無線傳感器網路Dv-hop定位演算法
文章目錄
- 無線傳感器網路Dv-hop定位演算法
- 1.演算法原理
- 2.演算法測驗
- 3.參考文獻
- 4.Matlab代碼
摘要:根據距離矢量和 GPS定位原理,2001年,Nieuleseu等人提出了 DV-Hop傳感器節點定位演算法,其只包含少數錨節點,剩余節點為未知節點,需要通過定位演算法來確定它們的位置,具有無需測量距離,硬體要求低等點,在硬體條件有限的WSN得到了廣泛的應用,
1.演算法原理
DV-Hop演算法的定位步驟如下:
(1)各錨節點向通信范圍內的鄰居節點廣播自身的位置資訊,接收節點則記錄到每個錨節點的最小跳數,同時忽略來自同一個錨節點的較大的跳數資訊,而后將跳數值加1轉發給鄰居節點,
(2)每個錨節點根據所記錄的其他錨節點的坐標資訊和跳數,通過式(1)估算網路平均跳距距離,
H
o
p
S
i
z
e
i
=
∑
j
≠
i
(
x
i
?
x
j
)
2
+
(
y
i
?
y
j
)
2
∑
j
≠
i
h
o
p
S
i
j
(1)
HopSize_i=\frac{\sum_{j\neq i}\sqrt{(x_i-x_j)^2+(y_i-y_j)^2}}{\sum_{j\neq i }hopS_{ij}}\tag{1}
HopSizei?=∑j?=i?hopSij?∑j?=i?(xi??xj?)2+(yi??yj?)2
??(1)
式中,
j
j
j為錨節點
i
i
i資料表中的其他錨節點號,
h
o
p
S
i
j
hopS_{ij}
hopSij? 為錨節點
i
i
i和
j
j
j??之間的跳數,
錨節點將所計算的平均跳距廣播至整個網路后,未知節點僅記錄所收到的第一個平均跳距,并向鄰居節點轉發,未知節點接收到平均跳距后,跟據所記錄的跳數資訊,按式(2)估算未知節點 i 到某個錨節點的距離:
L
i
=
S
i
?
H
o
p
S
i
z
e
(2)
L_i=S_i*HopSize \tag{2}
Li?=Si??HopSize(2)
(3)設
P
1
(
x
1
,
y
1
)
,
.
.
.
,
P
n
(
x
n
,
y
n
)
P_1(x_1,y_1),...,P_n(x_n,y_n)
P1?(x1?,y1?),...,Pn?(xn?,yn?)表示
n
n
n個錨節點的坐標位置,待定位節點D的位置為
(
x
,
y
)
(x,y)
(x,y) ,其與標節點估計距離分別為
d
1
,
d
2
,
.
.
.
,
d
n
?
1
d_1,d_2,...,d_{n-1}
d1?,d2?,...,dn?1?? ,可以建立式(3)的方程,
{
(
x
1
?
x
)
2
+
(
y
1
?
y
)
2
=
d
1
2
(
x
2
?
x
)
2
+
(
y
2
?
y
)
2
=
d
2
2
.
.
.
(
x
n
?
x
)
2
+
(
y
n
?
y
)
2
=
d
n
2
(3)
\begin{cases} (x_1-x)^2+(y_1-y)^2=d_1^2\\ (x_2-x)^2+(y_2-y)^2=d_2^2\\ ...\\ (x_n-x)^2+(y_n-y)^2=d_n^2 \end{cases}\tag{3}
??????????(x1??x)2+(y1??y)2=d12?(x2??x)2+(y2??y)2=d22?...(xn??x)2+(yn??y)2=dn2??(3)
第一個方程組減去第后一個方程后,到得:
{
2
(
x
1
?
x
n
)
x
+
2
(
y
1
?
y
n
)
y
=
x
1
2
?
x
n
2
+
y
1
2
?
y
n
2
?
d
1
2
+
d
n
2
2
(
x
2
?
x
n
)
x
+
2
(
y
2
?
y
n
)
y
=
x
2
2
?
x
n
2
+
y
2
2
?
y
n
2
?
d
2
2
+
d
n
2
.
.
.
2
(
x
n
?
1
?
x
n
)
x
+
2
(
y
n
?
1
?
y
n
)
y
=
x
n
?
1
2
?
x
n
2
+
y
n
?
1
2
?
y
n
2
?
d
n
?
1
2
+
d
n
2
(4)
\begin{cases} 2(x_1-x_n)x+2(y_1-y_n)y=x_1^2-x_n^2+y_1^2-y_n^2-d_1^2+d_n^2\\ 2(x_2-x_n)x+2(y_2-y_n)y=x_2^2-x_n^2+y_2^2-y_n^2-d_2^2+d_n^2\\ ...\\ 2(x_{n-1}-x_n)x+2(y_{n-1}-y_n)y=x_{n-1}^2-x_n^2+y_{n-1}^2-y_n^2-d_{n-1}^2+d_n^2\\ \end{cases}\tag{4}
??????????2(x1??xn?)x+2(y1??yn?)y=x12??xn2?+y12??yn2??d12?+dn2?2(x2??xn?)x+2(y2??yn?)y=x22??xn2?+y22??yn2??d22?+dn2?...2(xn?1??xn?)x+2(yn?1??yn?)y=xn?12??xn2?+yn?12??yn2??dn?12?+dn2??(4)
用線性方程組表示為
A
L
=
b
AL = b
AL=b,其中,
A
=
[
2
(
x
1
?
x
n
)
2
(
y
1
,
y
n
)
.
.
.
.
.
.
2
(
x
n
?
1
?
x
n
)
2
(
y
n
?
