目錄
- 1 引言
- 2 矩陣的作用
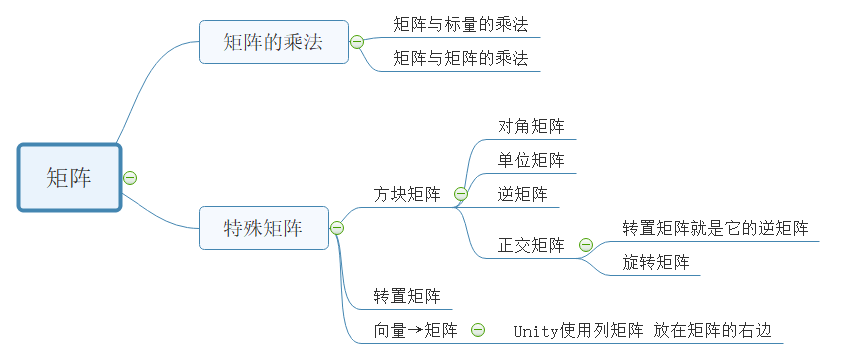
- 3 矩陣的乘法
- 3.1 矩陣與標量的乘法
- 3.2 矩陣與矩陣的乘法
- 4 特殊矩陣
- 4.1 方塊矩陣
- 4.1.1 對角矩陣
- 4.1.2 單位矩陣
- 4.2 轉置矩陣
- 4.3 逆矩陣
- 4.4 正交矩陣
- 4.4 列矩陣
1 引言
大學學線性代數的時候簡直是一頭霧水,覺得太抽象了,數學家們怎么整出這么難以理解的東西,一學期學完,考試考完,然后就徹底把線性代數給遺忘了,但是現在在做Unity3D嘛,不可避免的要和矩陣打交道,由于每次用到一些矩陣的性質時,自己都得去翻翻書,為了節省時間,這里把自己容易遺忘的知識點給記錄一下并且把之前沒有徹底理解的問題給梳理一下,
2 矩陣的作用
我所理解的矩陣其實就是一個工具,用矩陣這個工具可以求解線性方程組、將一個點從一個坐標系變換到另一個坐標系或者移動到另外一個位置,但是我們為什么需要用到這個工具?因為它特別方便,比如我們再三維空間中,只需要一個4×4的矩陣,就可以把縮放、旋轉、平移這些變換全部表示完,如果不使用矩陣(也不使用四元數),要完成這些變換該有多難,可以說是簡直無從下手,
3 矩陣的乘法
3.1 矩陣與標量的乘法
矩陣與標量相乘就是將矩陣中的各個元素與標量相乘即可,舉個例子:

3.2 矩陣與矩陣的乘法
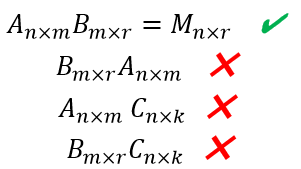
需要注意并不是任何兩個矩陣都可以相乘,第一個矩陣的列數必須要等于第二個矩陣的行數,這兩個矩陣才能相乘,
比如有矩陣
A
\textbf{A}
An×m、
B
\textbf{B}
Bm×r、
C
\textbf{C}
Cn×k,則只有
A
\textbf{A}
A與
B
\textbf{B}
B才可以相乘,
A
\textbf{A}
A與
C
\textbf{C}
C是不可以相乘的,
A
\textbf{A}
A與
B
\textbf{B}
B相乘后會得到一個新的矩陣
M
\textbf{M}
Mn×r,
新矩陣
M
\textbf{M}
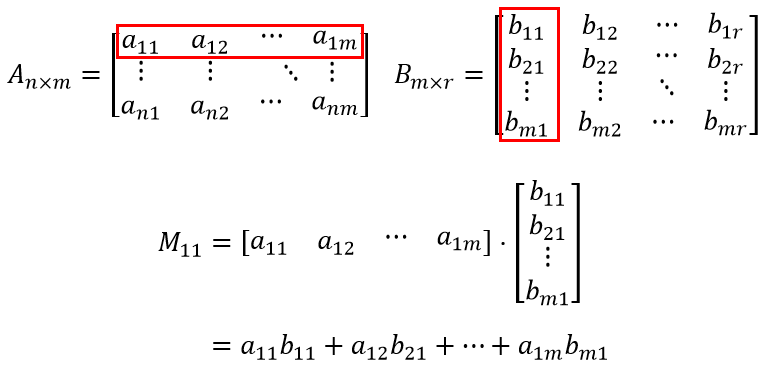
Mn×r中的各個元素的值是多少呢?
第i行第j列的元素
M
\textbf{M}
Mij=
A
\textbf{A}
A的第i行與
B
\textbf{B}
B的第j列的點積,
如
M
\textbf{M}
M11的計算方式如下:
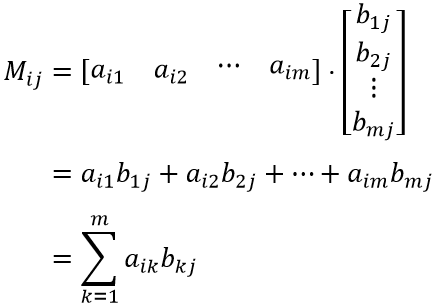
通用的計算公式如下:
矩陣與矩陣的乘法有以下兩個性質:
①一般情況下,矩陣的乘法不滿足交換律,
(下面會看到單位矩陣與其他矩陣的乘法和矩陣與其逆矩陣的乘法是滿足交換律的)
①矩陣的乘法滿足結合律,
結合律可以推導到更多矩陣的相乘,如:

矩陣與矩陣的乘法有什么用?用處非常多,不過在Unity3D開發中只用到它變換的功能,
我們常常將一個向量或者一個點(齊次坐標下)與一個4×4的矩陣相乘,從而得到經過各種變換(平移、旋轉、縮放等)后的向量或點,比如一個點乘以平移矩陣就得到平移后的點,乘以一個旋轉矩陣就得到旋轉后的點,
4 特殊矩陣
4.1 方塊矩陣
簡稱方陣,也即行數=列數的矩陣,
比如3×3的矩陣、4×4的矩陣,我們在編程程序中,用得最多的也是這兩個矩陣,
4.1.1 對角矩陣
對角矩陣是方陣中的一種特殊的矩陣,它的特點是除了對角元素外的所有元素都為0,舉個例子:

4.1.2 單位矩陣
單位矩陣又是對角矩陣中的一種特殊矩陣,其特點是對角元素全部為1,
英文為identity matrix,所以一般用字母
I
\textbf{I}
I表示,
舉個例子:

為什么單獨把單位矩陣提出來,因為它有個特殊的性質,就是任何矩陣和它相乘的結果都還是原來的矩陣,并且與單位矩陣的相乘是滿足交換律的(注意:普通的矩陣相乘是不滿足的),
4.2 轉置矩陣
把一個矩陣
M
\textbf{M}
M進行轉置操作就得到了該矩陣的轉置矩陣,記作
M
\textbf{M}
MT(轉置的英文為transpose,所以轉置一般用T來表示),
什么是轉置操作呢?其實就是把原矩陣的行變為列,
舉個例子:
轉置矩陣的性質有兩個:
①轉置矩陣的轉置等于原矩陣,
②
AB
\textbf{AB}
AB的轉置矩陣等于
B
\textbf{B}
B的轉置矩陣與
A
\textbf{A}
A的轉置矩陣的積,

4.3 逆矩陣
我們把矩陣
M
\textbf{M}
M的逆矩陣記做
M
\textbf{M}
M-1,
兩者滿足條件:矩陣
M
\textbf{M}
M與其逆矩陣
M
\textbf{M}
M-1的乘積為單位矩陣,

