聊一聊計算機視覺中常用的注意力機制以及Pytorch代碼實作
注意力機制(Attention)是深度學習中常用的tricks,可以在模型原有的基礎上直接插入,進一步增強你模型的性能,注意力機制起初是作為自然語言處理中的作業Attention Is All You Need被大家所熟知,從而也引發了一系列的XX is All You Need的論文命題,SENET-Squeeze-and-Excitation Networks是注意力機制在計算機視覺中應用的早期作業之一,并獲得了2017年imagenet, 同時也是最后一屆Imagenet比賽的冠軍,后面就又出現了各種各樣的注意力機制,應用在計算機視覺的任務中,今天我們就來一起聊一聊計算機視覺中常用的注意力機制以及他們對應的Pytorch代碼實作,另外我還使用這些注意力機制做了一些目標檢測的實驗,實驗效果我也一并放在博客中,大家可以一起對自己感興趣的部分討論討論,
新出的手把手教程,感興趣的兄弟們快去自己動手試試看!
手把手教你使用YOLOV5訓練自己的目標檢測模型-口罩檢測-視頻教程_dejahu的博客-CSDN博客
這里是我資料集的基本情況,這里我使用的是交通標志檢測的資料集
CocoDataset Train dataset with number of images 2226, and instance counts:
+------------+-------+-----------+-------+-----------+-------+-----------------------------+-------+---------------------+-------+
| category | count | category | count | category | count | category | count | category | count |
+------------+-------+-----------+-------+-----------+-------+-----------------------------+-------+---------------------+-------+
| 0 [red_tl] | 1465 | 1 [arr_s] | 1133 | 2 [arr_l] | 638 | 3 [no_driving_mark_allsort] | 622 | 4 [no_parking_mark] | 1142 |
+------------+-------+-----------+-------+-----------+-------+-----------------------------+-------+---------------------+-------+
baseline選擇的是fasterrcnn,實驗的結果如下:
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.341
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.502
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.400
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.115
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.473
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.655
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.417
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.417
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.417
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.156
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.570
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.726
如果大家遇到論文下載比較慢
推薦使用中科院的 arxiv 鏡像: http://xxx.itp.ac.cn, 國內網路能流暢訪問
簡單直接的方法是, 把要訪問 arxiv 鏈接中的域名從 https://arxiv.org 換成 http://xxx.itp.ac.cn , 比如:
從 https://arxiv.org/abs/1901.07249 改為 http://xxx.itp.ac.cn/abs/1901.07249
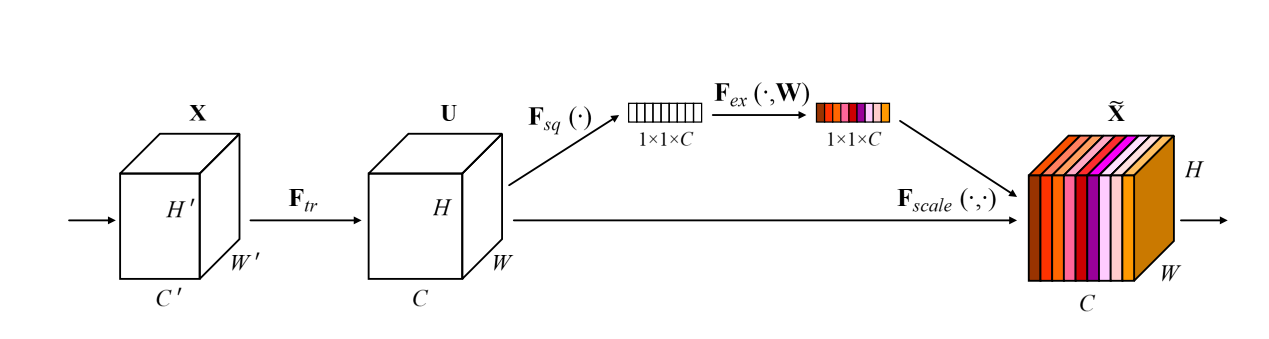
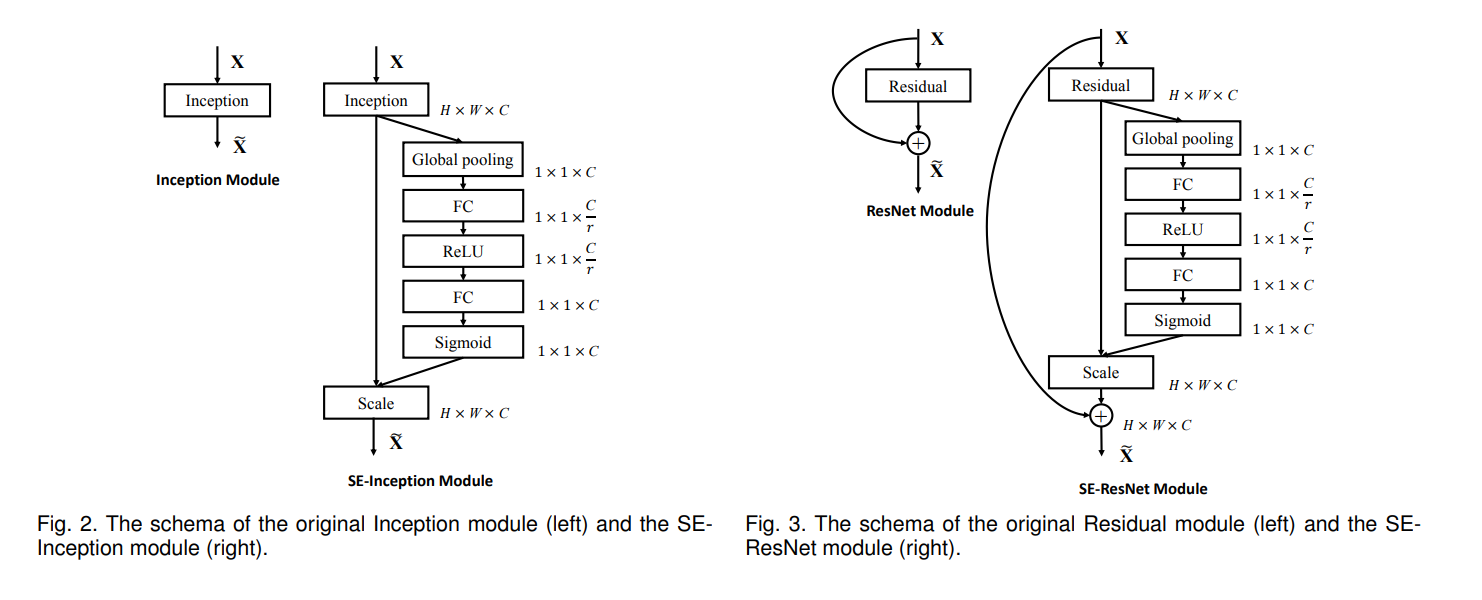
1. SeNet: Squeeze-and-Excitation Attention
論文地址:https://arxiv.org/abs/1709.01507
-
網路結構
對通道做注意力機制,通過全連接層對每個通道進行加權,
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init class SEAttention(nn.Module): def __init__(self, channel=512, reduction=16): super().__init__() self.avg_pool = nn.AdaptiveAvgPool2d(1) self.fc = nn.Sequential( nn.Linear(channel, channel // reduction, bias=False), nn.ReLU(inplace=True), nn.Linear(channel // reduction, channel, bias=False), nn.Sigmoid() ) def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) def forward(self, x): b, c, _, _ = x.size() y = self.avg_pool(x).view(b, c) y = self.fc(y).view(b, c, 1, 1) return x * y.expand_as(x) if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) se = SEAttention(channel=512, reduction=8) output = se(input) print(output.shape) -
實驗結果