1
?
y
n
)
]
(5)
A=\left[\begin{matrix} 2(x_1-x_n)&2(y_1,y_n)\\ ...&...\\ 2(x_{n-1}-x_n)&2(y_{n-1}-y_n) \end{matrix}\right]\tag{5}
A=???2(x1??xn?)...2(xn?1??xn?)?2(y1?,yn?)...2(yn?1??yn?)????(5)
L = [ x y ] (6) L=\left[\begin{matrix} x\\ y\end{matrix}\right]\tag{6} L=[xy?](6)
b = [ x 1 2 ? x n 2 + y 1 2 ? y n 2 + d n 2 ? d 1 2 . . . x n ? 1 2 ? x n 2 + y n ? 1 2 ? y n 2 + d n 2 ? d n ? 1 2 ] (7) b=\left[\begin{matrix} x_1^2-x_n^2+y_1^2-y_n^2+d_n^2-d_1^2\\ ...\\ x_{n-1}^2-x_n^2+y_{n-1}^2-y_n^2+d_n^2-d_{n-1}^2 \end{matrix}\right]\tag{7} b=???x12??xn2?+y12??yn2?+dn2??d12?...xn?12??xn2?+yn?12??yn2?+dn2??dn?12?????(7)
采用最小二乘法得到方程組的解為:
L
=
(
A
T
A
)
?
1
A
T
b
L=(A^TA)^-1A^Tb
L=(ATA)?1ATb
2.演算法測驗
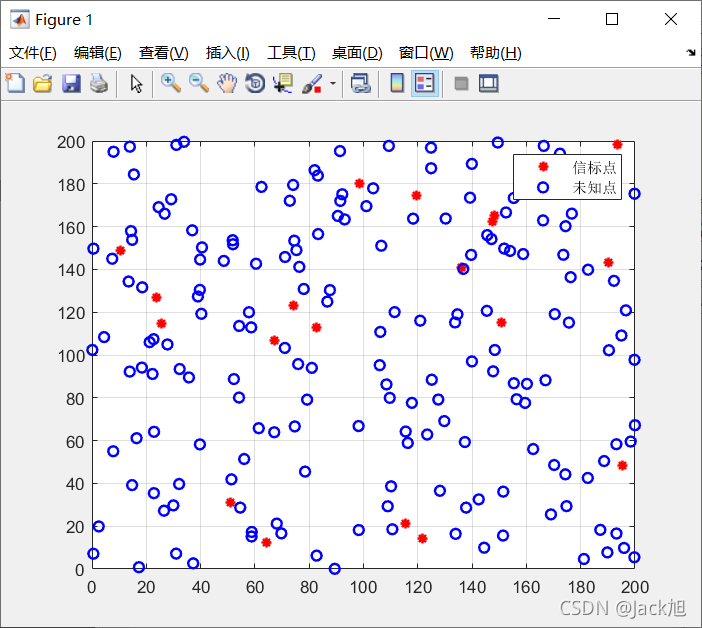
設定節點覆寫范圍為200x200,總節點數為:200,信標節點數20,通信半徑為30,未知節點數為180,采用歸一化平均定位誤差作為評價指標:
e
r
r
o
r
=
∑
i
=
1
m
(
x
i
?
x
i
?
)
2
+
(
y
i
?
y
i
?
)
2
k
?
m
?
r
(8)
error = \frac{\sum_{i=1}^m\sqrt{(x_i-x_i^*)^2+(y_i-y_i^*)^2}}{k*m*r}\tag{8}
error=k?m?r∑i=1m?(xi??xi??)2+(yi??yi??)2
??(8)
式中,
m
m
m為未知節點的數目;
k
k
k為實驗次數;
r
r
r?為節點的通信半徑;
(
x
i
,
y
i
)
(x_i,y_i)
(xi?,yi?)為未知節點的估計坐標;
(
x
i
?
,
y
i
?
)
(x_i^*,y_i^*)
(xi??,yi??)為該未知節點的真實坐標,
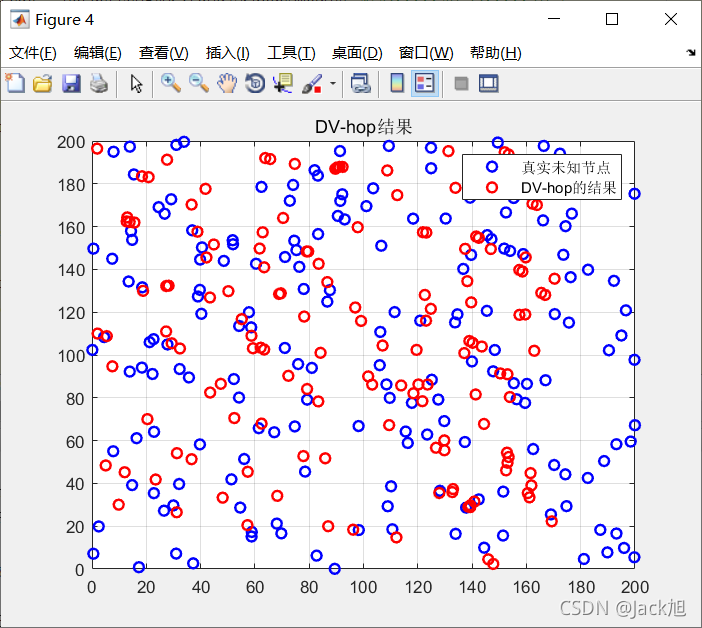
基礎DV-hop的歸一化定位誤差:0.5384
3.參考文獻
[1]吳曦德,方杰,楊世杰,周慶標.基于GPSO-DVHop的傳感器節點定位方法[J].計算機工程與應用,2013,49(22):95-99.
[1]張恒. 無線傳感器節點定位方法的研究與實作[D].華南理工大學,2012.
4.Matlab代碼
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/357263.html
標籤:其他