一、概述
大家都聽過《哈利波特》吧,在《哈利波特》的世界中,魔法物品很多,但是沒有任何一樣物品能像魔杖一樣重要,因為它與巫師建立起了一種難以言表的緊密聯系,大家看到魔法世界里的巫師們,輕輕揮動幾下他們的魔法棒,就可以施放各種各樣的魔法,是不是即驚嘆又羨慕,

今天給大家帶來一款家庭版的魔法棒,開發者們只要輕輕揮動它,就可以控制家里的智能設備,體驗一次當哈利波特的感覺,是不是特別神奇,它還可以充當探照小燈,比如東西掉到狹小又深的地方時,可以將身材修長苗條是魔法棒伸進去,點亮頂部的小燈,來尋找物品,
想擁有這樣的魔法棒嗎,一起來看看吧,
二、硬體設計
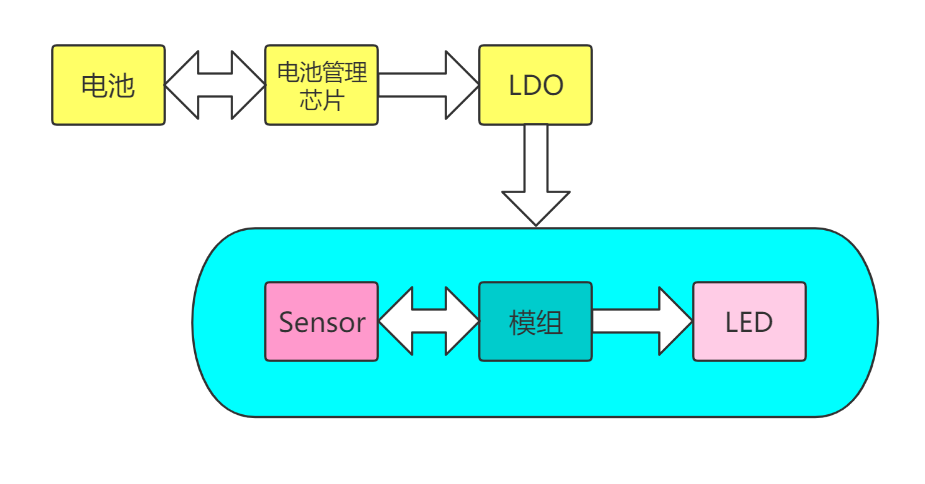
電路主要分為主控板和燈板兩部分,
主控板搭載鋰電池和充電管理系統,使魔法棒具備可回圈的持久續航能力,采用一顆高精度六軸傳感器,可以識別用戶手勢姿態,判斷用戶指令,還搭載涂鴉智能出品的通信模組,賦予魔法棒聯網的能力,可與手機APP通訊,實作設備端,手機端,云端三方資料通信,從而實作用戶通過揮動魔法棒控制智能設備,起到魔術一樣的神奇效果,
燈板可以根據開發者喜好自由發揮,添加各種顏色,各種規格的燈,使魔法棒在"施法"時顯的更加絢麗多彩,
整體硬體框圖如下:
2.1 主控板
點擊這里查看主控板完整原理圖
考慮到便捷環保和重復使用,魔法棒選擇3.7V鋰電池供電,電池的尺寸和容量可以根據自身需求選擇,原理圖中的U3為TP4056,是一顆鋰電池專用充放電芯片,
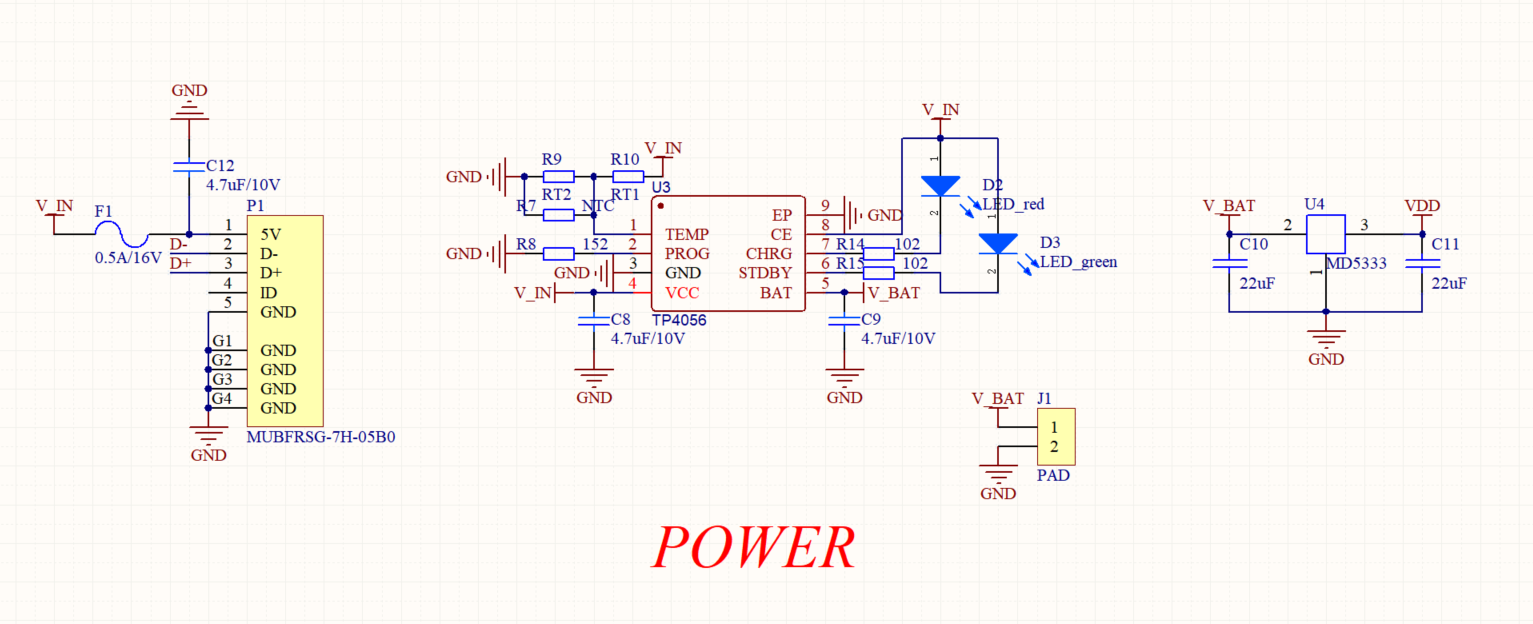
這是一款恒定電流/恒定電壓線性充電芯片,采用了內部 PMOSFET 架構,內置防倒充電路,芯片具有熱反饋功能,可對充電電流進行自動調節,以便在大功率操作或高環境溫度條件下對芯片溫度加以限制,充電電壓固定于4.2V,而充電電流可通過一個電阻器進行外部設定,當充電電流在達到最終浮充電壓之后降至設定值 1/10 時,TP4056 將自動終止充電回圈,
