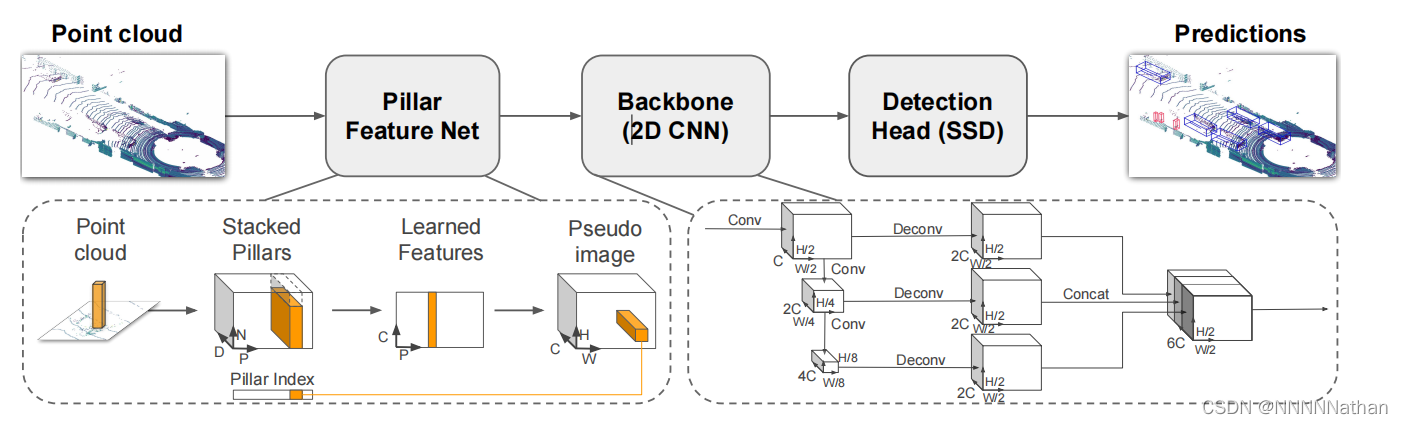
PointPillars是一個來自工業界的模型,整體思想基于圖片的處理框架,直接將點云從俯視圖的視角劃分為一個個的Pillar(立方柱體),從而構成了類似圖片的資料,然后在使用2D的檢測框架進行特征提取和密集的框預測得到檢測框,從而使得該模型在速度和精度都達到了一個很好的平衡,
PointPillars網路結構總覽:
網路速度精度對比:
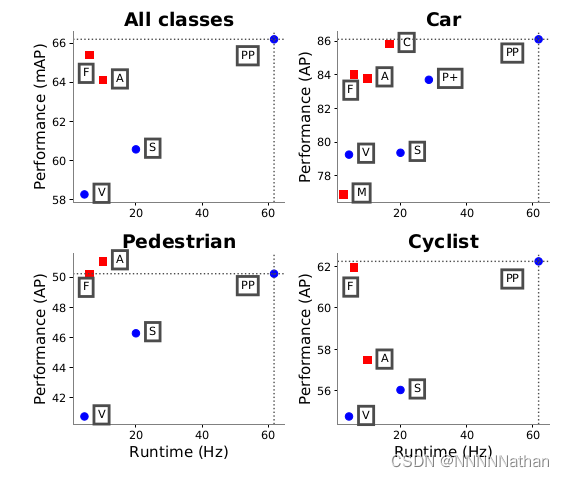
注:(PP代表pointpillars,M代表MV3D, A代表AVOD,C代表ContFuse,V代表VoxelNet,
F代表Frustum Pointnet,S代表SECOND ,P+代表PIXOR++)
本文將會以OpenPCDet的代碼基礎,詳細決議PointPillars的每一行代碼實作以及原因,
讀者可以下載OpenPCDet后根據文章進行閱讀和理解,
由于本人才疏學淺,決議中難免會出現不足之處,歡迎指正、討論,有好的建議或意見都可以在評論區留言,謝謝大家!
