本文為實驗流體力學課程作業,需用Matlab處理兩幅PIV影像來計算該流動的速度場,基于速度獲得流線與渦量場資訊,兩幅影像如下,本文根據所查資料,自己撰寫了Matlab代碼來處理,但Matlab工具箱中就有處理的PIVLab軟體,處理效果也更好,因此本文僅提供一種思路方法,


目錄
1 背景知識
1.1 PIV測速原理
1.2 互相關理論
2 代碼實作
2.1 預處理
2.2 速度計算
2.3 速度修正
2.4 計算渦量
2.5 繪制影像
3 完整代碼
1 背景知識
1.1 PIV測速原理
PIV全稱Particle Image Velocimetry(平面粒子成像測速),通過激光器和其他光學元件得到片光源,用其照亮摻有示蹤粒子的待測流體的待測片層(盡量使該片層內流體的流速都在該片層內),利用數碼照相機連續拍攝被照明的區域,得到一系列一定時間間隔下示蹤粒子的位置,使用影像處理技術計算相同粒子的位移,得到當地流速,
流場中某一示蹤粒子在二維平面上運動,其在x、y兩個方向上的位移隨時間的變化為x(t)、y(t),是時間t的函式,那么,當兩次曝光時間間隔?t足夠小時,該示蹤粒子所在處的質點的二維流速可以表示如下公式:
式中:u與v是沿x方向與y方向的瞬時速度,?x/?t和?y/?t是沿x方向與y方向的平均速度, ?t是測量的時間間隔,
1.2 互相關理論
因為粒子小,所以很難從兩幅影像中分辨同一個粒子,也就無法獲得所需的相對位移,因此利用互相關分析理論,影像采集系統獲得的每一對影像都是從相同的空間位置上得到的,且曝光的時間間隔可以作為已知引數,流場中的示蹤粒子反射來自片光源的光線,每一粒子上反射的光強信號與其空間位置成單一映射,這就形成光強信號與空間位置的函式映射關系,使用互相關分析方法可以確定兩幅影像之間的對應關系,
在對采集影像進行分析時,首先需要明確一個概念 “判讀區” :它是指影像中一定位置取一定尺寸的方形圖,通過對判讀區進行信號處理,就可以獲取速度,假設系統在以及
這兩個時刻分別獲取圖1和圖2,在圖1和圖2中相同位置獲取兩個同樣尺寸大小的判讀區f(m,n)以及g(m,n),(m,n)表示 f與g分別在圖1與圖2中的相對位置,對f與g進行處理就可以獲得此判讀區對應位移s,
用傅立葉變換實作互相關分析,直接利用互相關函式的定義進行互相關函式的計算,計算量是非常巨大的,其一維的計算復雜性為O(N2),計算量會隨著序列長度的增大而急劇增長,為了提高運算效率,一般通過二維快速Fourier變換(FFT)在PIV技術中實作互相關函式的計算,
p(x,y)、q(x,y)與有如下公式:
在以上的公式中,![]() 表示互相關函式的最大值,i和j 表示互相關函式取最大值是相應的坐標,
表示互相關函式的最大值,i和j 表示互相關函式取最大值是相應的坐標,![]() 、
、![]() 、
、![]() 和
和![]() 分別表示互相關函式陣列中與
分別表示互相關函式陣列中與![]() 最鄰近的周圍四個網格點上的互相關函式的數值,上述公式類似于一種在影像處理演算法中通常采用的鄰域運算,即互相關函式峰值位置不但和本身有關,而且還受到其相鄰網格點的互相關函式數值的影響,
最鄰近的周圍四個網格點上的互相關函式的數值,上述公式類似于一種在影像處理演算法中通常采用的鄰域運算,即互相關函式峰值位置不但和本身有關,而且還受到其相鄰網格點的互相關函式數值的影響,
2 代碼實作
2.1 預處理
讀入影像,設定判斷視窗,初始化速度,
clc ; clear all;
I1 = imread('xxx');
I2 = imread('xxx');
[row,col]=size(I1);
wsz=32;%設定判斷視窗
stp=wsz/2;
cycl=floor((col-wsz)/stp);
cycw=floor((row-wsz)/stp);
velocity=zeros((cycw+1),(cycl+1),2);2.2 速度計算
根據每個磁區計算速度并保存
for m=1:1:(cycw+1)
for n=1:1:(cycl+1)
image1=I1((1+stp*(m-1)):(stp*(m-1)+wsz),(1+stp*(n-1)):(stp*(n-1)+wsz));