V_IN為USB輸入的5V電壓,V_BAT連接鋰電池的正極(鋰電池的負極記得連GND),CE腳是芯片使能端,只有CE腳高電平的時候,TP4056才會正常作業,
- STDBY腳是電池充電完成指示端,當電池充電完成時,該腳被內部開關拉到低電平,表示充電完成,除此之外,該管腳都將處于高阻態,
- CHRG腳是漏極開路輸出的充電狀態指示端,當充電器向電池充電時, 該管腳被內部開關拉到低電平,表示充電正在進行;否則該管腳處于高阻態,
? 因此,開發者可以在STDBY和CHRG腳分別加了綠色和紅色兩個LED,這樣,當鋰電池正在充電時,紅燈點亮,當充電完成,綠燈點亮,
- PROG腳是恒流充電電流設定和充電電流監測端,從 PROG 管腳連接一個外部電阻到地端可以對充電電流進行編程,在預充電階段,此管腳的電壓被調制在 0.1V;在恒流充電階段,此管腳的電壓被固定在 1V,在充電狀態的所有模式,測量該管腳的電壓都可以根據下面的公式來估算充電電流Ibat=1200*Vprog/Rprog,
為了防止大電流充電,芯片和電池溫度上升,開發者把充電最大電流設定為0.8A,根據公式可知,Rprog=1200*Vprog/Ibat,
其中Ibat取0.8A,Vprog取1V,計算得Rprog=1.5K歐姆,如果開發者想加大電流,在此基礎上適當減小Rprog電阻(原理圖中的R8)即可,
- TEMP腳是電池溫度檢測輸入端,將TEMP 管腳接到電池的 NTC 傳感器的輸出端,如果 TEMP 管腳的電壓小于輸入電壓的45%或者大于輸入電壓的 80%,意味著電池溫度過低或過高,則充電被暫停,如果 TEMP 直接接 GND,電池溫度檢測功能取消,其他充電功能正常
這里為了減少開發周期,開發者可以將R16或者R14焊0歐姆電阻,取消該功能,如果開發者希望啟用,可以聯系涂鴉智能,涂鴉智能會提供專業技術支持進行幫助,點擊這里查看TP4056資料手冊
