目錄
1. 前言
2. 問題背景
2.1 相關研究回顧
2.2 負荷特征回顧
3. Proposed Methodology
3.1 Framework
3.2 Window with margin method
3.3 Adaptive Window to capture
3.4 Multi-timecale window screening
3.5 Threshold Updating
3.6 Load signatures and Sequential LS Tree
4. 小結
1. 前言
本文是對以下論文的解讀筆記,注意在下文中“該論文/本論文”和“本文”是指向不同的物件,
arXiv2107.11287: Adaptive event detection for Representative Load Signature Extraction, Lei Yan, Wei Tian, Jiayu Han, Zuyi Li
作者是來自于Illinois Institute of Technology的華人教授李祖毅團隊,
論文標題中雖然包含Load Signature Extraction,但是本論文側重點是在事件檢測上,只不過事件檢測是為符合特征提取服務的,以下也僅介紹本論文中關于事件檢測演算法的部分,
2. 問題背景
NILM基本策略分為兩大類:event-based strategy, non-event-based strategy.
后者基本上是基于穩態特征來進行負荷分解,像NILMTK的示例中給出的CO和FHMM等演算法就屬于這一類,主要用于只有低采樣率資料的條件下,但是暫態特征包含了比穩態特征更具分辨能力的特征,而要提取暫態特征就需要采用event-based策略,這也代表了當前NILM研究的主流,事件檢測和暫態特征提取需要高采樣率的資料,
自然而然地,事件檢測就是event-based NILM的第一步,事件主要指的就是電器投切,當然也有一些有多個作業狀態的電器,這些電器在作業狀態之間的切換(speed adjustment, mode change etc. 比如說空調在制熱模式與送風模式之間的切換,吹風機的不同轉速的切換,等)也是典型事件,
單個的電器的投切或狀態轉移的事件比較容易處理,但是,實際的家庭負荷環境非常復雜,主要的挑戰來自于Concentrated use(e.g., in the morning and evening,早晚高峰時期的集中使用)以及High diversity(電器種類多樣),具體用電狀況包括但不限于以下一些特征:
- High fluctuation,穩態的功率波動(standard deviation)非常大
- Long transition,存在一些過渡時間很長的情況,特別是當負荷超出了額定負載的條件下(比如說洗衣機中衣物重量超過了它的標稱容量),電器的投切過渡時間會變得很長
- Near Simultaneity,多種電器同時或者接近同時發生狀態轉移,導致多個事件發生的間隔非常小,因此難以區分
這種多變復雜的用電環境條件使得不具備自適應能力的演算法模型難以處理,
本論文提出了一種動態調整包括時間視窗、檢測門限等引數的演算法來對應上述的復雜多變的用電環境條件下的事件檢測問題,
2.1 相關研究回顧
論文回顧了一下一些相關的研究(具體內容這里就不一一介紹了,畢竟它們只是用來做反派的^-^):
Transient-passing step-change method
Rule-based approach
Window with margin method: 本論文的演算法受此啟發
Statistical methods for change-point detection:
GLR: Generalized likelihood ratio
LLD-Max: log-likelihood ratio detector with maxima
CUSUM
Matched Filter method