需要注意的:不是所有矩陣都有逆矩陣,只有方陣才有逆矩陣,一個矩陣擁有逆矩陣的充要條件是其行列式不等于0,
如果一個矩陣有逆矩陣,我們就說這個矩陣是可逆的或者是非奇異的;如果一個矩陣沒有逆矩陣,我們就說此矩陣是不可逆的,
逆矩陣有幾個重要的性質:
①逆矩陣的逆矩陣是原矩陣本身,
(這一點和轉置矩陣相同)
②單位矩陣的逆矩陣是其本身,
③轉置矩陣的逆矩陣等于逆矩陣的轉置,

④
AB
\textbf{AB}
AB的逆矩陣等于
B
\textbf{B}
B的逆矩陣與
A
\textbf{A}
A的逆矩陣的積,
(這一點也與轉置矩陣是相同的)

逆矩陣有什么用?在坐標變換程序中中,我們可以用它來還原我們所作的變換,
比如我們已知區域坐標上的一個點A,并且已知該區域坐標到世界坐標的變換矩陣
M
\textbf{M}
Mlocal2world,那么我們可以算出點A在世界坐標系中的表示為
B
\textbf{B}
B=
M
\textbf{M}
Mlocal2world
A
\textbf{A}
A(需要注意的是Unity中向量或點與變換矩陣相乘時,一般將向量或點放在矩陣的右側,也即將向量或點寫做列向量的形式,后面會專門闡述這一點),
現在,我們把條件改一下,只知道點A在世界坐標系中的表示為
B
\textbf{B}
B,以及區域坐標到世界坐標的變換矩陣
M
\textbf{M}
Mlocal2world,那么如何求到區域坐標系中點A的值呢?見下圖,
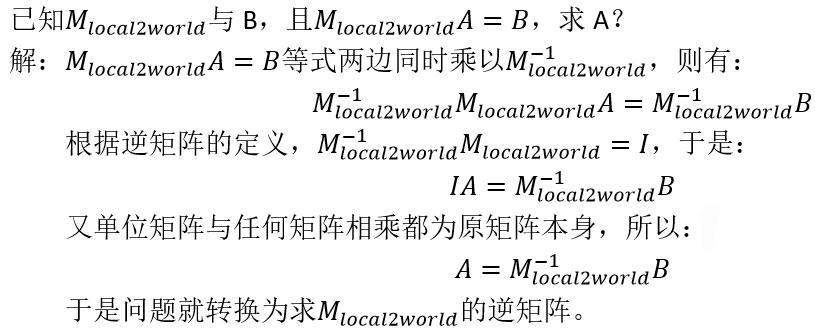
根據上面的推導,我們可以看出逆矩陣的作用其實就是還原變換或者說反變換,
但是上面的推導還有個問題,一個矩陣的逆矩陣該怎么求?逆矩陣的求解是非常非常復雜的程序,矩陣的維數越高,求解難度和運算量越大(所以在Unity開發程序中,我們一般不會直接求解逆矩陣,而是通過構建下一節將講到的正交矩陣來間接求到逆矩陣),所以具體怎么求逆矩陣這里就不再說了,感興趣的同學可以去查一查,慶幸的是Unity已經幫我們封裝好求解逆矩陣的方法,
比如我們常用的Matrix4×4矩陣,直接使用它的inverse屬性就可以得到其逆矩陣,
Matrix4x4 matrixLocal2World = transform.localToWorldMatrix;
// 下面這句等價于matrixWorld2Local = transform.worldToLocalMatrix
Matrix4x4 matrixWorld2Local = matrixLocal2World.inverse;
4.4 正交矩陣
正交矩陣是一種非常非常特殊的矩陣,它的定義如下:

用文字描述就是,一個矩陣與它的轉置矩陣的積為單位矩陣,我們就說這個矩陣是正交矩陣,
再結合逆矩陣的定義:
我們可以得出一個非常非常重要的性質,即正交矩陣的逆矩陣其實就是它的轉置矩陣,
我們上一節說過,一個矩陣的逆矩陣非常難求、計算量特別大,但如果一個變換矩陣恰好是正交矩陣,那它的逆矩陣直接使用其轉置矩陣即可,計算轉置矩陣的速度比計算逆矩陣的速度可快多了,
那么,怎么判斷一個矩陣是否是正交矩陣呢?
根據定義,我們可以知道正交矩陣一定是一個方陣,
那么我們假設
M
\textbf{M}
M是一個3×3的矩陣,推導程序如下圖:
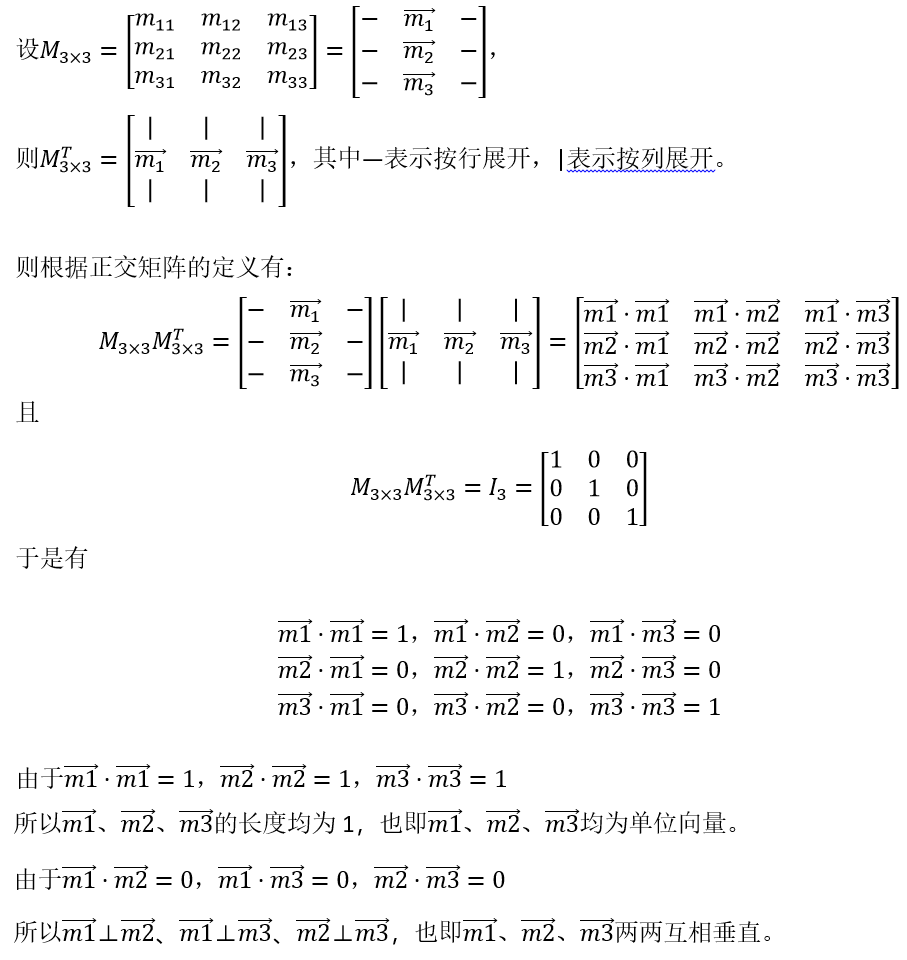
上面這個推導程序可以推導到更多維的正交矩陣,
也就是說,一個矩陣是正交矩陣的充要條件是首先它是一個方陣并且它的每一行均為單位向量,且各行互相垂直(點積為0),
我們為什么要專門討論正交矩陣?上面已經說了,正交矩陣可以非常快速的求到它的逆矩陣,后面的部分我們將會看到旋轉矩陣其實就是一個正交矩陣,所以求旋轉的逆變換程序是非常非常快速的,
根據上面的結論,我們很容易就能知道由標準正交基(長度為1的坐標系的x、y、z軸向量)構成的矩陣其實就是正交矩陣,我們后面在將一個坐標系中的點變換到另一個坐標系的時候,將會使用到這個知識點,
4.4 列矩陣
我們知道一個向量或者一個點寫作矩陣可以有兩種方式,一種是行矩陣,一種是列矩陣,如下:
對于同樣一個3×3的變換矩陣
M
\textbf{M}
M3×3,將向量或點寫作行矩陣或者列矩陣得到的結果將會是完全不同的,
舉個例子:
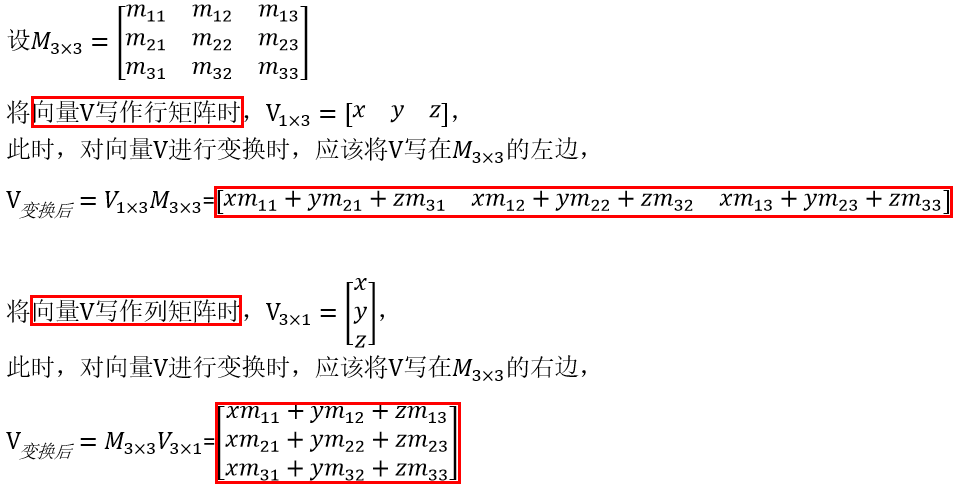