PointPillars的論文地址為:
https://arxiv.org/pdf/1812.05784.pdf
決議參考代碼:
https://github.com/open-mmlab/OpenPCDet
一 : 綜述
3D檢測演算法通常有以下幾種形式:
(1)將點云資料劃納入一個個體素(Voxel)中,構成規則的、密集分布的體素集,如有VoxelNet和SECOND,
(2)從前視和俯視角度對點云資料進行投影映射處理,獲得一個個偽圖片的資料,常見的模型有MV3D和AVOD,
(3)直接將點云資料映射到鳥瞰圖后,再直接使用2D的檢測框架的處理方法進行特征提取和RPN,實作3D的檢測,如PIXOR、本文的主角pointpillar,
(4)使用pointnet直接從點云中對資料進行特征提取后獲取proposals,然后根據獲取的proposals進行微調,如Pointrcnn
二 : PP網路點云資料處理
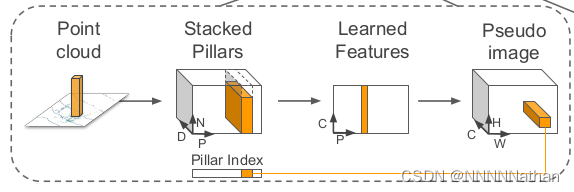
這里的處理程序直接將3D的點云資訊直接從以俯視圖的形式進行獲取,在點云中假設有N*3個點的資訊,所有的這些點都在kitti lidar坐標系xyz中(單位是米,其中x向前,y向左,z向上),所有的這些點都會分配到均等大小的x-y平面的立方柱體中,這個立方柱就被稱為pillar,如下圖所示
左相機前視圖

點云俯視圖 將點云分布到的均勻的立方柱體中
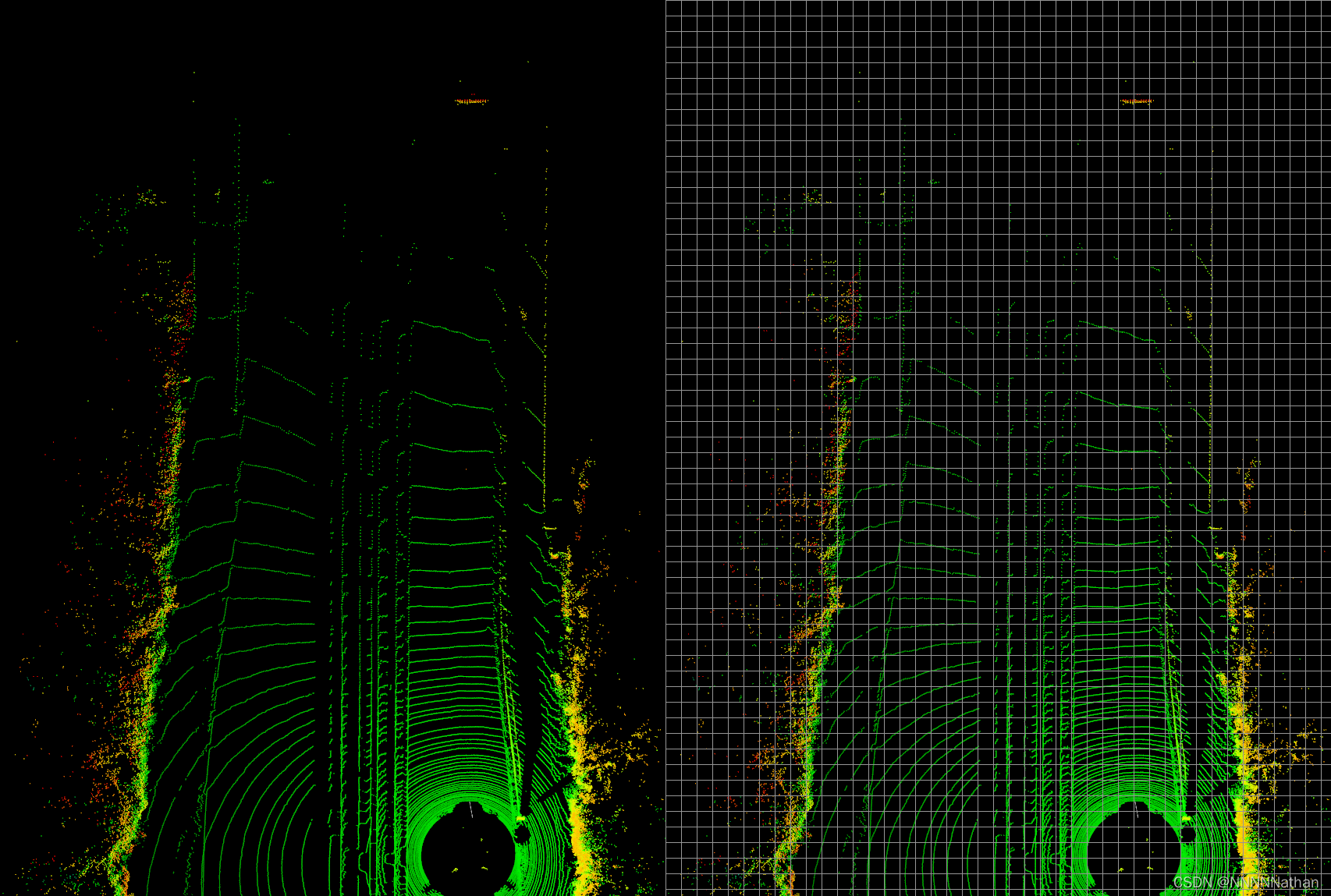
kitti的點云資料是4維度的資料包含(x, y, z, r)其中xyz是改點在點云中的坐標,r代表了改點的反射強度(與物體材質和激光入射角度等有關);并且在將所有點放入每個pillar中的時候不需要像voxel那樣考慮高度,可以將一個pillar理解為就是一個z軸上所有voxel組成在一起的,
在進行PP的資料增強時候,需要對pillar中的資料進行增強操作,需要將每個pillar中的點增加5個維度的資料,包含 x c , y c , z c , x p 和 y p,其中下標c代表了每個點云到改點所對應pillar中所有點平均值的偏移量,下標p代表了該點距離所在pillar中心點的x,y的偏移量,所有經過資料增強操作后每個點的維度是9維;包含了x,y,z, x c , y c , z c , x p 和 y p(注在openpcdet的代碼實作中是10維,多了一個zp,也就是該點在z軸上與該點所處pillar的z軸中心的偏移量)
經過上述操作之后,就可以把原始的點云結構(N*3)變換成了(D,P,N),其中D代表了每個點云的特征維度,也就是每個點云9個特征,P代表了所有非空的立方柱體,N代表了每個pillar中最多會有多少個點,
注:
1、在實作的程序中,每個pillar的長寬是0.16米,在pcdet的實作中,我們只會截取前視圖的部分,進行訓練,因為kitti的標注是根據2號相機進行標注的,所有x軸的負方向(即車的后方)是沒有標注資料的,我們會截取掉后面的資料;同時為了保證檢測的可靠性,距離太遠的點,由于點云過于稀疏,也會被截取,所以在pcdet的實作中,點云空間的選取范圍xyz的最小值是=[0, -39.68,-3], xyz選取的最大值是[69.12, 39.68, 1],
2、其中每個pillar中的最大點云數量是32,如果一個pillar中的點云數量超過32,那么就會隨機采樣,選取32個點;如果一個pillar中的點云數量少于32;那么會對這個pillar使用0樣本填充,
在經過映射后,就獲得了一個(D,P,N)的張量;接下來這里使用了一個簡化版的pointnet網路對點云的資料進行特征提取(即將這些點通過MLP升維,然后跟著BN層和Relu激活層),得到一個(C,P,N)形狀的張量,之后再使用maxpool操作提取每個pillar中最能代表該pillar的點,那么輸出會變成(C,P,N)->(C,P);在經過上述操作編碼后的點,需要重新放回到原來對應pillar的x,y位置上生成偽圖象資料,
下面看這部分的代碼實作:
預處理實作代碼 pcdet/datasets/processor/data_processor.py
def transform_points_to_voxels(self, data_dict=None, config=None):
"""
將點云轉換為pillar,使用spconv的VoxelGeneratorV2
因為pillar可是認為是一個z軸上所有voxel的集合,所以在設定的時候,
只需要將每個voxel的高度設定成kitti中點云的最大高度即可
"""
#初始化點云轉換成pillar需要的引數
if data_dict is None:
# kitti截取的點云范圍是[0, -39.68, -3, 69.12, 39.68, 1]
# 得到[69.12, 79.36, 4]/[0.16, 0.16, 4] = [432, 496, 1]
grid_size = (self.point_cloud_range[3:6] - self.point_cloud_range[0:3]) / np.array(config.VOXEL_SIZE)
self.grid_size = np.round(grid_size).astype(np.int64)
self.voxel_size = config.VOXEL_SIZE