Cepstrum analysis method
Hybrid method combining two auxiliary algorithms to handle false alarm caused by long transition and high fluctuation: 這篇是本論文作者團隊之前的論文
以上這些方法的缺點或局限性體現在:缺乏無監督學習能力、缺乏引數自適應調節能力、不能處理近同時(near simultaneous)事件,沒有兼顧load-signature提取,等,下表是一個總結,這也就是本論文的演算法所需要解決的問題,
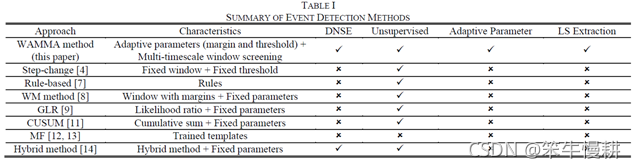
DNSE: dealing of near simultaneous event, 近同時事件的處理
2.2 負荷特征回顧
與影像和人類語音相同,電器設備有各自獨特的負荷特征(load signature),體現在電壓、電流、有功功率、and/or無功功率等的時序列波形上,負荷特征可以分為穩態特征和暫態特征兩大類,另外,時間戳也能夠提供一些關于比如用戶使用習慣方面的輔助資訊,如下圖所示為廣泛被各種文獻采用的負荷特征的一部分(絕大部分?),
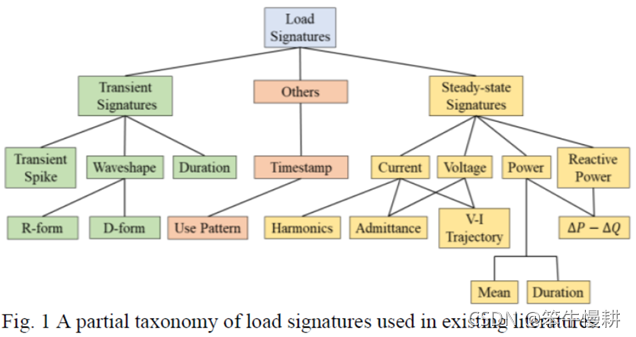
穩態特征的優點在于持續性(persistence)、穩定性(stability)、可加性(additivity),有很多文獻研究了基于穩態特征的負荷分解方法,但是穩態特征存在的一個問題是有些不同的電器可能擁有相近的穩態特征,而暫態特征就具有更強分辨能力(transients are more different and provide more deciding information than steady-state signatures),暫態特征可以分為rectified form(R-form)和delta form(D-form)兩大類,差異在于是否存在很大的過沖(whether the transient spike power goes far beyond the steady-state power).
要利用暫態特征就必須能精確地檢測出暫態事件發生的時刻,這就是事件檢測的必要性,進一步,要確定精確的暫態事件時刻,就需要高頻采樣資料,
3. Proposed Methodology
本文所提的演算法名為WAMMA,全稱Window with Adaptive Margin, Multi-timescale window screening and Adaptive threshold.其主要特征如下:
- Window with margin method: 這個方法是來自于[F.Linda1999],估計主檢測窗前后的副檢測窗的信號均值以便于進行自適應的檢測門限調整,由此來解決high fluctuation所帶來的問題,
- 檢測視窗的前后margin自適應地調整,以此解決long transition問題
- 兩種尺度的視窗掃描(macro/micro-timescale window screening),以此對付常規的檢測視窗所無法對付的近near simultaneous事件問題
此外,本演算法不僅僅檢測變化點(changepoint),還能夠給出關于完整的過渡態的資訊,以便于后續基于過渡態的load-signature分析和提取,
3.1 Framework
如下圖所示本演算法應用的系統框架示意圖,
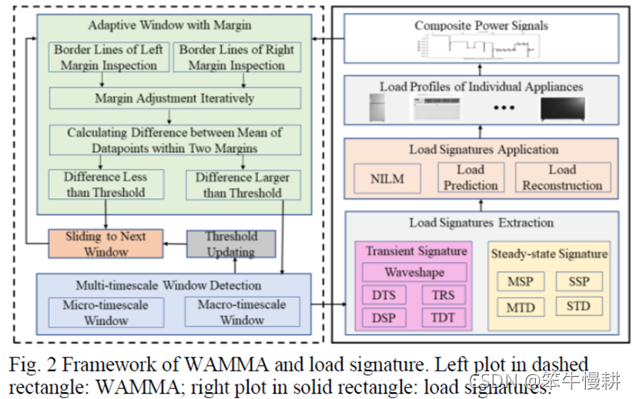
左半部分為本文所提議的WAMMA演算法,右下為負荷特征提取部分,它利用WAMMA所提供的檢測結果為輸入,右上為應用部分,包括但不限于基于負荷特征的負荷分解以及基于負荷分解資訊的應用,上部中央的左向箭頭應該是指可以基于各電器設備的負荷資訊合成出復合負荷功率(composite power signals)信號并用于相關研究和演算法優化(?)