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.338 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.511 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.375 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.126 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.458 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.696 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.411 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.411 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.411 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.163 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.551 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.758
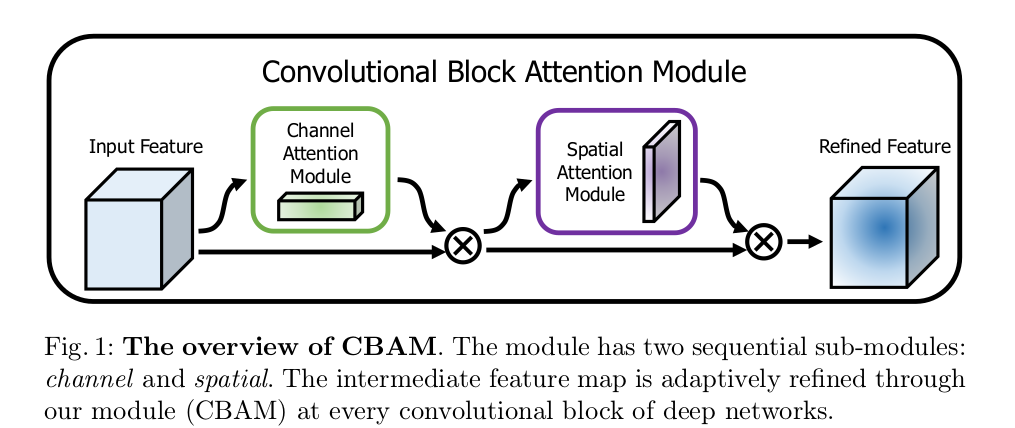
2. (有用)CBAM: Convolutional Block Attention Module
論文地址:CBAM: Convolutional Block Attention Module
-
網路結構
對通道方向上做注意力機制之后再對空間方向上做注意力機制
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init class ChannelAttention(nn.Module): def __init__(self, channel, reduction=16): super().__init__() self.maxpool = nn.AdaptiveMaxPool2d(1) self.avgpool = nn.AdaptiveAvgPool2d(1) self.se = nn.Sequential( nn.Conv2d(channel, channel // reduction, 1, bias=False), nn.ReLU(), nn.Conv2d(channel // reduction, channel, 1, bias=False) ) self.sigmoid = nn.Sigmoid() def forward(self, x): max_result = self.maxpool(x) avg_result = self.avgpool(x) max_out = self.se(max_result) avg_out = self.se(avg_result) output = self.sigmoid(max_out + avg_out) return output class SpatialAttention(nn.Module): def __init__(self, kernel_size=7): super().__init__() self.conv = nn.Conv2d(2, 1, kernel_size=kernel_size, padding=kernel_size // 2) self.sigmoid = nn.Sigmoid() def forward(self, x): max_result, _ = torch.max(x, dim=1, keepdim=True) avg_result = torch.mean(x, dim=1, keepdim=True) result = torch.cat([max_result, avg_result], 1) output = self.conv(result) output = self.sigmoid(output) return output class CBAMBlock(nn.Module): def __init__(self, channel=512, reduction=16, kernel_size=49): super().__init__() self.ca = ChannelAttention(channel=channel, reduction=reduction) self.sa = SpatialAttention(kernel_size=kernel_size) def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) def forward(self, x): b, c, _, _ = x.size() residual = x out = x * self.ca(x) out = out * self.sa(out) return out + residual if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) kernel_size = input.shape[2] cbam = CBAMBlock(channel=512, reduction=16, kernel_size=kernel_size) output = cbam(input) print(output.shape) -
實驗結果
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.364 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.544 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.425 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.137 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.499 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.674 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.439 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.439 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.439 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.185 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.590 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.755