# just bind the config, we will create the VoxelGeneratorWrapper later,
# to avoid pickling issues in multiprocess spawn
return partial(self.transform_points_to_voxels, config=config)
if self.voxel_generator is None:
self.voxel_generator = VoxelGeneratorWrapper(
#給定每個pillar的大小 [0.16, 0.16, 4]
vsize_xyz=config.VOXEL_SIZE,
#給定點云的范圍 [0, -39.68, -3, 69.12, 39.68, 1]
coors_range_xyz=self.point_cloud_range,
#給定每個點云的特征維度,這里是x,y,z,r 其中r是激光雷達反射強度
num_point_features=self.num_point_features,
#給定每個pillar中最多能有多少個點 32
max_num_points_per_voxel=config.MAX_POINTS_PER_VOXEL,
#最多選取多少個pillar,因為生成的pillar中,很多都是沒有點在里面的
# 可以重上面的可視化影像中查看到,所以這里只需要得到那些非空的pillar就行
max_num_voxels=config.MAX_NUMBER_OF_VOXELS[self.mode], # 16000
)
points = data_dict['points']
# 生成pillar輸出
voxel_output = self.voxel_generator.generate(points)
# 假設一份點云資料是N*4,那么經過pillar生成后會得到三份資料
# voxels代表了每個生成的pillar資料,維度是[M,32,4]
# coordinates代表了每個生成的pillar所在的zyx軸坐標,維度是[M,3],其中z恒為0
# num_points代表了每個生成的pillar中有多少個有效的點維度是[m,],因為不滿32會被0填充
voxels, coordinates, num_points = voxel_output
if not data_dict['use_lead_xyz']:
voxels = voxels[..., 3:] # remove xyz in voxels(N, 3)
data_dict['voxels'] = voxels
data_dict['voxel_coords'] = coordinates
data_dict['voxel_num_points'] = num_points
return data_dict
# 下面是使用spconv生成pillar的代碼
class VoxelGeneratorWrapper():
def __init__(self, vsize_xyz, coors_range_xyz, num_point_features, max_num_points_per_voxel, max_num_voxels):
try:
from spconv.utils import VoxelGeneratorV2 as VoxelGenerator
self.spconv_ver = 1
except:
try:
from spconv.utils import VoxelGenerator
self.spconv_ver = 1
except:
from spconv.utils import Point2VoxelCPU3d as VoxelGenerator
self.spconv_ver = 2
if self.spconv_ver == 1:
self._voxel_generator = VoxelGenerator(
voxel_size=vsize_xyz,
point_cloud_range=coors_range_xyz,
max_num_points=max_num_points_per_voxel,
max_voxels=max_num_voxels
)
else:
self._voxel_generator = VoxelGenerator(
vsize_xyz=vsize_xyz,
coors_range_xyz=coors_range_xyz,
num_point_features=num_point_features,
max_num_points_per_voxel=max_num_points_per_voxel,
max_num_voxels=max_num_voxels
)
def generate(self, points):
if self.spconv_ver == 1:
voxel_output = self._voxel_generator.generate(points)
if isinstance(voxel_output, dict):
voxels, coordinates, num_points = \
voxel_output['voxels'], voxel_output['coordinates'], voxel_output['num_points_per_voxel']
else:
voxels, coordinates, num_points = voxel_output
else:
assert tv is not None, f"Unexpected error, library: 'cumm' wasn't imported properly."
