1 簡介
隨著全球經濟的快速發展,居民的車輛擁有率也在不斷攀升,伴隨而來的就是日益嚴重的交通問題,為了級訓交通運輸壓力,世界各國都加強了對智能交通系統的研究和建設,交通運輸未來的發展趨向于智能化,作為一種新興產業,智能交通已為我國經濟不斷發展注入了新的動力,車道偏離預警系統作為 ITS其中的一部分,在車輛偏離車道行駛時,通過發出警告提醒駕駛人員進而避免危險發生,而構成交通環境的基礎因素就是車道線,因此車道線的檢測尤為重要,本文主要基于 Hough(霍夫)變換原理,以交通視頻檢測影像為研究物件,對車道檢測的關鍵技術進行了研究,Hough變換作為一種常用的從影像中識別出幾何圖形的方法,其具有較好魯棒性,可以在噪聲環境比較大的情況下識別出車道直線, 首先,本文大概介紹了智能交通系統及車道預警系統的應用需求,國內外對其的研究及應用現狀,針對影像的預處理問題,本文對影像灰度化、灰度的線性變換、影像增強及邊緣檢測進行了分析與實作,以采集到的車道影像作為實驗物件,通過對比實際效果確定了車道預處理的具體流程與方法,通過分析幾種交通檢測方法及常用車道檢測方法,并對 Hough變換進行了測驗,通過比較實際效果,充分說明了 Hough變換在車道檢測方面的優越性,最終確定將 Hough變換作為主要演算法,然后以交通監測視頻中提取的背景影像為研究物件,針對車道劃分對車道背景主要進行了以下處理:首先將背景車道進行灰度處理,將彩色圖片轉換為灰度圖;其次是將處理后的灰度圖進行灰度線性變化和二值化處理,目的是去除車道邊緣附近的噪聲白點;將生成的二值圖進行中值濾波和Roberts邊緣檢測,然后進行Hough變換擬合出車道線?
2 部分代碼
function colorAndTypeIdx = videodetectcolorandtype(twoLines_0b, YCbCr)
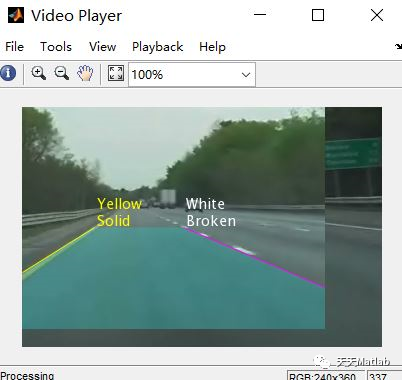
% VIDEODETECTCOLORANDTYPE - Detects if the lane detected is Yellow/White
% and Solid/Broken in videoldws demo.
% Copyright 2008-2009 The MathWorks, Inc.
% twoLines_0b = coordinate points of lines (0 based)
%
% Here, for a line with start point (r1,c1) and end point (r2,c2),
% we form a ROI with points:
% (r1,c1-HALF_OFFSET) (r1,c1+HALF_OFFSET)
% (r2,c2-HALF_OFFSET) (r2,c2+HALF_OFFSET)
% We search for yellow/white color within this ROI
INVALID_COLOR = int8(0);
WHITE_COLOR = int8(1);
YELLOW_COLOR = int8(2);
INVALID_MARKING = int8(0);
BROKEN_MARKING = int8(1);
SOLID_MARKING = int8(2);
INVALID_COLOR_OR_TYPE = int8(1);% color=yellow/white; type=broken or solid
YELLOW_BROKEN = int8(2);
YELLOW_SOLID = int8(3);
WHITE_BROKEN = int8(4);
WHITE_SOLID = int8(5);
lineColorIdx = int8([0 0]);
solidBrokenIdx = int8([0 0]);
colorAndTypeIdx = int8([0 0]);
HALF_OFFSET = int32(10);
zeroI32 = int32(0);
oneI32 = int32(1);
twoI32 = int32(2);
rH = int32(size(YCbCr(:,:,1),1));
cW = int32(size(YCbCr(:,:,1),2));
tmpInImage_Y = YCbCr(:,:,1);
tmpInImage_Cb = YCbCr(:,:,2);
leftC = int32(zeros(rH,1));
rightC = int32(zeros(rH,1));
Rs = int32(zeros(rH,1));
twoLines_1b = twoLines_0b([2 1 4 3], :);
for i=oneI32:int32(length(twoLines_1b(:)))
twoLines_1b(i) = twoLines_1b(i) + oneI32;
end
for lineIdx =oneI32:twoI32%1:2
%% one line
r1c1r2c2 = twoLines_1b(:,lineIdx) - 1;
r1 = r1c1r2c2(1);
c1 = r1c1r2c2(2);
r2 = r1c1r2c2(3);
c2 = r1c1r2c2(4);
% make sure r1 is the min (r1,r2)
if r1>r2
tmp=r2;
r2=r1;
r1=tmp;
tmp=c2;
c2=c1;
c1=tmp;
end
pointNotLine = (r1==r2) && (c1==c2);
% find if line is within image: (r1,c1) and (r2,c2) must be within image
if ((r1>zeroI32 && r1 <= rH) && (c1>zeroI32 && c1 <= cW) && ...