前戲了這么久,終于突入本文最核心的要點^-^
3.2 Window with margin method
這個方法不是本論文原創,最早是由[F.Linda1999]提出的,對主檢測窗前后兩個副檢測窗的信號進行均值估計以便于進行自適應的檢測門限調整,由此來解決high fluctuation所帶來的問題,如果有小伙伴讀過我之前的兩篇論文筆記的話,應該能夠想起來,這與那兩篇關于雙邊CUSUM演算法的論文中的平均視窗的概念是一脈相承的,但是在那兩篇論文中只有主檢測視窗前面的副視窗,這里是前后兩個副視窗!

檢測變數如下所示:
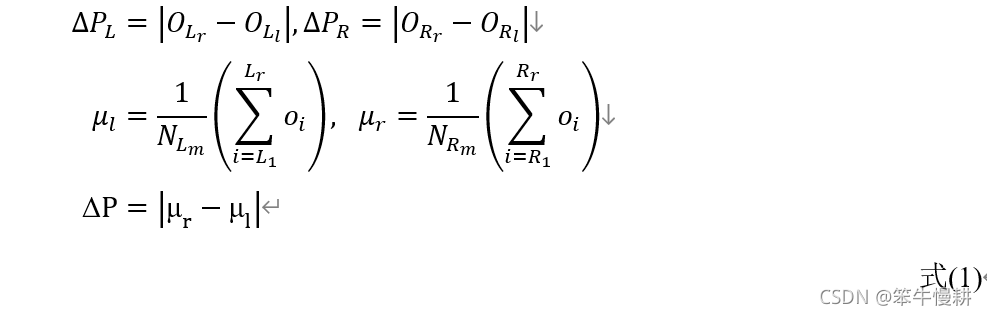
其中,![]() 表示觀測資料,
表示觀測資料,![]() 、
、![]() 分別代表左、右觀測窗左右邊界的樣本值之差,
分別代表左、右觀測窗左右邊界的樣本值之差,![]() 分別代表左右觀測窗的樣本均值,
分別代表左右觀測窗的樣本均值,![]() 代表左右觀測窗的樣本均值之差,
代表左右觀測窗的樣本均值之差,
作為一個基本的判斷準則,當![]() 超過預設門限
超過預設門限![]() 時,即可以認為一個事件發生了,
時,即可以認為一個事件發生了,
為什么這么說呢?如上圖所示,中間的主觀測窗對應的是事件發生的過渡態(暫態),而左右觀測窗則分別對應著事件發生前后的穩態區間,左右兩觀測窗的穩態均值有顯著的差異的時候,意味著功率發生了顯著的變化,即某個或者某些電器發生投切事件或者作業狀態轉移的事件,當然,上圖所示是一個概念展示用的比較理想的事件發生程序,左中右三個觀測窗的窗寬、判斷門限等是需要確定的引數,最重要的是如何確定左右觀測窗是對應著穩態而中間又恰好對應暫態呢?欲知詳細如何,且聽下節分解,
3.3 Adaptive Window to capture
如上一節所述,如何確保左中右三個視窗分別恰好對應著事件前的穩態、事件發生暫態和事件發生后的穩態呢?由于不同的電器設備、不同的作業狀態之間的轉移的暫態時長可能差異很大,采用固定的窗寬顯然無法統一地對應短暫態事件和長暫態事件,太窄的觀測窗可能會將長暫態事件識別為多個事件,而太長的觀測窗則會降低對暫態事件發生時刻判斷的精確度,精確地判斷出整個暫態區間對于后續的load-signature的識別很重要,
如下圖所示為采用固定觀測窗寬時可能出現的一些場景及其問題示例,