voxel_output = self._voxel_generator.point_to_voxel(tv.from_numpy(points))
tv_voxels, tv_coordinates, tv_num_points = voxel_output
# make copy with numpy(), since numpy_view() will disappear as soon as the generator is deleted
voxels = tv_voxels.numpy()
coordinates = tv_coordinates.numpy()
num_points = tv_num_points.numpy()
return voxels, coordinates, num_points在經過上面的預處理之后,就需要使用簡化版的pointnet網路對每個pillar中的資料進行特征提取了,
代碼在pcdet/models/backbones_3d/vfe/pillar_vfe.py
import torch
import torch.nn as nn
import torch.nn.functional as F
from .vfe_template import VFETemplate
class PFNLayer(nn.Module):
def __init__(self,
in_channels,
out_channels,
use_norm=True,
last_layer=False):
super().__init__()
self.last_vfe = last_layer
self.use_norm = use_norm
if not self.last_vfe:
out_channels = out_channels // 2
if self.use_norm:
# 根據論文中,這是是簡化版pointnet網路層的初始化
# 論文中使用的是 1x1 的卷積層完成這里的升維操作(理論上使用卷積的計算速度會更快)
# 輸入的通道數是剛剛經過資料增強過后的點云特征,每個點云有10個特征,
# 輸出的通道數是64
self.linear = nn.Linear(in_channels, out_channels, bias=False)
# 一維BN層
self.norm = nn.BatchNorm1d(out_channels, eps=1e-3, momentum=0.01)
else:
self.linear = nn.Linear(in_channels, out_channels, bias=True)
self.part = 50000
def forward(self, inputs):
if inputs.shape[0] > self.part:
# nn.Linear performs randomly when batch size is too large
num_parts = inputs.shape[0] // self.part
part_linear_out = [self.linear(inputs[num_part * self.part:(num_part + 1) * self.part])
for num_part in range(num_parts + 1)]
x = torch.cat(part_linear_out, dim=0)
else:
# x的維度由(M, 32, 10)升維成了(M, 32, 64)
x = self.linear(inputs)
torch.backends.cudnn.enabled = False
# BatchNorm1d層:(M, 64, 32) --> (M, 32, 64)
# (pillars,num_point,channel)->(pillars,channel,num_points)
# 這里之所以變換維度,是因為BatchNorm1d在通道維度上進行,對于影像來說默認模式為[N,C,H*W],通道在第二個維度上
x = self.norm(x.permute(0, 2, 1)).permute(0, 2, 1) if self.use_norm else x
torch.backends.cudnn.enabled = True
x = F.relu(x)
# 完成pointnet的最大池化操作,找出每個pillar中最能代表該pillar的點
# x_max shape :(M, 1, 64)
x_max = torch.max(x, dim=1, keepdim=True)[0]
if self.last_vfe:
# 回傳經過簡化版pointnet處理pillar的結果
return x_max
else:
x_repeat = x_max.repeat(1, inputs.shape[1], 1)
x_concatenated = torch.cat([x, x_repeat], dim=2)
return x_concatenated
class PillarVFE(VFETemplate):
"""
model_cfg:NAME: PillarVFE
WITH_DISTANCE: False
USE_ABSLOTE_XYZ: True
USE_NORM: True
NUM_FILTERS: [64]
num_point_features:4
voxel_size:[0.16 0.16 4]
POINT_CLOUD_RANGE: [0, -39.68, -3, 69.12, 39.68, 1]
"""
def __init__(self, model_cfg, num_point_features, voxel_size, point_cloud_range, **kwargs):
super().__init__(model_cfg=model_cfg)
self.use_norm = self.model_cfg.USE_NORM
self.with_distance = self.model_cfg.WITH_DISTANCE
self.use_absolute_xyz = self.model_cfg.USE_ABSLOTE_XYZ
num_point_features += 6 if self.use_absolute_xyz else 3
if self.with_distance:
num_point_features += 1
self.num_filters = self.model_cfg.NUM_FILTERS
assert len(self.num_filters) > 0
num_filters = [num_point_features] + list(self.num_filters)
pfn_layers = []
for i in range(len(num_filters) - 1):
in_filters = num_filters[i]
out_filters = num_filters[i + 1]
pfn_layers.append(
PFNLayer(in_filters, out_filters, self.use_norm, last_layer=(i >= len(num_filters) - 2))
)
# 加入線性層,將10維特征變為64維特征
self.pfn_layers = nn.ModuleList(pfn_layers)