可以看到,向量或點寫成行矩陣變換后的結果與寫成列矩陣變換后的結果相比,不僅僅是行列矩陣的的區別,更重要的是里面的元素也是完全不同的,所以選擇那一種書寫方式就特別重要了,
在Unity3D中,選擇的是將向量或點寫成列矩陣的形式,
也就是說,在對向量或點進行變換時,應該將向量或點寫在變換矩陣的右邊,
我們以后不論是在寫業務邏輯或者寫Shader的程序中,如果需要進行坐標變換,一定要記住是將向量或點寫在變換矩陣的右邊,
舉個例子:

可以看到,將向量或點寫在變換矩陣的左邊時,直接編譯都不允許,
有同學可能會有疑問,上面例子中的pos不是只有3個元素嗎,怎么能夠與一個4×4的矩陣相乘?
上面其實我們沒有講到齊次坐標系,齊次坐標系沒什么特別的,就是比普通的xyz坐標系多了一個維度w(因為3×3的矩陣無法表示平移變換,而4×4的變換矩陣可以表示所有變換,所以我們一般使用4×4的變換矩陣,為此我們也需要將向量或點擴充到4維),
當一個向量寫成齊次坐標時,其w分量=0;當一個點寫成齊次坐標時,其w分量=1,
上面的代碼中,Unity內部自動將我們的pos轉換為齊次坐標了,最后一個元素強制設定為了0(所以需要注意的是,上面的代碼其實是將pos當成一個向量而不是點來計算的),
本來我想把矩陣的東西放在同一篇文章的,但是后來發現有點多,所以還是拆分成幾篇文章了,下一篇我們講講平移、旋轉、縮放矩陣是怎么推匯出來的,
博主個人博客本文鏈接,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/395259.html
標籤:其他
上一篇:單詞接龍C++
下一篇:擼起袖子加油干