image2=I2((1+stp*(m-1)):(stp*(m-1)+wsz),(1+stp*(n-1)):(stp*(n-1)+wsz));
[x,y]=velo_calculate(image1,image2,stp); %計算粒子的u、v速度分量
velocity(m,n,1)=x; %將粒子的u、v速度分量分別順序存進velocity
velocity(m,n,2)=y;
end
end其中的velo_calculate函式如下,使用快速傅里葉變換和高斯擬合修正,
注意這里并沒有得到真正的速度,還需除以兩幅影像之間的時間差,因此這里默認兩幅影像的時間差為單位時間,但是實際中是遠小于單位時間的,后續除去即可,
function[x,y]=velo_calculate(i1,i2,st)
r = fftshift(ifft2(fft2(i1).*conj(fft2(i2))));%計算互相關度
[x,y]=find(r==max(max(r)));
try %高斯擬合修正
detax=(log(r(x-1,y))-log(r(x+1,y)))/(2*log(r(x-1,y))-4*log(r(x,y))+2*log(r(x+1,y)));
detay=(log(r(x,y-1))-log(r(x,y+1)))/(2*log(r(x,y-1))-4*log(r(x,y))+2*log(r(x,y+1)));
catch exception
detax=zeros(size(x));
detay=zeros(size(y));
end
x=x-st-1;
y=y-st-1;
d2=x.*x+y.*y;
[d2min,wh]=min(d2); %若互相關矩陣中有多個元素同為最小,則取位移量最小的那一個
x=x(wh)+detax(wh);
y=y(wh)+detay(wh);
temp=(-y);
y=x;
x=temp;
if (x^2+y^2)^0.5>8 %后處理1,Vector Validation,根據結果篩除過大的速度,速率上限選為8
x=0;
y=0;
end2.3 速度修正
velocity=velo_correction(velocity,cycw,cycl,3);%速度修正,3為修正次數其中,velo_correction函式如下:
function[velo]=velo_correction(v,cw,cl,t)
for ce=1:t %進行t次擬合修正速度
for m=2:1:cw
for n=2:1:cl
refu=(v((m-1),(n-1),1)+2*v((m-1),n,1)+v((m-1),(n+1),1)+2*v(m,(n-1),1)+2*v(m,(n+1),1)+v((m+1),(n-1),1)+2*v((m+1),n,1)+v((m+1),(n+1),1))/12;
refv=(v((m-1),(n-1),2)+2*v((m-1),n,2)+v((m-1),(n+1),2)+2*v(m,(n-1),2)+2*v(m,(n+1),2)+v((m+1),(n-1),2)+2*v((m+1),n,2)+v((m+1),(n+1),2))/12;
% refu=(velocity((m-1),(n-1),1)+velocity((m-1),n,1)+velocity((m-1),(n+1),1)+velocity(m,(n-1),1)+velocity(m,(n+1),1)+velocity((m+1),(n-1),1)+velocity((m+1),n,1)+velocity((m+1),(n+1),1))/8;
% refv=(velocity((m-1),(n-1),2)+velocity((m-1),n,2)+velocity((m-1),(n+1),2)+velocity(m,(n-1),2)+velocity(m,(n+1),2)+velocity((m+1),(n-1),2)+velocity((m+1),n,2)+velocity((m+1),(n+1),2))/8;
if abs(v(m,n,1)-refu)>(0.5*abs(refu))||abs(v(m,n,2)-refv)>(0.5*abs(refv)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