(r2>zeroI32 && r2 <= rH) && (c2>zeroI32 && c2 <= cW)) && ~pointNotLine
line_within_image = logical(true);
else
line_within_image = logical(false);
end
if (line_within_image)
len = r2-r1+oneI32;
i=oneI32;
% Rs(1:len)=r1:r2
for p=r1:r2
Rs(i) = p;
i=i+oneI32;
end
%leftC(1:len) = int32(linspace(c1-HALF_OFFSET, c2-HALF_OFFSET, len));
%y = linspace(d1, d2, n)
%y = [d1+(0:n-2)*(d2-d1)/(floor(n)-1) d2];
quotient = (single(c2-c1))/(single(len)-single(1) + single(eps));%(d2-d1)/(floor(n)-1)
for i=oneI32:len
leftC(i) = (c1-HALF_OFFSET) + int32((single(i)-single(1))*quotient);
rightC(i) = leftC(i)+ twoI32*HALF_OFFSET;
if leftC(i) < oneI32
leftC(i) = oneI32;
if rightC(i) < oneI32
rightC(i) = oneI32;
end
end
if rightC(i) > cW
rightC(i) = cW;
end
end
whiteCount = zeroI32;
yellowCount = zeroI32;
grayCount = zeroI32;
SumOfGotAlLeastOneWhitePixelInTheRow = zeroI32;
SumOfGotAlLeastOneYellowPixelInTheRow = zeroI32;
for i=oneI32:len
gotAlLeastOneWhitePixelInTheRow = logical(false);
gotAlLeastOneYellowPixelInTheRow = logical(false);
for cv = leftC(i):rightC(i)
if tmpInImage_Y(Rs(i), cv) >= single(175/255)
whiteCount = whiteCount+oneI32;
gotAlLeastOneWhitePixelInTheRow = logical(true);
elseif tmpInImage_Cb(Rs(i), cv) >= single(90/255) && tmpInImage_Cb(Rs(i), cv) <= single(127/255)
yellowCount = yellowCount+oneI32;
gotAlLeastOneYellowPixelInTheRow = logical(true);
else
grayCount = grayCount+oneI32;
end
end
if gotAlLeastOneWhitePixelInTheRow
SumOfGotAlLeastOneWhitePixelInTheRow = SumOfGotAlLeastOneWhitePixelInTheRow+oneI32;
end
if gotAlLeastOneYellowPixelInTheRow
SumOfGotAlLeastOneYellowPixelInTheRow = SumOfGotAlLeastOneYellowPixelInTheRow+oneI32;
end
end
yellowVsTotal = single(yellowCount)/single(grayCount+yellowCount+whiteCount);
whiteVsTotal = single(whiteCount)/single(grayCount+yellowCount+whiteCount);
if yellowVsTotal > whiteVsTotal
lineColorIdx(lineIdx) = YELLOW_COLOR;
linearPixelRatio = single(SumOfGotAlLeastOneYellowPixelInTheRow)/single(len);
else
lineColorIdx(lineIdx) = WHITE_COLOR;
linearPixelRatio = single(SumOfGotAlLeastOneWhitePixelInTheRow)/single(len);
end
%% distinguish solid and broken lane markers
% if we use yellowVsTotal(==whiteVsTotal) to find marker type (solid/broken)
% it would not give accurate result; because in the patch we are searching
% for yellow/white pixel- we do not know what's the pecentage of gray pixels
% are there
% that's why we are considering a different method; here we try to find one
% yellow (==white) pixel in one row; once we find a yellow (==white) pixel
% in the row we don't need to find anything in that row of the patch (ROI)
if linearPixelRatio > single(0.8)
solidBrokenIdx(lineIdx) = SOLID_MARKING;
else
solidBrokenIdx(lineIdx) = BROKEN_MARKING;
end
if (lineColorIdx(lineIdx) == YELLOW_COLOR) && (solidBrokenIdx(lineIdx) == BROKEN_MARKING)
colorAndTypeIdx(lineIdx) = YELLOW_BROKEN;
elseif (lineColorIdx(lineIdx) == YELLOW_COLOR) && (solidBrokenIdx(lineIdx) == SOLID_MARKING)
colorAndTypeIdx(lineIdx) = YELLOW_SOLID;
elseif (lineColorIdx(lineIdx) == WHITE_COLOR) && (solidBrokenIdx(lineIdx) == BROKEN_MARKING)
colorAndTypeIdx(lineIdx) = WHITE_BROKEN;
elseif (lineColorIdx(lineIdx) == WHITE_COLOR) && (solidBrokenIdx(lineIdx) == SOLID_MARKING)
colorAndTypeIdx(lineIdx) = WHITE_SOLID;
end
else
lineColorIdx(lineIdx) = INVALID_COLOR;
solidBrokenIdx(lineIdx) = INVALID_MARKING;
colorAndTypeIdx(lineIdx) = INVALID_COLOR_OR_TYPE;
end
end
3 仿真結果
4 參考文獻
[1]王詩旋, 賀新升, 張榮輝,等. 基于Matlab和優化Hough變換的高速公路車道線檢測方法[J]. 2021(2011-8):29-29.

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/354794.html
標籤:其他