self.voxel_x = voxel_size[0]
self.voxel_y = voxel_size[1]
self.voxel_z = voxel_size[2]
self.x_offset = self.voxel_x / 2 + point_cloud_range[0]
self.y_offset = self.voxel_y / 2 + point_cloud_range[1]
self.z_offset = self.voxel_z / 2 + point_cloud_range[2]
def get_output_feature_dim(self):
return self.num_filters[-1]
def get_paddings_indicator(self, actual_num, max_num, axis=0):
"""
計算padding的指示
Args:
actual_num:每個voxel實際點的數量(M,)
max_num:voxel最大點的數量(32,)
Returns:
paddings_indicator:表明一個pillar中哪些是真實資料,哪些是填充的0資料
"""
# 擴展一個維度,使變為(M,1)
actual_num = torch.unsqueeze(actual_num, axis + 1)
# [1, 1]
max_num_shape = [1] * len(actual_num.shape)
# [1, -1]
max_num_shape[axis + 1] = -1
# (1,32)
max_num = torch.arange(max_num, dtype=torch.int, device=actual_num.device).view(max_num_shape)
# (M, 32)
paddings_indicator = actual_num.int() > max_num
return paddings_indicator
def forward(self, batch_dict, **kwargs):
"""
batch_dict:
points:(N,5) --> (batch_index,x,y,z,r) batch_index代表了該點云資料在當前batch中的index
frame_id:(4,) --> (003877,001908,006616,005355) 幀ID
gt_boxes:(4,40,8)--> (x,y,z,dx,dy,dz,ry,class)
use_lead_xyz:(4,) --> (1,1,1,1)
voxels:(M,32,4) --> (x,y,z,r)
voxel_coords:(M,4) --> (batch_index,z,y,x) batch_index代表了該點云資料在當前batch中的index
voxel_num_points:(M,)
image_shape:(4,2) 每份點云資料對應的2號相機圖片解析度
batch_size:4 batch_size大小
"""
voxel_features, voxel_num_points, coords = batch_dict['voxels'], batch_dict['voxel_num_points'], batch_dict[
'voxel_coords']
# 求每個pillar中所有點云的和 (M, 32, 3)->(M, 1, 3) 設定keepdim=True的,則保留原來的維度資訊
# 然后在使用求和資訊除以每個點云中有多少個點來求每個pillar中所有點云的平均值 points_mean shape:(M, 1, 3)
points_mean = voxel_features[:, :, :3].sum(dim=1, keepdim=True) / voxel_num_points.type_as(voxel_features).view(
-1, 1, 1)
# 每個點云資料減去該點對應pillar的平均值得到差值 xc,yc,zc
f_cluster = voxel_features[:, :, :3] - points_mean
# 創建每個點云到該pillar的坐標中心點偏移量空資料 xp,yp,zp
f_center = torch.zeros_like(voxel_features[:, :, :3])
# coords是每個網格點的坐標,即[432, 496, 1],需要乘以每個pillar的長寬得到點云資料中實際的長寬(單位米)
# 同時為了獲得每個pillar的中心點坐標,還需要加上每個pillar長寬的一半得到中心點坐標
# 每個點的x、y、z減去對應pillar的坐標中心點,得到每個點到該點中心點的偏移量
f_center[:, :, 0] = voxel_features[:, :, 0] - (
coords[:, 3].to(voxel_features.dtype).unsqueeze(1) * self.voxel_x + self.x_offset)
f_center[:, :, 1] = voxel_features[:, :, 1] - (
coords[:, 2].to(voxel_features.dtype).unsqueeze(1) * self.voxel_y + self.y_offset)
# 此處偏移多了z軸偏移 論文中沒有z軸偏移
f_center[:, :, 2] = voxel_features[:, :, 2] - (
coords[:, 1].to(voxel_features.dtype).unsqueeze(1) * self.voxel_z + self.z_offset)
# 如果使用絕對坐標,直接組合
if self.use_absolute_xyz:
features = [voxel_features, f_cluster, f_center]
# 否則,取voxel_features的3維之后,在組合
else:
features = [voxel_features[..., 3:], f_cluster, f_center]
# 如果使用距離資訊
if self.with_distance:
# torch.norm的第一個2指的是求2范數,第二個2是在第三維度求范數
points_dist = torch.norm(voxel_features[:, :, :3], 2, 2, keepdim=True)
features.append(points_dist)
# 將特征在最后一維度拼接 得到維度為(M,32,10)的張量
features = torch.cat(features, dim=-1)
# 每個pillar中點云的最大數量
voxel_count = features.shape[1]
"""
由于在生成每個pillar中,不滿足最大32個點的pillar會存在由0填充的資料,
而剛才上面的計算中,會導致這些
由0填充的資料在計算出現xc,yc,zc和xp,yp,zp出現數值,
所以需要將這個被填充的資料的這些數值清0,
因此使用get_paddings_indicator計算features中哪些是需要被保留真實資料和需要被置0的填充資料
"""
# 得到mask維度是(M, 32)
# mask中指名了每個pillar中哪些是需要被保留的資料
mask = self.get_paddings_indicator(voxel_num_points, voxel_count, axis=0)