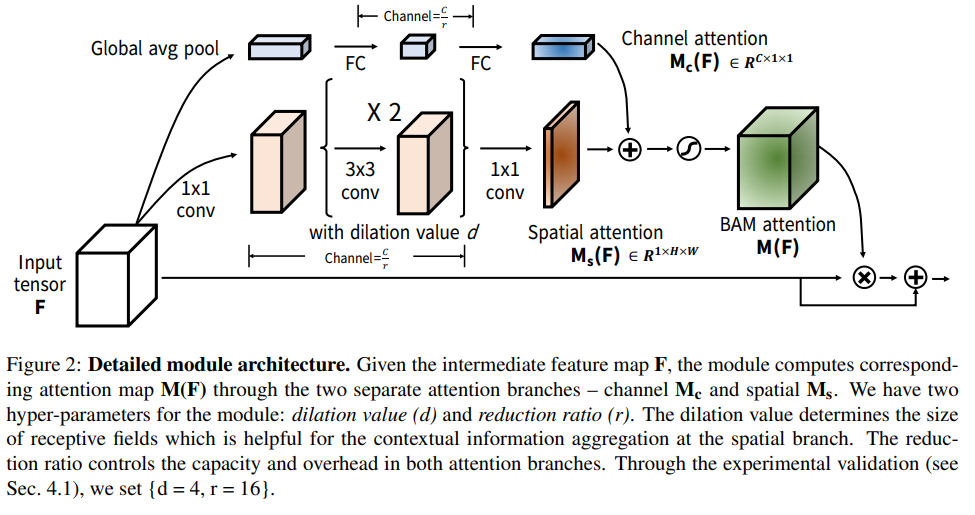
3. BAM: Bottleneck Attention Module
論文地址:https://arxiv.org/pdf/1807.06514.pdf
-
網路結構
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init class Flatten(nn.Module): def forward(self, x): return x.view(x.shape[0], -1) class ChannelAttention(nn.Module): def __init__(self, channel, reduction=16, num_layers=3): super().__init__() self.avgpool = nn.AdaptiveAvgPool2d(1) gate_channels = [channel] gate_channels += [channel // reduction] * num_layers gate_channels += [channel] self.ca = nn.Sequential() self.ca.add_module('flatten', Flatten()) for i in range(len(gate_channels) - 2): self.ca.add_module('fc%d' % i, nn.Linear(gate_channels[i], gate_channels[i + 1])) self.ca.add_module('bn%d' % i, nn.BatchNorm1d(gate_channels[i + 1])) self.ca.add_module('relu%d' % i, nn.ReLU()) self.ca.add_module('last_fc', nn.Linear(gate_channels[-2], gate_channels[-1])) def forward(self, x): res = self.avgpool(x) res = self.ca(res) res = res.unsqueeze(-1).unsqueeze(-1).expand_as(x) return res class SpatialAttention(nn.Module): def __init__(self, channel, reduction=16, num_layers=3, dia_val=2): super().__init__() self.sa = nn.Sequential() self.sa.add_module('conv_reduce1', nn.Conv2d(kernel_size=1, in_channels=channel, out_channels=channel // reduction)) self.sa.add_module('bn_reduce1', nn.BatchNorm2d(channel // reduction)) self.sa.add_module('relu_reduce1', nn.ReLU()) for i in range(num_layers): self.sa.add_module('conv_%d' % i, nn.Conv2d(kernel_size=3, in_channels=channel // reduction, out_channels=channel // reduction, padding=1, dilation=dia_val)) self.sa.add_module('bn_%d' % i, nn.BatchNorm2d(channel // reduction)) self.sa.add_module('relu_%d' % i, nn.ReLU()) self.sa.add_module('last_conv', nn.Conv2d(channel // reduction, 1, kernel_size=1)) def forward(self, x): res = self.sa(x) res = res.expand_as(x) return res class BAMBlock(nn.Module): def __init__(self, channel=512, reduction=16, dia_val=2): super().__init__() self.ca = ChannelAttention(channel=channel, reduction=reduction) self.sa = SpatialAttention(channel=channel, reduction=reduction, dia_val=dia_val) self.sigmoid = nn.Sigmoid() def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) def forward(self, x): b, c, _, _ = x.size() sa_out = self.sa(x) ca_out = self.ca(x) weight = self.sigmoid(sa_out + ca_out) out = (1 + weight) * x return out if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) bam = BAMBlock(channel=512, reduction=16, dia_val=2) output = bam(input) print(output.shape) -
實驗結果
無
4. (有用)ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks
論文地址:https://arxiv.org/pdf/1910.03151.pdf
-
網路結構
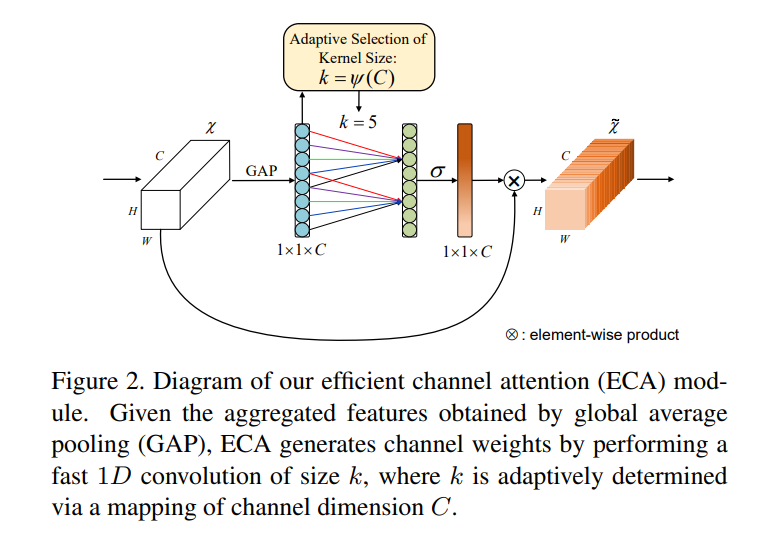
