前言
總結一下視頻監控的資料集,用于目標檢測、跟蹤,持續跟新中..........,
一、UA-DETRAC 資料集
UA-DETRAC是一個具有挑戰性的真實世界多目標檢測和多目標跟蹤基準,該資料集包括在中國北京和天津的24個不同地點使用Cannon EOS 550D相機拍攝的10小時視頻,視頻以每秒25幀(fps)的速度錄制,解析度為960×540像素,UA-DETRAC資料集中有超過14萬個幀,手動注釋了8250個車輛,總共有121萬個標記的物件邊界框,官方還對目標檢測和多目標跟蹤中的最新方法以及本網站中詳述的評估指標進行基準測驗,

官網地址:
The UA-DETRAC Benchmark Suite![]() http://detrac-db.rit.albany.edu/
http://detrac-db.rit.albany.edu/
論文地址:
https://arxiv.org/pdf/1511.04136.pdf![]() https://arxiv.org/pdf/1511.04136.pdf使用車輛類別、天氣、規模、遮擋率和截斷率等屬性分析了目標檢測和跟蹤演算法的性能,
https://arxiv.org/pdf/1511.04136.pdf使用車輛類別、天氣、規模、遮擋率和截斷率等屬性分析了目標檢測和跟蹤演算法的性能,
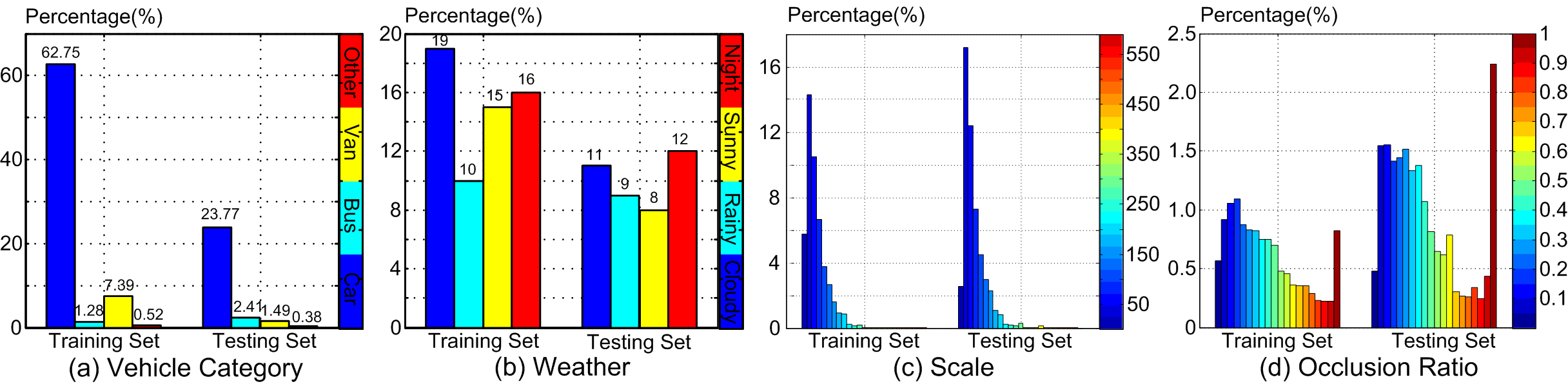
- 車輛類別 我們將車輛分為四類,即轎車、公共汽車、面包車和其他,
- 天氣 我們考慮四類天氣條件,即多云、夜間、晴天和雨天,
- 比例 我們將帶注釋車輛的比例定義為其面積的平方根(以像素為單位),我們將車輛分為三個等級:小型(0-50 像素)、中型(50-150 像素)和大型(超過 150 像素),
- 遮擋率 我們使用車輛邊界框被遮擋的比例來定義遮擋程度,我們將遮擋程度分為三類:無遮擋、部分遮擋和重度遮擋,具體來說,如果車輛的遮擋庋櫞 1%-50% 之間,我們定義為部分遮擋,如果遮擋率大于 50%,我們定義為重遮擋,
- 截斷率 截斷率表示車輛部件在框架外的程度,用于訓練樣本選擇,
二、MOT Challenge 資料集
MOT Challenge 是應用在多目標跟蹤中最常見的資料集,它專門用于行人跟蹤的場景,這些資料集目前已公開提供,對于每個資料集都提供了訓練資料和測驗資料,其中訓練資料提供了目標檢測結果和真實的跟蹤結果,而測驗資料只提供目標檢測的結果,
常截至目前,MOT Challenge 資料集包含了MOT15,MOT16/MOT17,MOT20等子資料集,
MOT Challenge![]() https://motchallenge.net/MOT15 資料集部分視頻序列實體:
https://motchallenge.net/MOT15 資料集部分視頻序列實體:

MOT15 子資料集是 MOT Challenge 資料集上第一代資料,它包括 2D MOT15資料和 3D MOT15 資料,其中 2D MOT15 資料一共包含了 22 段視頻序列(其中11 段視頻作為訓練使用,另外 11 段視頻作為測驗使用),另外 2D MOT15 子資料集使用了 ACF 檢測器識別視頻序列中的目標來提供公共的檢測結果,
MOT16/MOT17 子資料集中行人密度較高,因此該資料集也更具挑戰性,這兩個資料集包含了相同的 14 段視頻序列(其中 7 段視頻作為訓練使用,另外 7 段視頻作為測驗使用),
MOT16 子資料集使用了 DPM 檢測器作為公開檢測器,而 MOT17 子資料集則提供了三組不同的目標檢測(Faster R-CNN,DPM以及 SDP)結果,
MOT20 資料集部分序列實體:

MOT20 子資料集的場景極其復雜,行人密度極高,更加考驗多目標跟蹤器的性能,該資料集一共包含 8 段視頻序列,使用了 Faster R-CNN 作為檢測器來提供公開檢測結果,MOT20 資料集部分序列如上圖所示,可以看到場景當中的人口密度極大,
參考文章:https://blog.csdn.net/weixin_44936889/article/details/107029111
參考文獻:面向復雜場景的多目標跟蹤演算法研究.胡玉杰.電子科技大學.
目前只找到兩個比較好的資料集,后面如果新的發現會持續跟新的,歡迎交流~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/423157.html
標籤:AI
下一篇:影像處理(九)-圖片和陣列的轉換