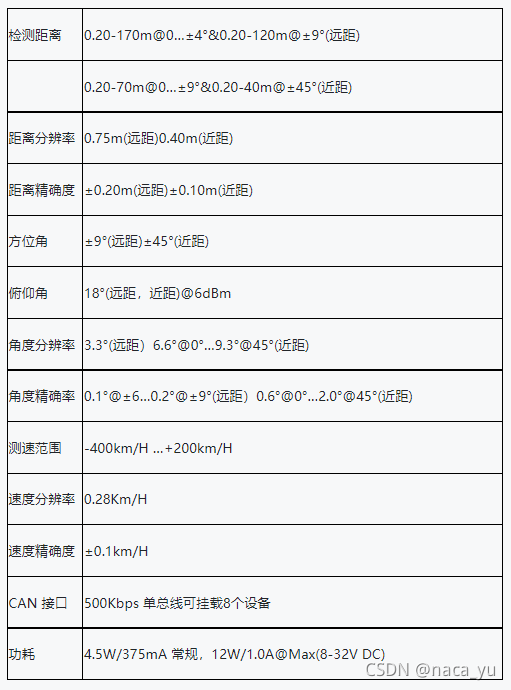
| 圖1.大陸雷達引數表 |
|---|

| 圖2.大陸毫米波雷達 |
|---|
總結來說,ARS404-21 是大陸 40X 毫米波雷達傳感器系列中入門產品,可以適用于不同的應用場景,具有低成本,堅固耐用 高性能和操作可靠安全性高等特征,測驗距離到達170米,
二 驅動準備
| 名稱 | 版本 |
|---|---|
| ROS版本 | ROS Melodic |
| 驅動器版本 | peak-linux-driver-8.12.0 |
| ubuntu系統 | ubuntu 18.04 |
大陸雷達支持CAN通信,我們電腦是無法直接進行CAN的通信的,因此就需要借助CAN轉USB的驅動器,讀取雷達的點云資料,
經過篩選,我們使用了毫米波雷達官方推薦的peak-driver驅動器進行資料的轉換(peak-driver的驅動程式下載),下面進行安裝,注意,要選擇自己需要的版本號,這里使用peak-linux-driver-8.12.0版本,建議跟著我的來,
首先安裝依賴:
$ sudo apt-get install flex
$ sudo apt-get install libpopt-dev
$ sudo apt-get install can-utils
#然后將剛才下載好的驅動程式解壓
$ tar -zxvf peak-linux-driver-8.1.tar.gz
$ cd peak-linux-driver-8.1
$ make clean
$ make net=NO_NETDEV_SUPPORT
$ sudo make install
檢驗是否正確安裝
$ sudo modprobe pcan
$ cat /proc/pcan

結果應該是這樣的,那就對了,
啟動雷達并檢查資料
$ sudo ifconifg can0 up #啟動雷達can0介面,此時回車后,驅動器開始啟動并接受資訊
$ candump can0 #顯示接受的雷達資訊
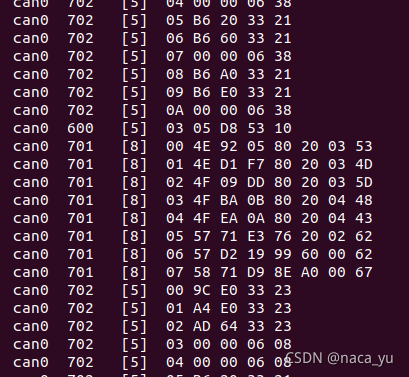
經過以上步驟,驗證完成,說明安裝成功,準備下一步軟體環境搭建作業,
三 ROS作業環境搭建
經過以上步驟,下面需要對資料進行抽象化,也就是利用ROS的RVIZ進行資料的顯示,以確定到底雷達資訊的可視化資訊確定雷達是否滿足我的要求,包括最遠距離、角度解析度等引數,
3.1 安裝socket can依賴
github鏈接
$ git clone https://github.com/Project-MANAS/socket_can.git
$ cd socket_can
$ mkdir build
$ cmake ..
$ sudo make install #安裝成功
3.2 安裝ars_40X開發包
github鏈接
- 創建ROS作業環境
創建當前的作業空間
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ git clone https://github.com/Project-MANAS/ars_40X.git
$ cd ..