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init from collections import OrderedDict class ECAAttention(nn.Module): def __init__(self, kernel_size=3): super().__init__() self.gap = nn.AdaptiveAvgPool2d(1) self.conv = nn.Conv1d(1, 1, kernel_size=kernel_size, padding=(kernel_size - 1) // 2) self.sigmoid = nn.Sigmoid() def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) def forward(self, x): y = self.gap(x) # bs,c,1,1 y = y.squeeze(-1).permute(0, 2, 1) # bs,1,c y = self.conv(y) # bs,1,c y = self.sigmoid(y) # bs,1,c y = y.permute(0, 2, 1).unsqueeze(-1) # bs,c,1,1 return x * y.expand_as(x) if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) eca = ECAAttention(kernel_size=3) output = eca(input) print(output.shape) -
實驗結果
2021-12-17 12:18:08,911 - mmdet - INFO - Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.360 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.545 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.414 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.141 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.489 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.676 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.432 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.432 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.432 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.184 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.576 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.748
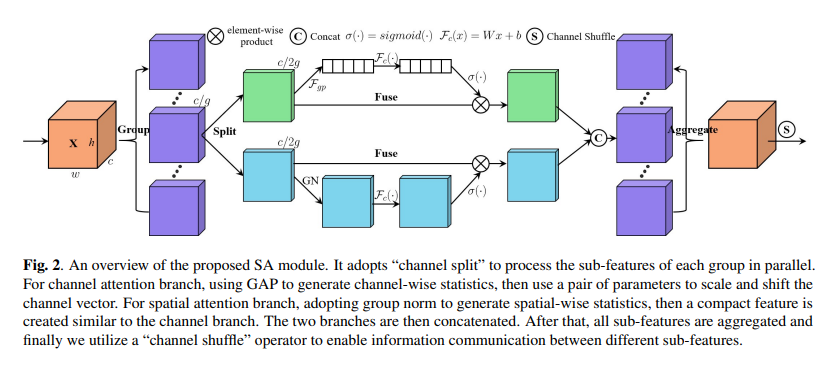
5. SA-NET: SHUFFLE ATTENTION FOR DEEP CONVOLUTIONAL NEURAL NETWORKS
論文地址:https://arxiv.org/pdf/2102.00240.pdf
-
網路結構
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init from torch.nn.parameter import Parameter class ShuffleAttention(nn.Module): def __init__(self, channel=512, reduction=16, G=8): super().__init__() self.G = G self.channel = channel self.avg_pool = nn.AdaptiveAvgPool2d(1) self.gn = nn.GroupNorm(channel // (2 * G), channel // (2 * G)) self.cweight = Parameter(torch.zeros(1, channel // (2 * G), 1, 1)) self.cbias = Parameter(torch.ones(1, channel // (2 * G), 1, 1)) self.sweight = Parameter(torch.zeros(1, channel // (2 * G), 1, 1)) self.sbias = Parameter(torch.ones(1, channel // (2 * G), 1, 1)) self.sigmoid = nn.Sigmoid() def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) @staticmethod def channel_shuffle(x, groups): b, c, h, w = x.shape x = x.reshape(b, groups, -1, h, w) x = x.permute(0, 2, 1, 3, 4) # flatten x = x.reshape(b, -1, h, w) return x def forward(self, x): b, c, h, w = x.size() # group into subfeatures x = x.view(b * self.G, -1, h, w) # bs*G,c//G,h,w # channel_split x_0, x_1 = x.chunk(2, dim=1) # bs*G,c//(2*G),h,w # channel attention x_channel = self.avg_pool(x_0) # bs*G,c//(2*G),1,1 x_channel = self.cweight * x_channel + self.cbias # bs*G,c//(2*G),1,1 x_channel = x_0 * self.sigmoid(x_channel) # spatial attention x_spatial = self.gn(x_1) # bs*G,c//(2*G),h,w x_spatial = self.sweight * x_spatial + self.sbias # bs*G,c//(2*G),h,w x_spatial = x_1 * self.sigmoid(x_spatial) # bs*G,c//(2*G),h,w # concatenate along channel axis out = torch.cat([x_channel, x_spatial], dim=1) # bs*G,c//G,h,w out = out.contiguous().view(b, -1, h, w) # channel shuffle out = self.channel_shuffle(out, 2) return out if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) se = ShuffleAttention(channel=512, G=8) output = se(input) print(output.shape) -
實驗結果