U4是一顆低功耗型的LDO,型號是MD5333,它的作用將鋰電池輸出的3.6V電壓降壓到3.3V,由此給控制器,傳感器等設備供電,
MD5333最大的優勢在于它的低功耗,它的靜態漏電流只有1~2uA,可以大大減少魔法棒在待機情況下的功耗,從而保證魔法棒的續航時間,開發者也可以選擇其他型號的LDO芯片,但是靜態漏電流建議要在2uA以下哦,
2.1.1 控制器
控制核心依舊是開發者們所熟悉的涂鴉智能云模組,
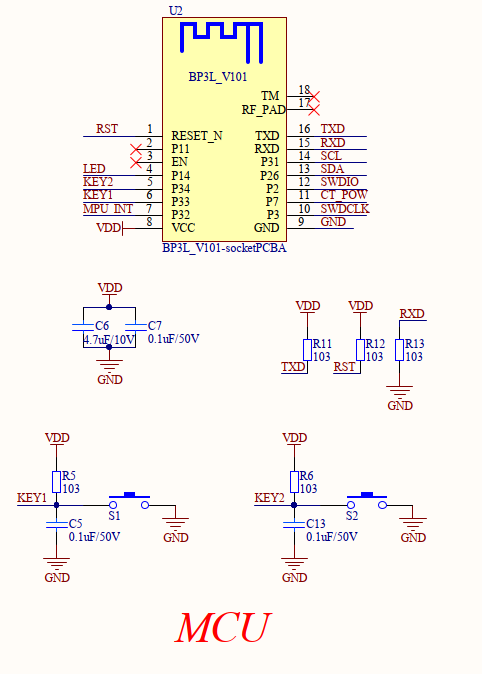
涂鴉有各種通信協議,各種尺寸規格,各種作業溫度,各種焊接方式的一系列超高性價比自研模組,開發者可根據自身的需求進行靈活選擇,本次的魔法棒,如果考慮產品化,涉及低功耗等要求,推薦開發者選擇低功耗藍牙模組或者低功耗Zigbee模組,
魔法棒會用到如下幾個控制引腳用于控制外設,開發者在設計電路的時候需要注意一下:
| 引腳名稱 | 引腳功能 |
|---|---|
| LED | LED燈控制引腳,用于控制LED燈亮滅或閃爍 |
| KEY | 按鍵引腳,用于喚醒涂鴉云模組,退出低功耗模式 |
| MPU_INT | MPU6050資料就緒引腳,當資料就緒時會產生高電平以提示主控來讀取資料 |
| SCL | MPU6050 IIC介面的時鐘引腳 |
| SDA | MPU6050 IIC介面的資料引腳 |
| CT_POW | MPU6050 電源控制引腳 |
2.1.2 傳感器
如何識別用戶揮手的手勢姿態資訊呢?這里就需要一顆姿態采集傳感器,本方案采用的是MPU6050,
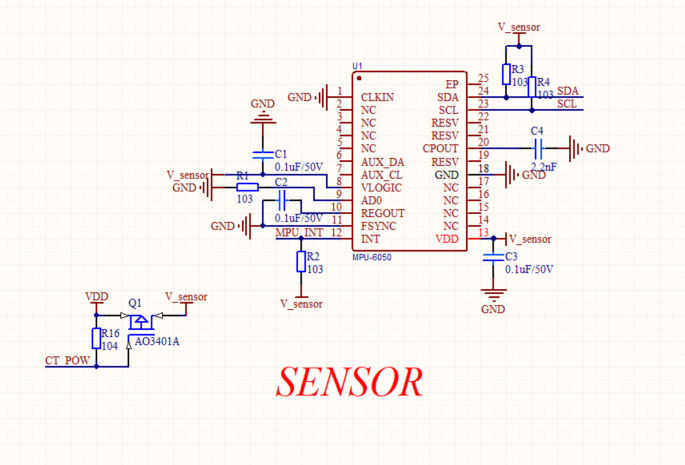
它是InvenSense公司推出的全球首個整合性6軸運動處理器件,內帶3軸陀螺儀和3軸加速度傳感器,并且含有一個輔助IIC介面,可用于連接外部磁力傳感器,利用數字運動處理器DMP硬體加速引擎,通過主IIC介面,可以向應用端輸出完整的9軸姿態融合演算資料,