在圖(a)中,暫態變化沿出現在左觀測窗的右邊界,在圖(b)中,暫態變化沿出現在右觀測窗的左邊界,在圖(c)和(d)中,暫態變化的兩個沿分別出現左或右觀測窗的兩個邊界處理,
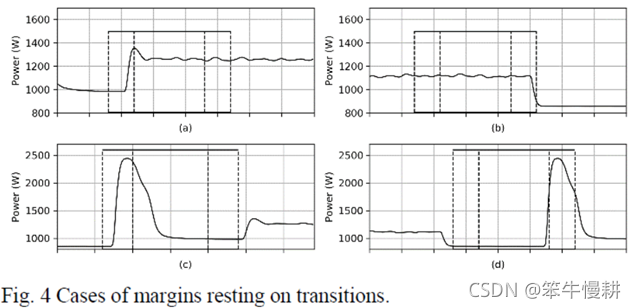
“Window with margin method”的要點在于使得左、右觀測窗都出現在穩態區間,這意味著滿足以下條件:

上圖所示的幾種情況都不滿足這一條件,因而會導致誤判,
本論文給出了一種適應性地調整窗寬及其位置的機制來解決這一問題,下圖所示為一種調節情況的示例:
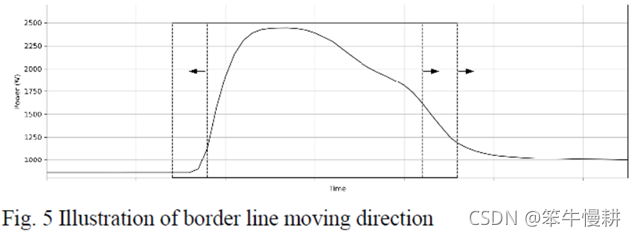
假設,在上次視窗檢測結束后檢測視窗移動到了當前位置,其中左觀測窗的左邊界![]() 對應上次檢測的右觀測窗的右邊界
對應上次檢測的右觀測窗的右邊界![]() ,這是一個很自然的選擇,這里不考慮前后兩次檢測的視窗overlap,
,這是一個很自然的選擇,這里不考慮前后兩次檢測的視窗overlap,
如上圖所示,此時,左觀測視窗的有邊界![]() 處于狀態轉移區,因此不滿足
處于狀態轉移區,因此不滿足![]() 的條件,所以,應該將
的條件,所以,應該將![]() 向左移動,直到可以認為整個左觀測窗都處于穩態區,
向左移動,直到可以認為整個左觀測窗都處于穩態區,
同樣,![]() 和
和![]() 則需要相應地右移直到它們都處于穩態區,
則需要相應地右移直到它們都處于穩態區,
當然,僅僅靠![]() 以及
以及![]() 還無法確保對應視窗處于穩態區,比如說,在上面Fig4-(d)中,雖然這兩個條件得到了滿足,但是很顯然右觀測窗恰好處于暫態區,這將暫態區發生時刻及對應區間的誤判,所以上述兩個條件只是必要條件而非充分條件,
還無法確保對應視窗處于穩態區,比如說,在上面Fig4-(d)中,雖然這兩個條件得到了滿足,但是很顯然右觀測窗恰好處于暫態區,這將暫態區發生時刻及對應區間的誤判,所以上述兩個條件只是必要條件而非充分條件,
本文提出一種修改的CUSUM演算法來檢測是否真的有事件發生,將觀測樣點的一階差分用于計算累計和(cumulative summation)以及變化趨勢的判斷,如下所述:
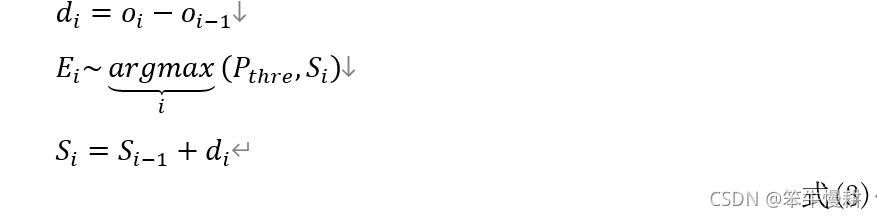
如上式所示,當累計和![]() 超過門限
超過門限![]() 即認為有事件發生,將
即認為有事件發生,將![]() 置1表示在時刻i發生事件,否則
置1表示在時刻i發生事件,否則![]() 置0.