v(m,n,1)=refu;
v(m,n,2)=refv;
end
end
end
m=1;
for n=2:cl
refu=(v(m,(n-1),1)+v(m,(n+1),1)+v((m+1),(n-1),1)+v((m+1),n,1)+v((m+1),(n+1),1))/5;
refv=(v(m,(n-1),2)+v(m,(n+1),2)+v((m+1),(n-1),2)+v((m+1),n,2)+v((m+1),(n+1),2))/5;
if abs(v(m,n,1)-refu)>(0.5*abs(refu))||abs(v(m,n,2)-refv)>(0.5*abs(refv)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
v(m,n,1)=refu;
v(m,n,2)=refv;
end
end
m=cw+1;
for n=2:cl
refu=(v((m-1),(n-1),1)+v((m-1),n,1)+v((m-1),(n+1),1)+v(m,(n-1),1)+v(m,(n+1),1))/5;
refv=(v((m-1),(n-1),2)+v((m-1),n,2)+v((m-1),(n+1),2)+v(m,(n-1),2)+v(m,(n+1),2))/5;
if abs(v(m,n,1)-refu)>(0.5*abs(refu))||abs(v(m,n,2)-refv)>(0.5*abs(refv)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
v(m,n,1)=refu;
v(m,n,2)=refv;
end
end
n=1;
for m=2:cw
refu=(v((m-1),n,1)+v((m-1),(n+1),1)+v(m,(n+1),1)+v((m+1),n,1)+v((m+1),(n+1),1))/5;
refv=(v((m-1),n,2)+v((m-1),(n+1),2)+v(m,(n+1),2)+v((m+1),n,2)+v((m+1),(n+1),2))/5;
if abs(v(m,n,1)-refu)>(0.5*abs(refu))||abs(v(m,n,2)-refv)>(0.5*abs(refv)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
v(m,n,1)=refu;
v(m,n,2)=refv;
end
end
n=cl+1;
for m=2:cw
refu=(v((m-1),(n-1),1)+v((m-1),n,1)+v(m,(n-1),1)+v((m+1),(n-1),1)+v((m+1),n,1))/5;
refv=(v((m-1),(n-1),2)+v((m-1),n,2)+v(m,(n-1),2)+v((m+1),(n-1),2)+v((m+1),n,2))/5;
if abs(v(m,n,1)-refu)>(0.5*abs(refu))||abs(v(m,n,2)-refv)>(0.5*abs(refv)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
v(m,n,1)=refu;
v(m,n,2)=refv;
end
end
end
velo=v;
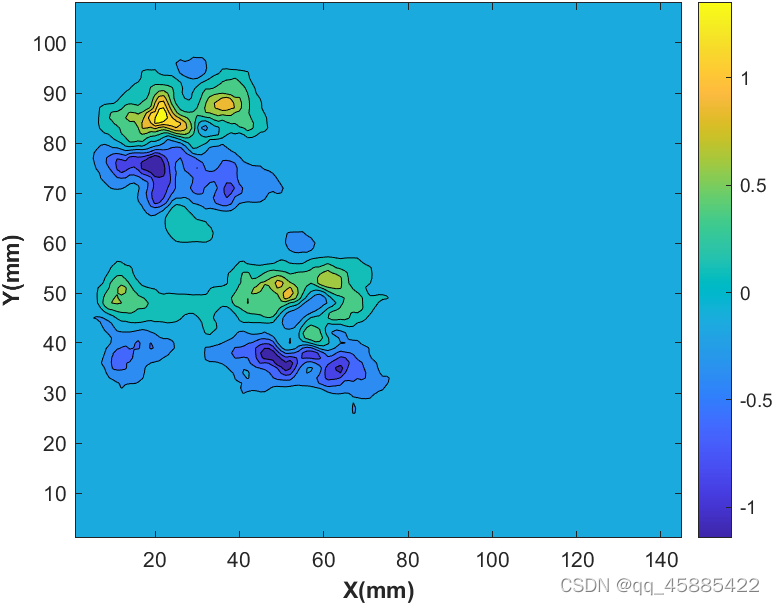
end2.4 計算渦量
根據渦量運算式,采用中心差分的方法計算渦量的大小,并把每個點的渦量大小與周圍八個點的渦量的平均值進行比較,誤差超過50%的點位,直接取平均值,渦量處理有多種方法,此方法處理效果不是很好,
vorticity=vortex_calculate(velocity,cycw,cycl);其中,vortex_calculate函式如下:
function[vor]=vortex_calculate(velocity_,cw,cl)
u=velocity_(:,:,1);
v=velocity_(:,:,2);
dv=zeros(cw+1,cl+1);
