目前國內無人機巡檢方案基本均采用“點對點”的巡檢模式,即采用多旋翼無人機加地面飛手遙控的模式。硬體上一般由無人機加地面車載終端組成孤立的節點。巡檢的時間規劃及路徑規劃需臨時決策,采集到的資料存盤在封閉的本地設備之中。
上述解決方案經過實際落地運行一段時間后,一定程度上解決了巡檢的一些需求。但是經過實際市場反饋上述方案仍然存在三大痛點:
(1)巡檢的控制調度程序過于遲緩,對于突發狀況反應速度太慢;
目前的無人機巡檢方案大多是點對點模式,為每臺無人機配置一個地面終端,每臺無人機終端各自獨立,由地面的飛手進行任務的調度與決策。這種方法最大問題在于獨立的任務缺乏一個集中的決策指令與調度控制,導致常常在巡檢中出現群龍無首的混亂局面。
(2)巡檢的范圍依舊受限,覆寫面積不夠;
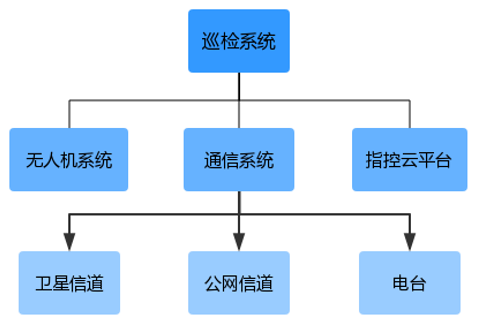
目前的無人機巡檢方案大多是使用旋翼式無人機加地面無人機終端的組合模式。受通信體制的限制,地面通信網路(如4G、WiFi等)無法適用于無人機測控領域。用于無人機測控的信道模式有衛星通信模式和電臺通信模式。市場上大多數無人機都采用電臺通信模式,無人機通過無線電臺與控制臺連接,其缺點是通信距離受限,一般不超過30公里,不能滿足中遠距離無人機的測控。少部分無人機采用衛星通信模式,無人機攜帶衛星終端,通過衛星信道直接連接控制臺,其缺點是需要無人機本身攜帶衛星終端,成本高昂。另外,大部分衛星終端體積大、重量大,需占用無人機的有限載荷量;極少數衛星終端雖然體積較小,但是其碼速率低,不能滿足圖傳需求。
(3)資料的利用效率十分低,沒有可靠的資料分析結果支撐。
目前的無人機巡檢方案采集到的資料一般都會存盤在封閉的地面終端中。事后如果有進行巡檢復盤或者錄像回看的需求,由于資料沒有進行統一的存盤,程序往往十分繁瑣。而且目前沒有有效的資料分析方案。
為解決過去無人機巡檢所存在上述問題,北京信成未來科技有限公司研發成功了國內首款適用于大范圍巡檢業務的中控式無人機巡檢系統,可以完美解決以上提出的問題,極大程度提升巡檢的作業質量和作業效率,最大程度節省巡檢的成本。增強對系統整體的控制權,縮短發生突發情況時的回應時間,提供最大的安全保障。對采集到的資料進行系統的管理與分析,提供強力的資料保障基礎。
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/40545.html
標籤:網絡維護與管理
上一篇:Laravel開發-laravel-voipinnovations 下載
下一篇:C語言程式設計