置0.
變化趨勢排除了high-fluctuation被誤判為事件的可能性,high-fluctuation可能會導致大的累計和,但是連續振蕩會導致波形趨勢的頻繁轉向,在這種情況下,資料樣本的一階差分的符號![]() 將出現(+1)和(-1)交替,這一資訊可以用來濾除由high-fluctuation導致的虛警,
將出現(+1)和(-1)交替,這一資訊可以用來濾除由high-fluctuation導致的虛警,
此外,部分過渡區間可能變化緩慢以至于單靠門限判決難以判斷是否應該移動觀測窗邊界,變化趨勢資訊將給視窗邊界移動提供輔助資訊,在本論文中,如果負向變化符號在整個觀測區間占60%以上,即便變化值本身小于門限,也會將右邊界向右移動,直到變化符號和變化值兩方面都滿足條件,
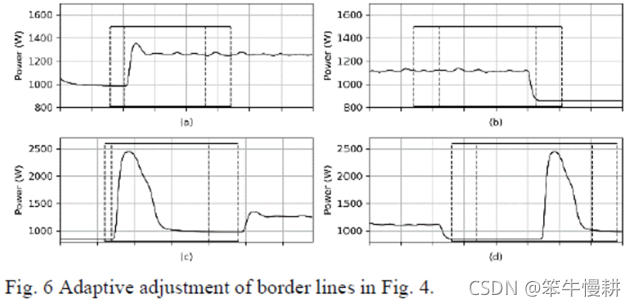
基于以上所述的調節機制,Fig4中的各種情況將會通過觀測窗邊界調整變為下圖的情況:
3.4 Multi-timecale window screening
如上所述,觀測窗邊界調整確保了左右觀測窗都被調整到了穩態區間,但是,很有可能一段穩定區間很可能出現在一個長暫態區間的鞍部(saddle),或者,多個電器設備同時在發生狀態轉換,如下圖所示:
本文提出了結合macro-timescale window screening(宏尺度窗掃描)和micro-timescale window screening(微尺度窗掃描)來出了這種由近同時事件或長暫態帶來的問題,
宏尺度窗掃描包括兩部分,
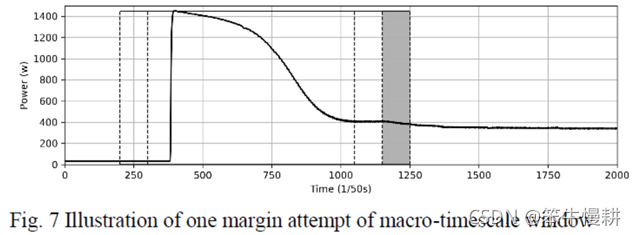
第一部分是在當前視窗位置的基礎上再做一個margin探索檢查變化趨勢,如Fig7所示,這個暫態區間長度超過20秒,遠遠超過預設設定的2秒窗寬,假定在經過調整以后,右窗調整到了大概1050~1150區間,此時再對如陰影部分所示的區間做一次視窗測驗會發現其中一階差分的符號為負的比率超過60%,據此將做出右觀測窗還需要繼續右移的判斷,
第二部分是,,,The second one is concatenation of near-simultaneous events. If the first event is classified to some appliance in a low probability in the following appliance identification step, it is very likely that two events are from the same long transition. In this case, the concatenated event will be inferred again to find out which appliance is changing state. The second component works well in conjunction with load disaggregation in a later stage. As this paper is mainly about event detection, it is not considered in the case study. [chenxy]老實講,這一段沒太明白作者在說啥,不過由于這一部分需要與后面負荷分解聯合起來考慮,而且作者也沒有在這篇論文中討論其中細節,這里我也就順坡下驢懶得轉譯了^-^.