$ catkin_make
由此,完成對ars_40X的編譯,可以啟動ros的功能包進行可視化作業,
2. 啟動可視化功能包
#進入到catkin_ws作業空間
$ source ./devel/setup.bash #更新ROS的作業空間集合
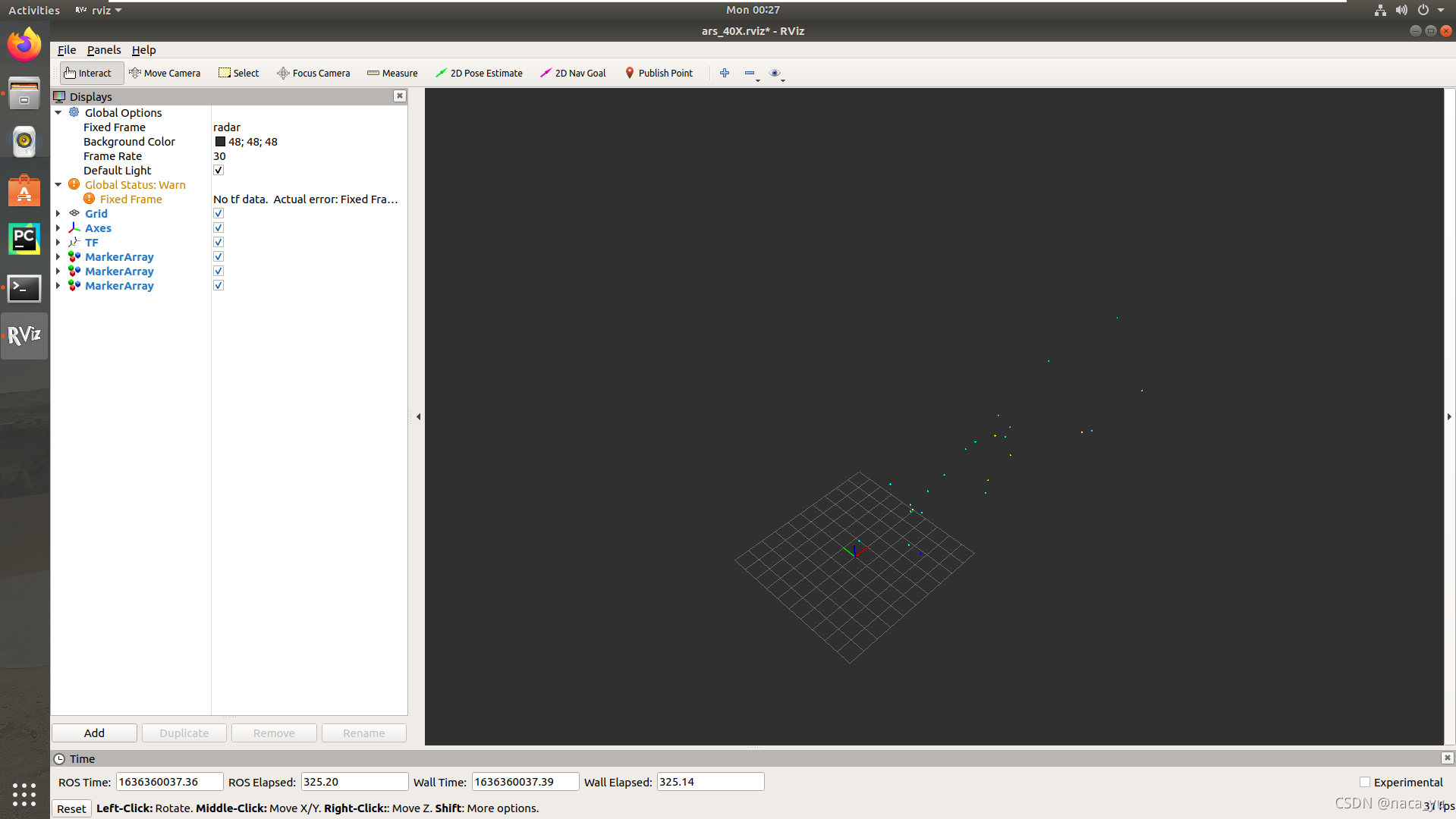
$ roslaunch ars_40X ars_40X.launch visualize:=true obstacle_array:=true
四 測驗
<iframe id="ly5fRekD-1636361125679" src="https://player.bilibili.com/player.html?aid=764034598" allowfullscreen="true" data-mediaembed="bilibili"></iframe>
毫米波雷達點云可視化
可以看到,點云資料清晰地顯示在界面中,
五 總結
- 首先,在最后一步的安裝程序中,遇到了一些問題,但是都通過google解決了,主要是缺少costmap_converter的問題,可以網上搜索安裝一下,
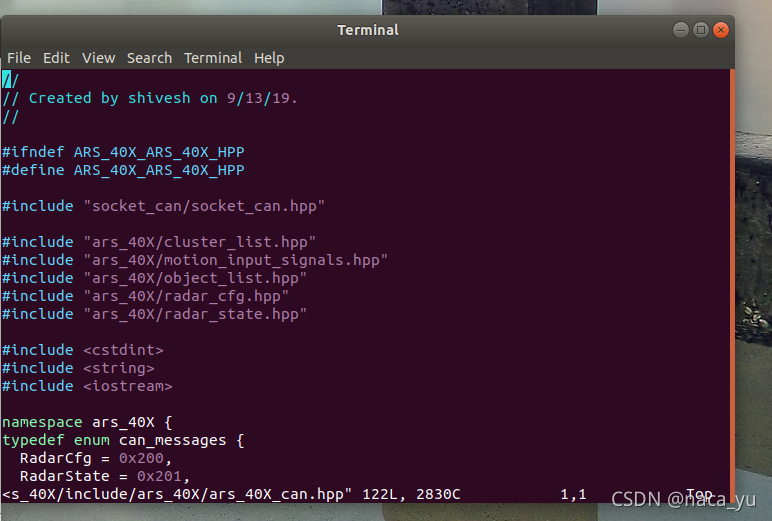
- 其次,最后的catkin_make程序中,出現了socket_can.hpp找不到的問題,通過將原始碼中庫的參考<>改成“”可以解決包找不到的問題,如下圖 #include “socket_can/socket_can.hpp”,
https://zhuanlan.zhihu.com/p/406235662
https://www.peak-system.com/PCAN-USB.199.0.html?L=1
https://blog.csdn.net/ost_csdn/article/details/104962144
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/353255.html
標籤:AI