du=zeros(cw+1,cl+1);
vor=zeros(cw+1,cl+1);
for m=1:1:cw+1
for n=2:1:cl
dv(m,n)=(v(m,n+1)-v(m,n-1))/2;
end
dv(m,1)=(v(m,2)-v(m,1));
dv(m,cl+1)=v(m,cl+1)-v(m,cl);
end
for m=2:1:cw
for n=1:1:cl+1
du(m,n)=(u(m+1,n)-u(m-1,n))/2;
end
du(1,n)=(u(2,n)-u(1,n));
du(cw+1,n)=u(cw+1,n)-u(cw,n);
end
for m=1:1:cw+1
for n=1:1:cl+1
vor(m,n)=(dv(m,n)-du(m,n));
if abs(vor(m,n))<0.2||n>60
vor(m,n)=0;
end
end
end
vor=flipud(-vor);
for m=2:1:cw
for n=2:1:cl
refu=(vor((m-1),(n-1))+vor((m-1),n)+vor((m-1),(n+1))+vor(m,(n-1))+vor(m,(n+1))+vor((m+1),(n-1))+vor((m+1),n)+vor((m+1),(n+1)))/8;
if abs(vor(m,n)-refu)>(0.3*abs(refu)) %不合理標準選為任一方向速度與周圍的平均值相差超過50%
vor(m,n)=refu;
end
end
end
for m=1:1:cw+1
for n=1:1:cl+1
if abs(vor(m,n))<0.1||n>60
vor(m,n)=0;
end
end
end2.5 繪制影像
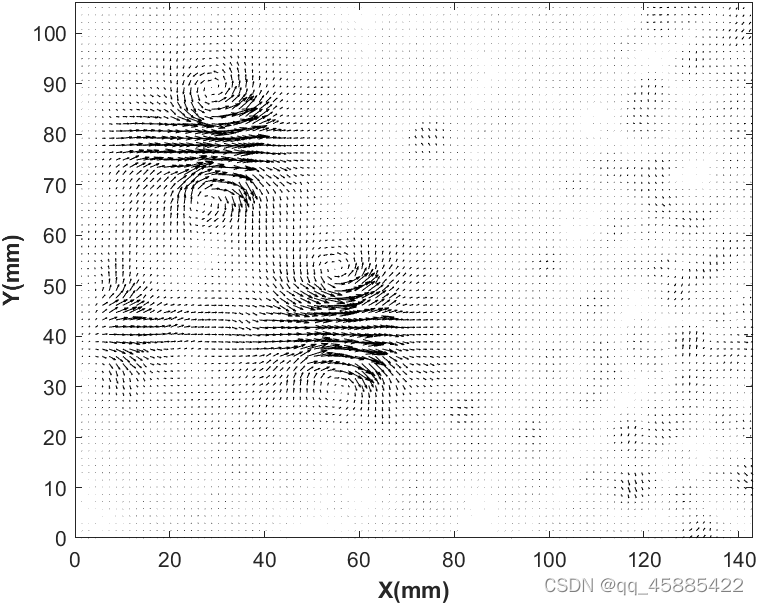
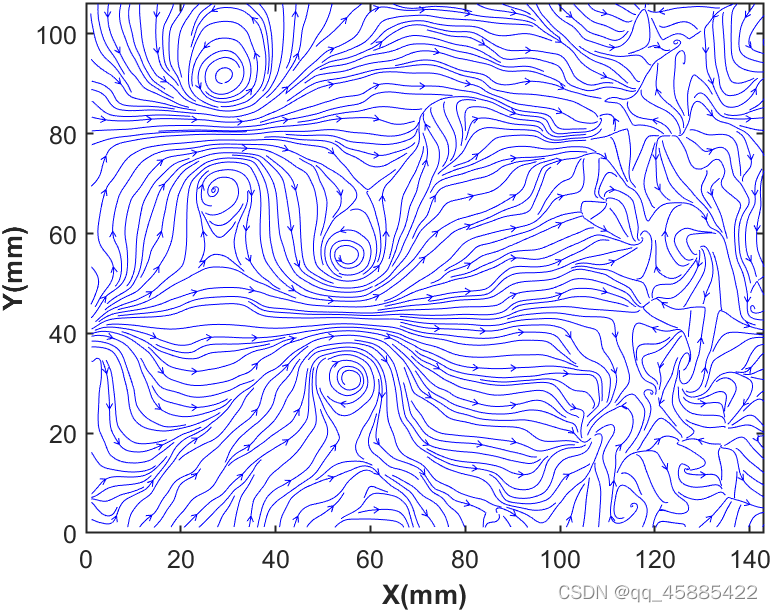
根據得到的速度和渦量繪制流場、流線和渦量圖,
%繪制流場
figure(1);
ax1=axes('linewidth',3, 'box', 'on', 'FontSize',12);
set(gcf,'color','white');
set(ax1,'YTick', []);
set(ax1,'XTick', []);
for m=1:1:(cycw+1)
for n=1:1:(cycl+1)
quiver((stp*n)*0.09,stp*(cycw-m+1)*0.09,velocity(m,n,1),velocity(m,n,2),'Color','k','MaxHeadSize',1,'AutoScaleFactor',1);
hold on;
end
end
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
axis([0 143 0 106])
% 繪制流線
figure(2);
ax1=axes('linewidth',1,'box','on','FontSize',12);
set(gcf,'color','white');
set(ax1,'YTick', [0:20:106]);
set(ax1,'XTick', [0:20:143]);
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
axis([0 143 0 106])
streamlines=flipud(imresize(velocity,1.456));
streamslice(streamlines(:,:,1),streamlines(:,:,2),5);
%繪制渦量
figure(3)
ax1=axes('linewidth',1,'box','on','FontSize',12);
set(gcf,'color','white');
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
F=imresize(vorticity,1.456);
contourf(F,10)
colorbar;
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');繪制得到的影像如下:
3 完整代碼
以下只列出主程式代碼,各呼叫函式已經在上部分中給出,
clc ; clear all;
I1 = imread('xxx');
I2 = imread('xxx');
[row,col]=size(I1);
wsz=32;
stp=wsz/2;
cycl=floor((col-wsz)/stp);
cycw=floor((row-wsz)/stp);
velocity=zeros((cycw+1),(cycl+1),2);
for m=1:1:(cycw+1)
for n=1:1:(cycl+1)
image1=I1((1+stp*(m-1)):(stp*(m-1)+wsz),(1+stp*(n-1)):(stp*(n-1)+wsz));
image2=I2((1+stp*(m-1)):(stp*(m-1)+wsz),(1+stp*(n-1)):(stp*(n-1)+wsz));
[x,y]=velo_calculate(image1,image2,stp); %計算粒子的u、v速度分量
velocity(m,n,1)=x; %將粒子的u、v速度分量分別順序存進velocity
velocity(m,n,2)=y;
end
end
velocity=velo_correction(velocity,cycw,cycl,3);%速度修正,3為修正次數
%繪制流場
figure(1);
ax1=axes('linewidth',3, 'box', 'on', 'FontSize',12);
set(gcf,'color','white');
set(ax1,'YTick', []);
set(ax1,'XTick', []);
for m=1:1:(cycw+1)
for n=1:1:(cycl+1)
quiver((stp*n)*0.09,stp*(cycw-m+1)*0.09,velocity(m,n,1),velocity(m,n,2),'Color','k','MaxHeadSize',1,'AutoScaleFactor',1);
hold on;
end
end
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
axis([0 143 0 106])
% 繪制流線
figure(2);
ax1=axes('linewidth',1,'box','on','FontSize',12);
set(gcf,'color','white');
set(ax1,'YTick', [0:20:106]);
set(ax1,'XTick', [0:20:143]);
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
axis([0 143 0 106])
streamlines=flipud(imresize(velocity,1.456));
streamslice(streamlines(:,:,1),streamlines(:,:,2),5);
%計算渦量
vorticity=vortex_calculate(velocity,cycw,cycl);
figure(3)
ax1=axes('linewidth',1,'box','on','FontSize',12);
set(gcf,'color','white');
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');
F=imresize(vorticity,1.456);
contourf(F,10)
colorbar;
xlabel('X(mm)','FontWeight','bold');
ylabel('Y(mm)','FontWeight','bold');轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/385450.html
標籤:其他
上一篇:實戰內容(13)- Invalid audio stream. Exactly one MP3 audio stream is required.