# (M, 32)->(M, 32, 1)
mask = torch.unsqueeze(mask, -1).type_as(voxel_features)
# 將feature中被填充資料的所有特征置0
features *= mask
for pfn in self.pfn_layers:
features = pfn(features)
# (M, 64), 每個pillar抽象出一個64維特征
features = features.squeeze()
batch_dict['pillar_features'] = features
return batch_dict
在經過簡化版的pointnet網路提取出每個pillar的特征資訊后,就需要將每個的pillar資料重新放回原來的坐標分布中來組成偽影像資料了,
代碼在pcdet/models/backbones_2d/map_to_bev/pointpillar_scatter.py
import torch
import torch.nn as nn
class PointPillarScatter(nn.Module):
"""
對應到論文中就是stacked pillars,將生成的pillar按照坐標索引還原到原空間中
"""
def __init__(self, model_cfg, grid_size, **kwargs):
super().__init__()
self.model_cfg = model_cfg
self.num_bev_features = self.model_cfg.NUM_BEV_FEATURES # 64
self.nx, self.ny, self.nz = grid_size # [432,496,1]
assert self.nz == 1
def forward(self, batch_dict, **kwargs):
"""
Args:
pillar_features:(M,64)
coords:(M, 4) 第一維是batch_index 其余維度為xyz
Returns:
batch_spatial_features:(batch_size, 64, 496, 432)
"""
# 拿到經過前面pointnet處理過后的pillar資料和每個pillar所在點云中的坐標位置
# pillar_features 維度 (M, 64)
# coords 維度 (M, 4)
pillar_features, coords = batch_dict['pillar_features'], batch_dict['voxel_coords']
# 將轉換成為偽影像的資料存在到該串列中
batch_spatial_features = []
batch_size = coords[:, 0].max().int().item() + 1
# batch中的每個資料獨立處理
for batch_idx in range(batch_size):
# 創建一個空間坐標所有用來接受pillar中的資料
# self.num_bev_features是64
# self.nz * self.nx * self.ny是生成的空間坐標索引 [496, 432, 1]的乘積
# spatial_feature 維度 (64,214272)
spatial_feature = torch.zeros(
self.num_bev_features,
self.nz * self.nx * self.ny,
dtype=pillar_features.dtype,
device=pillar_features.device) # (64,214272)-->1x432x496=214272
# 從coords[:, 0]取出該batch_idx的資料mask
batch_mask = coords[:, 0] == batch_idx
# 根據mask提取坐標
this_coords = coords[batch_mask, :]
# this_coords中存盤的坐標是z,y和x的形式,且只有一層,因此計算索引的方式如下
# 平鋪后需要計算前面有多少個pillar 一直到當前pillar的索引
"""
因為前面是將所有資料flatten成一維的了,相當于一個圖片寬高為[496, 432]的圖片
被flatten成一維的圖片資料了,變成了496*432=214272;
而this_coords中存盤的是平面(不需要考慮Z軸)中一個點的資訊,所以要
將這個點的位置放回被flatten的一位資料時,需要計算在該點之前所有行的點總和加上
該點所在的列即可
"""
# 這里得到所有非空pillar在偽影像的對應索引位置
indices = this_coords[:, 1] + this_coords[:, 2] * self.nx + this_coords[:, 3]
# 轉換資料型別
indices = indices.type(torch.long)
# 根據mask提取pillar_features
pillars = pillar_features[batch_mask, :]
pillars = pillars.t()
# 在索引位置填充pillars
spatial_feature[:, indices] = pillars
# 將空間特征加入list,每個元素為(64, 214272)
batch_spatial_features.append(spatial_feature)
# 在第0個維度將所有的資料堆疊在一起
batch_spatial_features = torch.stack(batch_spatial_features, 0)
# reshape回原空間(偽影像) (4, 64, 214272)--> (4, 64, 496, 432)
batch_spatial_features = batch_spatial_features.view(batch_size, self.num_bev_features * self.nz, self.ny,
self.nx)
# 將結果加入batch_dict
batch_dict['spatial_features'] = batch_spatial_features
return batch_dict
三、使用2D BackBone提取特征
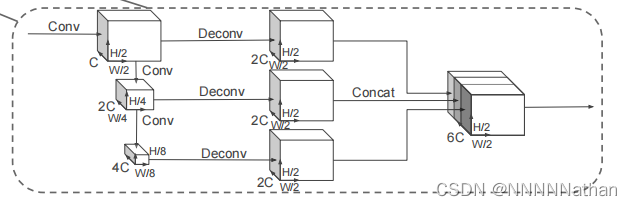
經過上面的映射操作,將原來的pillar提取最大的數值后放回到相應的坐標后,就可以得到類似于影像的資料了;只有在有pillar非空的坐標處有提取的點云資料,其余地方都是0資料,所以得到的一個(batch_size,64, 432, 496)的張量還是很稀疏的,
下圖是對得到的張量資料使用2D中的特征提取手段進行多尺度的特征提取和拼接融合,
這沒有好決議的就是常規的卷積操作然后進行拼接即可,注意一下維度變換就可以,
最終經過所有上采樣層得到的3個尺度的的資訊 每個尺度的 shape 都是 (batch_size, 128, 248, 216) 在第一個維度上進行拼接得到x 維度是 (batch_size, 384, 248, 216)
代碼在pcdet/models/backbones_2d/base_bev_backbone.py
import numpy as np