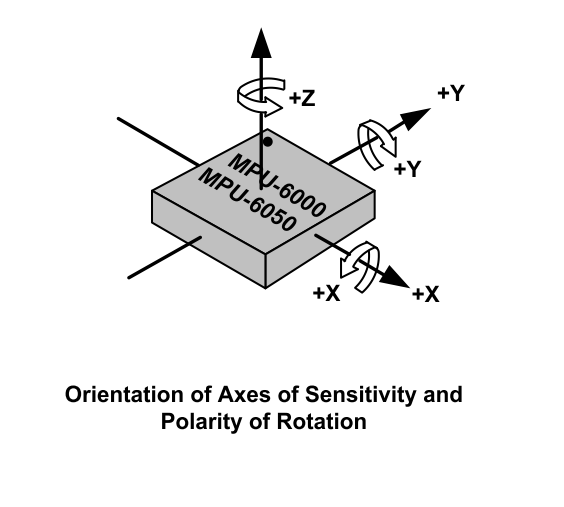
MPU6050 對陀螺儀和加速度計分別用了三個16 位的ADC(0~65535),將其測量的模擬量轉化為可輸出的數字量,為了精確跟蹤快速和慢速的運動,傳感器的測量范圍都是用戶可控的,
MPU6050三個獨立的振動MEMS速率陀螺儀,可檢測旋轉角度X軸,Y軸和Z軸, 當陀螺儀圍繞任何感應軸旋轉時,科里奧利效應就會產生電容式傳感器檢測到的振動, 所得到的信號被放大,解調和濾波產生與角速度成比例的電壓, 該電壓使用單獨的片內數字化16位模數轉換器(ADC)對每個軸進行采樣, 陀螺儀傳感器可以全面范圍的被數字編程為每秒±250,±500,±1000或±2000度(dps), ADC樣本速率可以從每秒8,000個采樣點編程到每秒3.9個采樣點,并且可由用戶選擇低通濾波器可實作廣泛的截止頻率,
MPU6050的3軸加速度計為每個軸使用單獨的檢測質量, 加速沿著一條特定軸在相應的檢測質量上引起位移,并且電容式傳感器檢測到該位移位移有差別,MPU6050的架構降低了加速度計的敏感度制造變化以及熱漂移, 當設備放置在平坦的表面上時,將進行測量在X和Y軸上為 0g,在Z軸上為+ 1g, 加速度計的比例因子在工廠進行校準并且在名義上與電源電壓無關, 每個傳感器都有一個專用ADC來提供數字輸出, 數字輸出的滿量程范圍可以調整到±2g,±4g,±8g或±16g,
點擊這里查看MPU6050資料手冊
傳感器的引腳功能說明如下:
| 引腳編號 | 引腳名稱 | 說明 |
|---|---|---|
| 1 | CLKIN | 可選的外部時鐘輸入,如果不用則接GND |
| 6 | AUX_DA | I2C主串行資料,用于外接傳感器 |