微尺度窗掃描的目的在于利用變化和range(?)鑒別出發生時間相距很近的事件,在宏尺度窗掃描結束后,采用與左觀測量寬度相同的觀測窗(正常的中央觀測窗寬度應該遠遠大于左右觀測窗?)對當前中央觀測窗從左到右進行掃描以檢測疑似事件,如果存在疑似事件的話,NILM系統將會在后續的負荷分解環節基于各種電器的負荷特征去推斷是否存在兩個靠得很近的事件,當然,這(微尺度窗掃描)僅限于在兩種情況下發揮作用,一種是存在high-fluctuation的情況,high-fluctuation很容易導致精細尺度上的判斷出現虛警,另一種是事件重疊(event overlap)的情況,此時兩個事件相隔事件很小以致于容易被誤判為一個事件,
微尺度窗掃描很難判斷所檢測到的時間是否是長暫態的一部分,或者說兩個不同事件的重疊,因此,在NILM系統中,事件檢測將不是完全獨立地作業,而是需要與負荷特征聯合應用于電器識別,如果存在兩個靠得很近的事件,NILM將會識別第一個事件屬于某個電器,如果識別失敗,則會將整個暫態區間看作是一個事件,微尺度窗掃描確保在更精細的尺度上不會錯過任何可能的事件,而負荷特征則確保檢測出真正以提高NILM系統性能,由于本論文側重點在于事件檢測,因此,將每一個檢測到的事件看作是一個獨立的事件,而不去進一步區分是否是屬于近同時的兩個或多個事件,
[chenxy]以上關于微尺度窗掃描這一段的邏輯,感覺沒有get到作者的point,不是很有把握,,,還有待反復咀嚼確認,
3.5 Threshold Updating
在沒有事件檢測到的區間,資料樣本將用于均值(mean)和標準差(standard deviation)的計算,標準差反映了資料樣點的波動程度,門限用于確定是否有事件發生,如果采用針對常規小波動條件下優化得到的固定門限的話,在資料波動較大因而標準差較大的時候容易發生判斷錯誤,為了解決這個問題,考慮根據前述估計得到的標準差適應性地更新門限值,
進一步,門限更新應該主要基于電器特性,在本論文中,在所有備測電器中洗衣機的功耗曲線有最大的波動(highest variation),為了減輕波動帶來的問題,當標準差的20%超過初始門限時,將門限更新為標準差的20%,
![]()
[chenxy]一旦更新為新的門限后,當下一個時間段的標準差又變小了的時候,門限是否恢復呢?
3.6 Load signatures and Sequential LS Tree
本節內容是談負荷特征提取的,
這個留待以后再討論(真實原因是寫累了,,,要歇一歇恢復一下元氣^-^)
4. 小結
以上所述的幾個演算法要點中,宏/微尺度窗掃描相關部分還有一些疑問,
本論文所討論的NILM系統,事件檢測需要于負荷特征提取乃至負荷分解電器識別以相對緊耦合的方式作業,這個有利有弊,利在于緊耦合通常能導致更高程度的演算法優化,弊在于演算法的通用性(泛化能力)降低以及開發評估的難度加大,
本論文的后半部分描述案例分析,在各種資料集上的對比測驗性能bla-bla...留待以后再討論(真實原因同上^-^)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/357215.html
標籤:其他
上一篇:[ C語言 ] 掃雷 ------> 用C語言實作game2
下一篇:opencv圖片處理