import torch
import torch.nn as nn
class BaseBEVBackbone(nn.Module):
def __init__(self, model_cfg, input_channels):
super().__init__()
self.model_cfg = model_cfg
# 讀取下采樣層引數
if self.model_cfg.get('LAYER_NUMS', None) is not None:
assert len(self.model_cfg.LAYER_NUMS) == len(self.model_cfg.LAYER_STRIDES) == len(
self.model_cfg.NUM_FILTERS)
layer_nums = self.model_cfg.LAYER_NUMS
layer_strides = self.model_cfg.LAYER_STRIDES
num_filters = self.model_cfg.NUM_FILTERS
else:
layer_nums = layer_strides = num_filters = []
# 讀取上采樣層引數
if self.model_cfg.get('UPSAMPLE_STRIDES', None) is not None:
assert len(self.model_cfg.UPSAMPLE_STRIDES) == len(self.model_cfg.NUM_UPSAMPLE_FILTERS)
num_upsample_filters = self.model_cfg.NUM_UPSAMPLE_FILTERS
upsample_strides = self.model_cfg.UPSAMPLE_STRIDES
else:
upsample_strides = num_upsample_filters = []
num_levels = len(layer_nums) # 2
c_in_list = [input_channels, *num_filters[:-1]] # (256, 128) input_channels:256, num_filters[:-1]:64,128
self.blocks = nn.ModuleList()
self.deblocks = nn.ModuleList()
for idx in range(num_levels): # (64,64)-->(64,128)-->(128,256) # 這里為cur_layers的第一層且stride=2
cur_layers = [
nn.ZeroPad2d(1),
nn.Conv2d(
c_in_list[idx], num_filters[idx], kernel_size=3,
stride=layer_strides[idx], padding=0, bias=False
),
nn.BatchNorm2d(num_filters[idx], eps=1e-3, momentum=0.01),
nn.ReLU()
]
for k in range(layer_nums[idx]): # 根據layer_nums堆疊卷積層
cur_layers.extend([
nn.Conv2d(num_filters[idx], num_filters[idx], kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(num_filters[idx], eps=1e-3, momentum=0.01),
nn.ReLU()
])
# 在block中添加該層
# *作用是:將串列解開成幾個獨立的引數,傳入函式 # 類似的運算子還有兩個星號(**),是將字典解開成獨立的元素作為形參
self.blocks.append(nn.Sequential(*cur_layers))
if len(upsample_strides) > 0: # 構造上采樣層 # (1, 2, 4)
stride = upsample_strides[idx]
if stride >= 1:
self.deblocks.append(nn.Sequential(
nn.ConvTranspose2d(
num_filters[idx], num_upsample_filters[idx],
upsample_strides[idx],
stride=upsample_strides[idx], bias=False
),
nn.BatchNorm2d(num_upsample_filters[idx], eps=1e-3, momentum=0.01),
nn.ReLU()
))
else:
stride = np.round(1 / stride).astype(np.int)
self.deblocks.append(nn.Sequential(
nn.Conv2d(
num_filters[idx], num_upsample_filters[idx],
stride,
stride=stride, bias=False
),
nn.BatchNorm2d(num_upsample_filters[idx], eps=1e-3, momentum=0.01),
nn.ReLU()
))
c_in = sum(num_upsample_filters) # 512
if len(upsample_strides) > num_levels:
self.deblocks.append(nn.Sequential(
nn.ConvTranspose2d(c_in, c_in, upsample_strides[-1], stride=upsample_strides[-1], bias=False),
nn.BatchNorm2d(c_in, eps=1e-3, momentum=0.01),
nn.ReLU(),
))
self.num_bev_features = c_in
def forward(self, data_dict):
"""
Args:
data_dict:
spatial_features : (4, 64, 496, 432)
Returns:
"""
spatial_features = data_dict['spatial_features']
ups = []
ret_dict = {}
x = spatial_features
for i in range(len(self.blocks)):
x = self.blocks[i](x)
stride = int(spatial_features.shape[2] / x.shape[2])
ret_dict['spatial_features_%dx' % stride] = x
if len(self.deblocks) > 0: # (4,64,248,216)-->(4,128,124,108)-->(4,256,62,54)
ups.append(self.deblocks[i](x))
else:
ups.append(x)
# 如果存在上采樣層,將上采樣結果連接
if len(ups) > 1:
"""
最終經過所有上采樣層得到的3個尺度的的資訊
每個尺度的 shape 都是 (batch_size, 128, 248, 216)
在第一個維度上進行拼接得到x 維度是 (batch_size, 384, 248, 216)