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.350 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.523 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.401 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.123 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.479 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.662 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.160 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.576 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.733
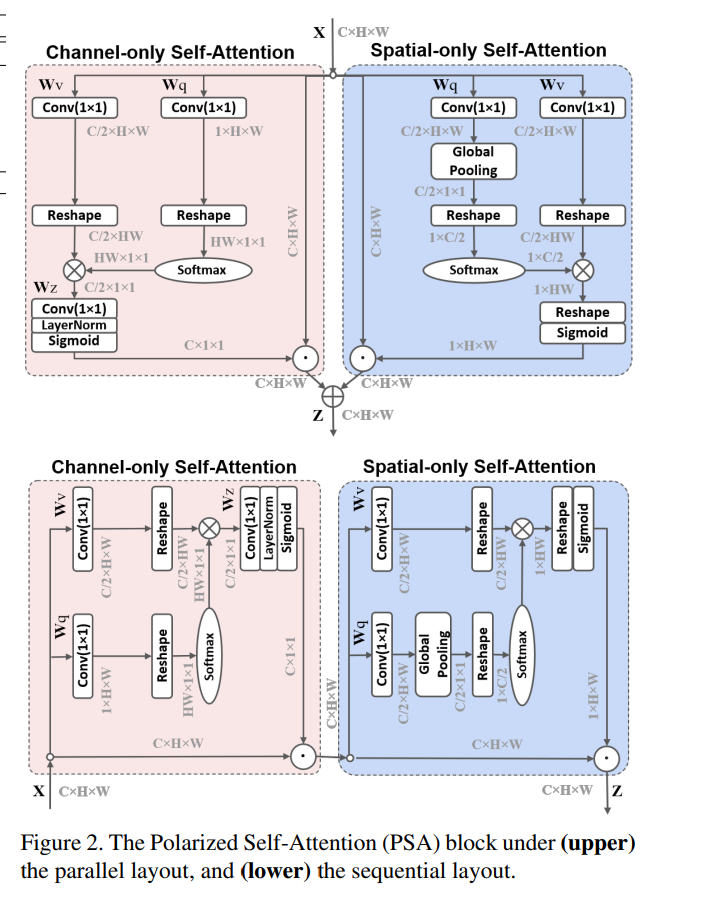
6. Polarized Self-Attention: Towards High-quality Pixel-wise Regression
論文地址:https://arxiv.org/abs/2107.00782
-
網路結構
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init class ParallelPolarizedSelfAttention(nn.Module): def __init__(self, channel=512): super().__init__() self.ch_wv = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.ch_wq = nn.Conv2d(channel, 1, kernel_size=(1, 1)) self.softmax_channel = nn.Softmax(1) self.softmax_spatial = nn.Softmax(-1) self.ch_wz = nn.Conv2d(channel // 2, channel, kernel_size=(1, 1)) self.ln = nn.LayerNorm(channel) self.sigmoid = nn.Sigmoid() self.sp_wv = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.sp_wq = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.agp = nn.AdaptiveAvgPool2d((1, 1)) def forward(self, x): b, c, h, w = x.size() # Channel-only Self-Attention channel_wv = self.ch_wv(x) # bs,c//2,h,w channel_wq = self.ch_wq(x) # bs,1,h,w channel_wv = channel_wv.reshape(b, c // 2, -1) # bs,c//2,h*w channel_wq = channel_wq.reshape(b, -1, 1) # bs,h*w,1 channel_wq = self.softmax_channel(channel_wq) channel_wz = torch.matmul(channel_wv, channel_wq).unsqueeze(-1) # bs,c//2,1,1 channel_weight = self.sigmoid(self.ln(self.ch_wz(channel_wz).reshape(b, c, 1).permute(0, 2, 1))).permute(0, 2, 1).reshape( b, c, 1, 1) # bs,c,1,1 channel_out = channel_weight * x # Spatial-only Self-Attention spatial_wv = self.sp_wv(x) # bs,c//2,h,w spatial_wq = self.sp_wq(x) # bs,c//2,h,w spatial_wq = self.agp(spatial_wq) # bs,c//2,1,1 spatial_wv = spatial_wv.reshape(b, c // 2, -1) # bs,c//2,h*w spatial_wq = spatial_wq.permute(0, 2, 3, 1).reshape(b, 1, c // 2) # bs,1,c//2 spatial_wq = self.softmax_spatial(spatial_wq) spatial_wz = torch.matmul(spatial_wq, spatial_wv) # bs,1,h*w spatial_weight = self.sigmoid(spatial_wz.reshape(b, 1, h, w)) # bs,1,h,w spatial_out = spatial_weight * x out = spatial_out + channel_out return out class SequentialPolarizedSelfAttention(nn.Module): def __init__(self, channel=512): super().__init__() self.ch_wv = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.ch_wq = nn.Conv2d(channel, 1, kernel_size=(1, 1)) self.softmax_channel = nn.Softmax(1) self.softmax_spatial = nn.Softmax(-1) self.ch_wz = nn.Conv2d(channel // 2, channel, kernel_size=(1, 1)) self.ln = nn.LayerNorm(channel) self.sigmoid = nn.Sigmoid() self.sp_wv = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.sp_wq = nn.Conv2d(channel, channel // 2, kernel_size=(1, 1)) self.agp = nn.AdaptiveAvgPool2d((1, 1)) def forward(self, x): b, c, h, w = x.size() # Channel-only Self-Attention channel_wv = self.ch_wv(x) # bs,c//2,h,w channel_wq = self.ch_wq(x) # bs,1,h,w channel_wv = channel_wv.reshape(b, c // 2, -1) # bs,c//2,h*w channel_wq = channel_wq.reshape(b, -1, 1) # bs,h*w,1 channel_wq = self.softmax_channel(channel_wq) channel_wz = torch.matmul(channel_wv, channel_wq).unsqueeze(-1) # bs,c//2,1,1 channel_weight = self.sigmoid(self.ln(self.ch_wz(channel_wz).reshape(b, c, 1).permute(0, 2, 1))).permute(0, 2, 1).reshape( b, c, 1, 1) # bs,c,1,1 channel_out = channel_weight * x # Spatial-only Self-Attention spatial_wv = self.sp_wv(channel_out) # bs,c//2,h,w spatial_wq = self.sp_wq(channel_out) # bs,c//2,h,w spatial_wq = self.agp(spatial_wq) # bs,c//2,1,1 spatial_wv = spatial_wv.reshape(b, c // 2, -1) # bs,c//2,h*w spatial_wq = spatial_wq.permute(0, 2, 3, 1).reshape(b, 1, c // 2) # bs,1,c//2 spatial_wq = self.softmax_spatial(spatial_wq) spatial_wz = torch.matmul(spatial_wq, spatial_wv) # bs,1,h*w spatial_weight = self.sigmoid(spatial_wz.reshape(b, 1, h, w)) # bs,1,h,w spatial_out = spatial_weight * channel_out return spatial_out if __name__ == '__main__': input = torch.randn(1, 512, 7, 7) psa = SequentialPolarizedSelfAttention(channel=512) output = psa(input) print(output.shape) -
實驗結果
2021-12-16 20:30:36,981 - mmdet - INFO - Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.346 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.522 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.385 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.123 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.474 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.676 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.422 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.422 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.422 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.170 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.570 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.743
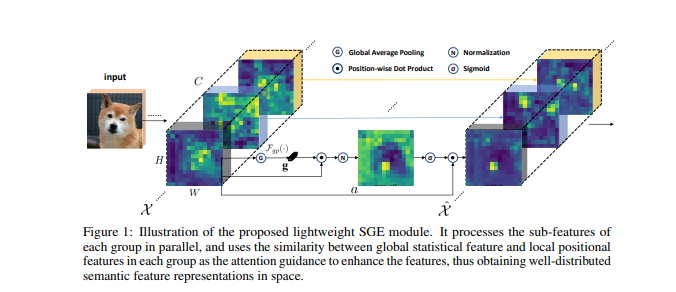
7. Spatial Group-wise Enhance: Improving Semantic Feature Learning in Convolutional Networks
論文地址:https://arxiv.org/pdf/1905.09646.pdf
-
網路結構
主要是用在語意分割上,所以在檢測上的效果一般,沒有帶來多少提升
-
Pytorch代碼
import numpy as np import torch from torch import nn from torch.nn import init class SpatialGroupEnhance(nn.Module): def __init__(self, groups): super().__init__() self.groups = groups self.avg_pool = nn.AdaptiveAvgPool2d(1) self.weight = nn.Parameter(torch.zeros(1, groups, 1, 1)) self.bias = nn.Parameter(torch.zeros(1, groups, 1, 1)) self.sig = nn.Sigmoid() self.init_weights() def init_weights(self): for m in self.modules(): if isinstance(m, nn.Conv2d): init.kaiming_normal_(m.weight, mode='fan_out') if m.bias is not None: init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): init.constant_(m.weight, 1) init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): init.normal_(m.weight, std=0.001) if m.bias is not None: init.constant_(m.bias, 0) def forward(self, x): b, c, h, w = x.shape x = x.view(b * self.groups, -1, h, w) # bs*g,dim//g,h,w xn = x * self.avg_pool(x) # bs*g,dim//g,h,w xn = xn.sum(dim=1, keepdim=True) # bs*g,1,h,w