| 7 | AUX_CL | I2C主串行時鐘,用于外接傳感器 |
| 8 | VLOGIC | 數字I/O供電電壓 |
| 9 | AD0 | I2C Slave 地址 LSB |
| 10 | REGOUT | 校準濾波電容連線 |
| 11 | FSYNC | 幀同步數字輸入 |
| 12 | INT | 中斷數字輸出(推挽或開漏) |
| 13 | VDD | 電源電壓及數字I/O供電電壓 |
| 18 | GND | 電源地 |
| 19、20、21 | RESV | 預留,不接 |
| 20 | CPOUT | 電荷泵電容連線 |
| 23 | SCL | I2C串行時鐘SCL |
| 24 | SDA | I2C串行資料SDA |
| 2、3、4、5、14、15、16、17 | NC | 懸空 |
2.2 功能板
這部分的電路,開發者可以任意發揮,給魔法棒附加額外的創意功能,展現各種天馬行空的奇思妙想,簡單的,比如加個燈,讓魔法棒具備探照的功能,也可以加蜂鳴器,當按鍵按下,可以制造美妙的音樂,這里以燈為例,開發者可以參考下面原理圖,
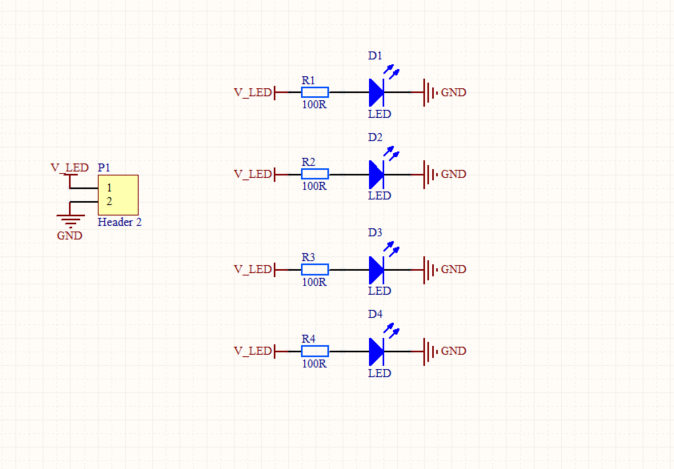
設計時需要注意一下幾點:
- 所選LED燈的壓降不能超過供電電壓,
- 需要考慮LED允許的最大持續電流,選擇合作阻值的限流電阻,
- 注意限流電阻的功率,選擇合適封裝,0603為1/10W,0805為1/8W,1206為1/4W,
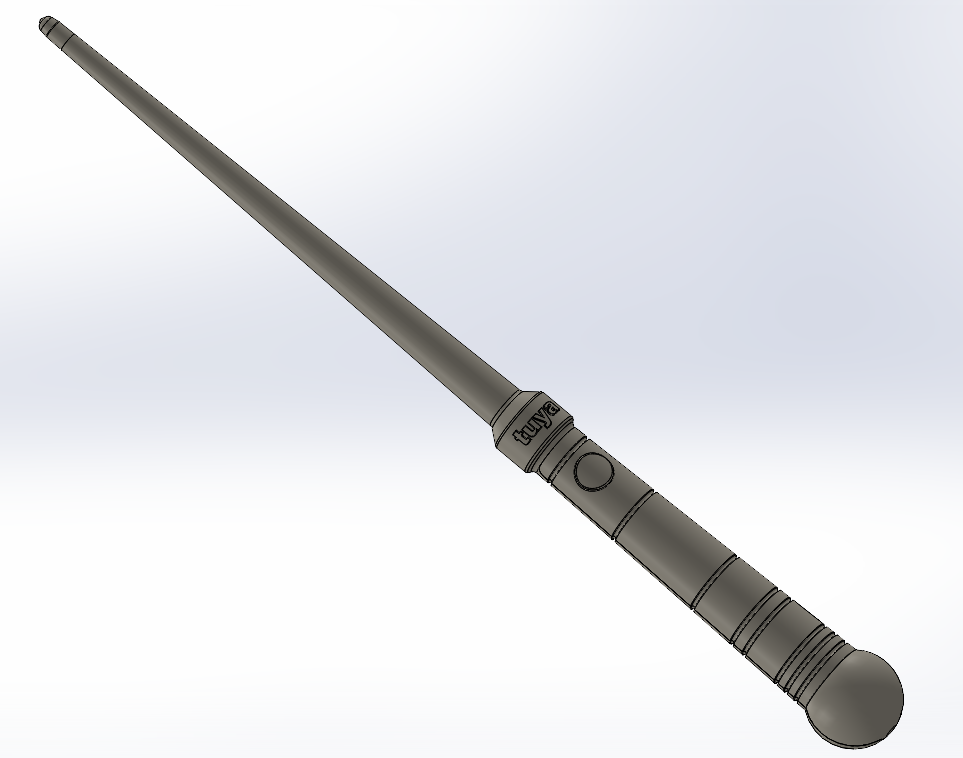
三、整機搭建
開發者發揮自己的創意,綜合考慮使用情況,調整PCB外形和結構尺寸,制作出一根屬于自己的魔法棒,
點擊這里查看主控板完整PCB

外形結構

整體效果
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/392250.html
標籤:其他