t = xn.view(b * self.groups, -1) # bs*g,h*w t = t - t.mean(dim=1, keepdim=True) # bs*g,h*w std = t.std(dim=1, keepdim=True) + 1e-5 t = t / std # bs*g,h*w t = t.view(b, self.groups, h, w) # bs,g,h*w t = t * self.weight + self.bias # bs,g,h*w t = t.view(b * self.groups, 1, h, w) # bs*g,1,h*w x = x * self.sig(t) x = x.view(b, c, h, w) return x if __name__ == '__main__': input = torch.randn(50, 512, 7, 7) sge = SpatialGroupEnhance(groups=8) output = sge(input) print(output.shape) -
實驗結果
2021-12-16 21:39:42,785 - mmdet - INFO - Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.342 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.516 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.381 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.117 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.474 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.652 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.415 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.415 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.415 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.155 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.565 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.718
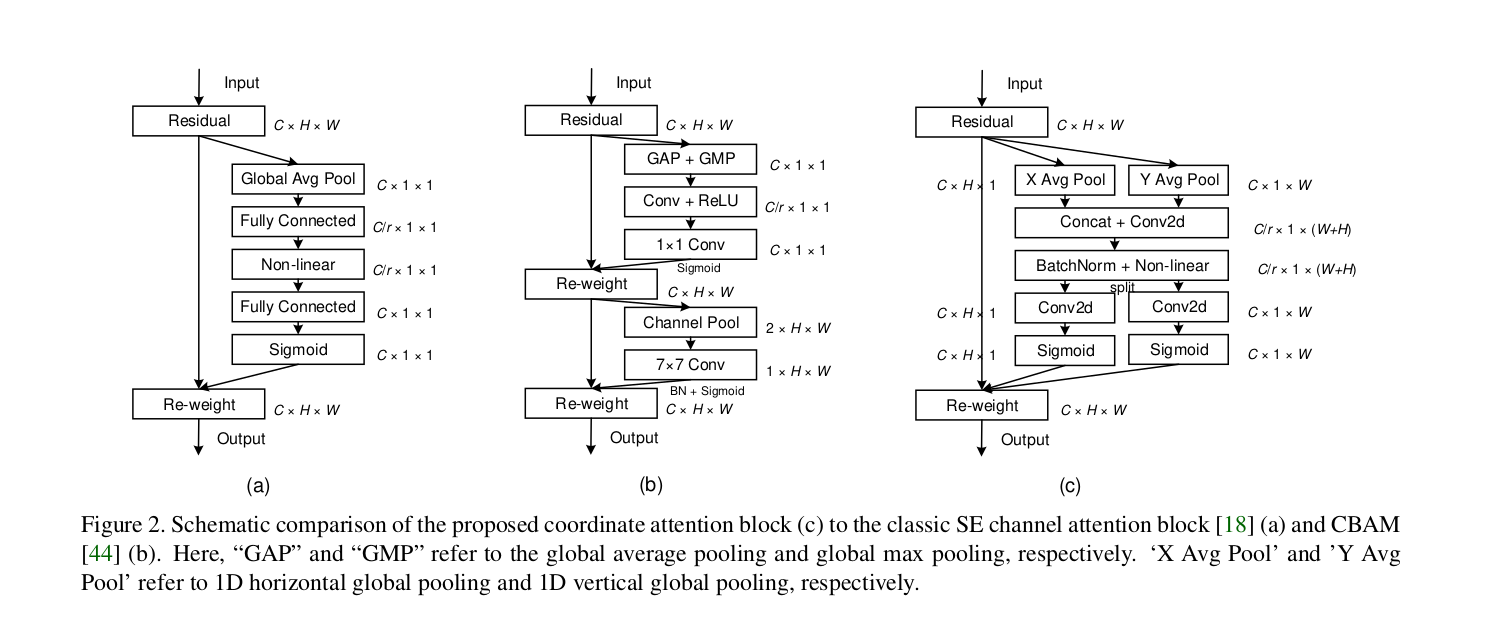
8. Coordinate Attention for Efficient Mobile Network Design
論文地址:https://arxiv.org/abs/2103.02907
-
網路結構
主要應用在輕量級網路上,在resnet系列上效果不好,
-
Pytorch代碼
import torch import torch.nn as nn import torch.nn.functional as F class h_sigmoid(nn.Module): def __init__(self, inplace=True): super(h_sigmoid, self).__init__() self.relu = nn.ReLU6(inplace=inplace) def forward(self, x): return self.relu(x + 3) / 6 class h_swish(nn.Module): def __init__(self, inplace=True): super(h_swish, self).__init__() self.sigmoid = h_sigmoid(inplace=inplace) def forward(self, x): return x * self.sigmoid(x) class CoordAtt(nn.Module): def __init__(self, inp, oup, reduction=32): super(CoordAtt, self).__init__() self.pool_h = nn.AdaptiveAvgPool2d((None, 1)) self.pool_w = nn.AdaptiveAvgPool2d((1, None)) mip = max(8, inp // reduction) self.conv1 = nn.Conv2d(inp, mip, kernel_size=1, stride=1, padding=0) self.bn1 = nn.BatchNorm2d(mip) self.act = h_swish() self.conv_h = nn.Conv2d(mip, oup, kernel_size=1, stride=1, padding=0) self.conv_w = nn.Conv2d(mip, oup, kernel_size=1, stride=1, padding=0) def forward(self, x): identity = x n, c, h, w = x.size() x_h = self.pool_h(x) x_w = self.pool_w(x).permute(0, 1, 3, 2) y = torch.cat([x_h, x_w], dim=2) y = self.conv1(y) y = self.bn1(y) y = self.act(y) x_h, x_w = torch.split(y, [h, w], dim=2) x_w = x_w.permute(0, 1, 3, 2) a_h = self.conv_h(x_h).sigmoid() a_w = self.conv_w(x_w).sigmoid() out = identity * a_w * a_h return out -
實驗結果
2021-12-16 19:04:16,776 - mmdet - INFO - Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.340 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.516 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.386 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.127 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.457 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.632 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.408 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.408 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.408 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.162 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.546 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.716
9. Global Attention Mechanism: Retain Information to Enhance Channel-Spatial Interactions
論文地址: https://arxiv.org/abs/2112.05561
-
網路結構
計算量特別大,效果一般
-
Pytorch代碼
class GAM_Attention(nn.Module): def __init__(self, in_channels, out_channels, rate=4): super(GAM_Attention, self).__init__() self.channel_attention = nn.Sequential( nn.Linear(in_channels, int(in_channels / rate)), nn.ReLU(inplace=True), nn.Linear(int(in_channels / rate), in_channels) ) self.spatial_attention = nn.Sequential( nn.Conv2d(in_channels, int(in_channels / rate), kernel_size=7, padding=3), nn.BatchNorm2d(int(in_channels / rate)), nn.ReLU(inplace=True), nn.Conv2d(int(in_channels / rate), out_channels, kernel_size=7, padding=3), nn.BatchNorm2d(out_channels) ) def forward(self, x): # print(x) b, c, h, w = x.shape x_permute = x.permute(0, 2, 3, 1).view(b, -1, c) x_att_permute = self.channel_attention(x_permute).view(b, h, w, c) x_channel_att = x_att_permute.permute(0, 3, 1, 2) x = x * x_channel_att x_spatial_att = self.spatial_attention(x).sigmoid() out = x * x_spatial_att # print(out) return out -
實驗結果
2021-12-16 16:14:20,693 - mmdet - INFO - Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.350 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=1000 ] = 0.530 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=1000 ] = 0.399 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.131 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.481 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.683 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=300 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=1000 ] = 0.424 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=1000 ] = 0.171 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=1000 ] = 0.575 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=1000 ] = 0.745
更多注意力
參考:https://github.com/xmu-xiaoma666/External-Attention-pytorch
另外還有一些用在語意分割上面的結構,這里就不測驗了,大家可以自行下去測驗
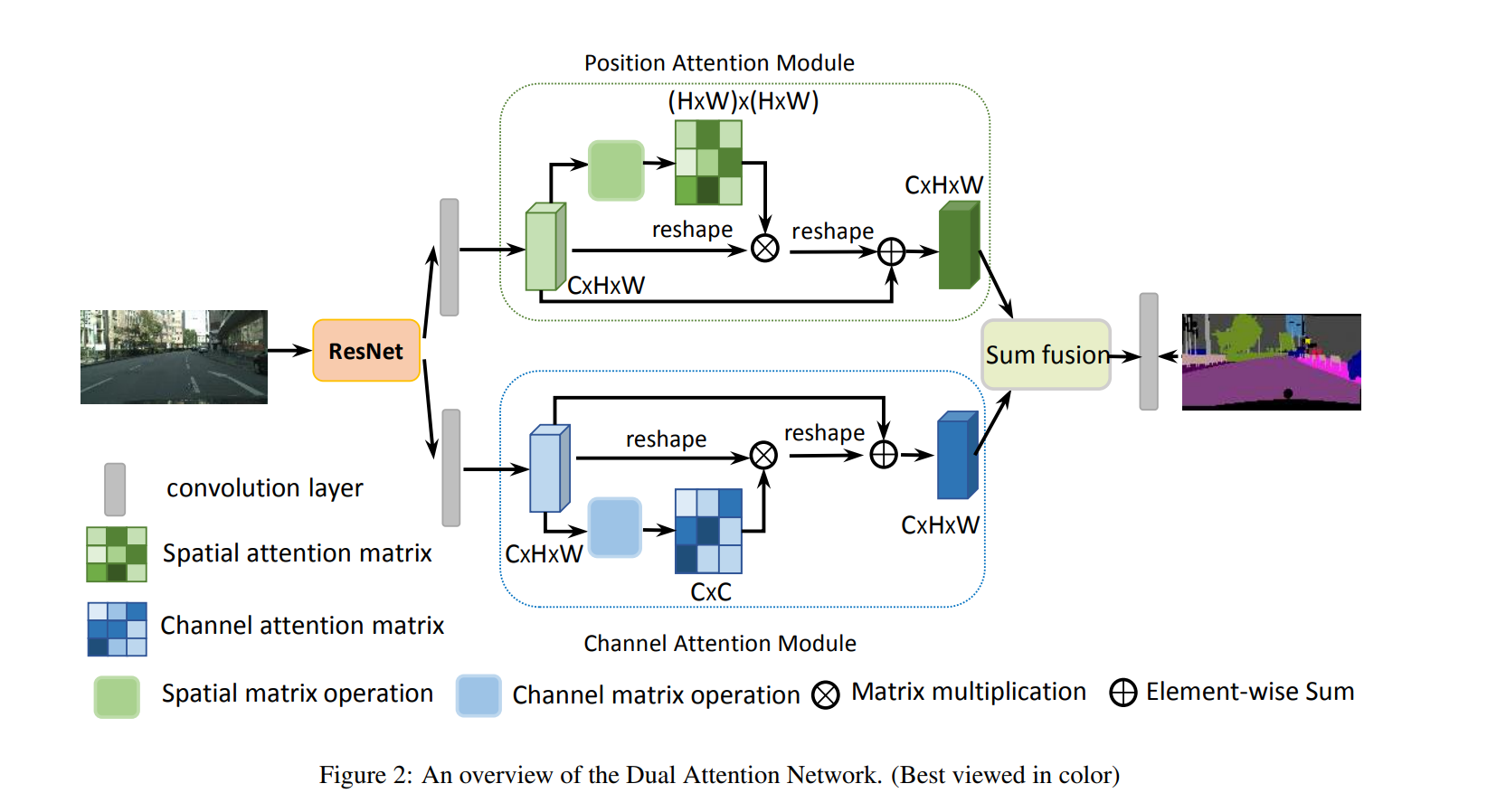
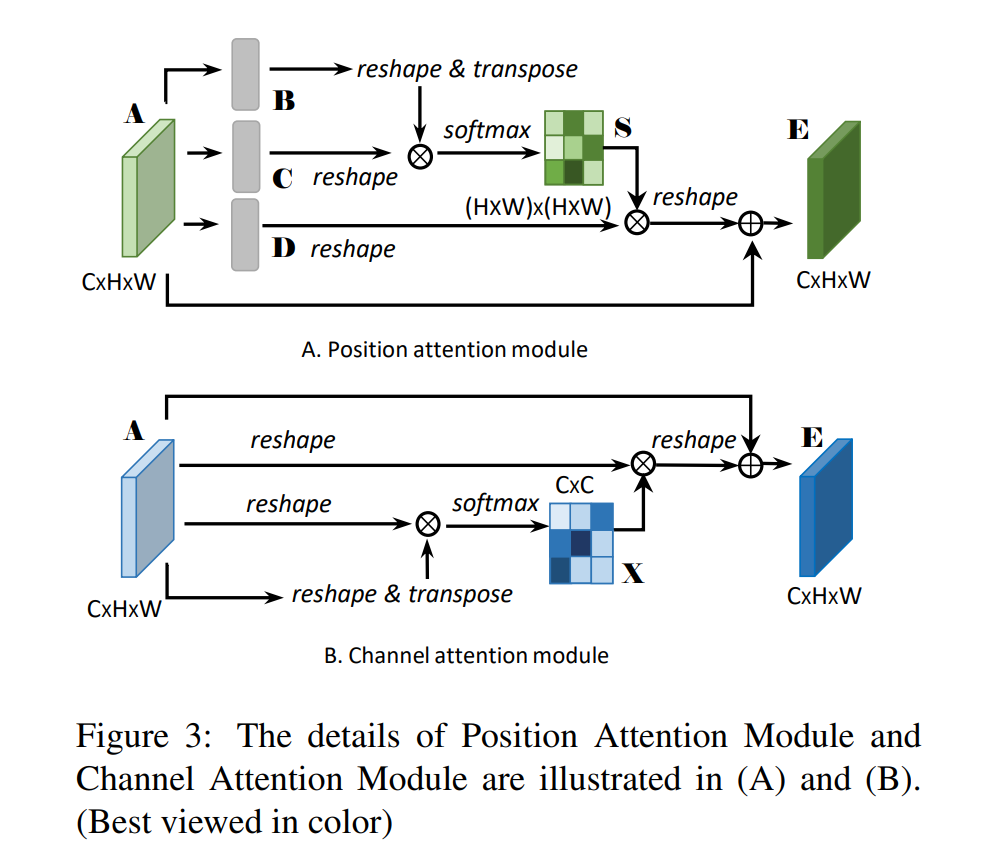
雙路注意力機制-DANET
論文標題:Fu_Dual_Attention_Network_for_Scene_Segmentation
論文地址:https://openaccess.thecvf.com/content_CVPR_2019/papers/Fu_Dual_Attention_Network_for_Scene_Segmentation_CVPR_2019_paper.pdf
時間:2019
相當于之前是并行的結構,現在改成了串行的結構然后做特征的concat
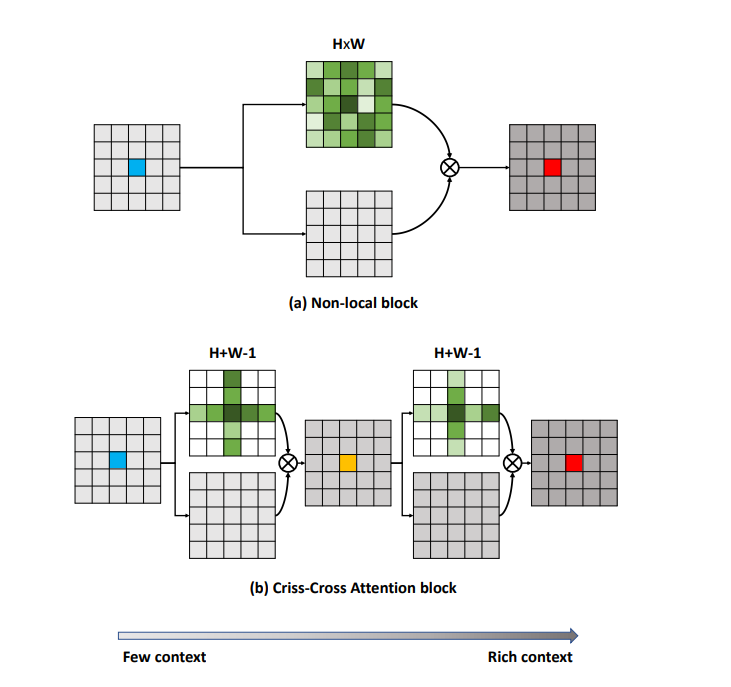
位置注意力-CCNET
在上面的danet上改的,主要是解決計算量的問題, 通過十字交叉的結構來解決
論文標題:CCNet: Criss-Cross Attention for Semantic Segmentation
論文地址:https://openaccess.thecvf.com/content_ICCV_2019/papers/Huang_CCNet_Criss-Cross_Attention_for_Semantic_Segmentation_ICCV_2019_paper.pdf
時:2019
找到我
你可以通過這些方式來尋找我,
B站:肆十二-
CSDN:肆十二
知乎:肆十二
微博:肆十二-
現在關注以后就是老朋友嘍!

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/384425.html
標籤:其他
上一篇:三子棋的實作
下一篇:Python對影像分割