"""
x = torch.cat(ups, dim=1)
elif len(ups) == 1:
x = ups[0]
# Fasle
if len(self.deblocks) > len(self.blocks):
x = self.deblocks[-1](x)
# 將結果存盤在spatial_features_2d中并回傳
data_dict['spatial_features_2d'] = x
return data_dict
四、檢測頭實作
PiontPillars中的檢測頭采用了類似SSD的檢測頭設定,在openpcdet的實作中,直接使用了一個網路訓練車、人、自行車三個類別;沒有像原論文中對車、人使用兩種不同的網路結構,因此在檢測頭的先驗框設定上,一共有三個類別的先驗框,每個先驗框都有兩個方向分別是BEV視角下的0度和90度,每個類別的先驗證只有一種尺度資訊;分別是車 [3.9, 1.6, 1.56]、人[0.8, 0.6, 1.73]、自行車[1.76, 0.6, 1.73](單位:米),
在anchor匹配GT的程序中,使用的是2D IOU匹配方式,直接從生成的特征圖也就是BEV視角進行匹配;不需要考慮高度資訊,原因有二:1、因為在kitti資料集中所有的物體都是在三維空間的同一個平面中的,沒有車在車上面的一個情況, 2、所有類別物體之間的高度差別不是很大,直接使用SmoothL1回歸就可以得到很好的結果, 其次是每個anchor被設定為正負樣本的iou閾值是:
車匹配iou閾值大于等于0.65為正樣本,小于0.45為負樣本,中間的不計算損失,
人匹配iou閾值大于等于0.5為正樣本,小于0.35為負樣本,中間的不計算損失,
自行車匹配iou閾值大于等于0.5為正樣本,小于0.35為負樣本,中間的不計算損失,
其中每個anchor都需要預測7個引數,分別是 (x, y, z, w, l, h, θ),其中x, y, z預測一個anchor的中心坐標在點云中的位置, w,l,h分別預測了一個anchor的長寬高資料,θ預測了box的偏移角度,
同時,因為在角度預測時候不可以區分兩個完全相反的box,所以PiontPillars的檢測頭中還添加了對一個anchor的方向預測;這里使用了一個基于softmax的方向分類box的兩個朝向資訊,
代碼在 pcdet/models/dense_heads/anchor_head_single.py
import numpy as np
import torch.nn as nn
from .anchor_head_template import AnchorHeadTemplate
class AnchorHeadSingle(AnchorHeadTemplate):
"""
Args:
model_cfg: AnchorHeadSingle的配置
input_channels: 384 輸入通道數
num_class: 3
class_names: ['Car','Pedestrian','Cyclist']
grid_size: (432, 496, 1)
point_cloud_range: (0, -39.68, -3, 69.12, 39.68, 1)
predict_boxes_when_training: False
"""
def __init__(self, model_cfg, input_channels, num_class, class_names, grid_size, point_cloud_range,
predict_boxes_when_training=True, **kwargs):
super().__init__(
model_cfg=model_cfg, num_class=num_class, class_names=class_names, grid_size=grid_size,
point_cloud_range=point_cloud_range,
predict_boxes_when_training=predict_boxes_when_training
)
# 每個點有3個尺度的個先驗框 每個先驗框都有兩個方向(0度,90度) num_anchors_per_location:[2, 2, 2]
self.num_anchors_per_location = sum(self.num_anchors_per_location) # sum([2, 2, 2])
# Conv2d(512,18,kernel_size=(1,1),stride=(1,1))
self.conv_cls = nn.Conv2d(
input_channels, self.num_anchors_per_location * self.num_class,
kernel_size=1
)
# Conv2d(512,42,kernel_size=(1,1),stride=(1,1))
self.conv_box = nn.Conv2d(
input_channels, self.num_anchors_per_location * self.box_coder.code_size,
kernel_size=1
)
# 如果存在方向損失,則添加方向卷積層Conv2d(512,12,kernel_size=(1,1),stride=(1,1))
if self.model_cfg.get('USE_DIRECTION_CLASSIFIER', None) is not None:
self.conv_dir_cls = nn.Conv2d(
input_channels,
self.num_anchors_per_location * self.model_cfg.NUM_DIR_BINS,
kernel_size=1
)
else:
self.conv_dir_cls = None
self.init_weights()
# 初始化引數
def init_weights(self):
pi = 0.01
# 初始化分類卷積偏置
nn.init.constant_(self.conv_cls.bias, -np.log((1 - pi) / pi))
# 初始化分類卷積權重
nn.init.normal_(self.conv_box.weight, mean=0, std=0.001)
def forward(self, data_dict):
# 從字典中取出經過backbone處理過的資訊
# spatial_features_2d 維度 (batch_size, 384, 248, 216)
spatial_features_2d = data_dict['spatial_features_2d']
# 每個坐標點上面6個先驗框的類別預測 --> (batch_size, 18, 200, 176)
cls_preds = self.conv_cls(spatial_features_2d)
# 每個坐標點上面6個先驗框的引數預測 --> (batch_size, 42, 200, 176) 其中每個先驗框需要預測7個引數,分別是(x, y, z, w, l, h, θ)
box_preds = self.conv_box(spatial_features_2d)
# 維度調整,將類別放置在最后一維度 [N, H, W, C] --> (batch_size, 200, 176, 18)
cls_preds = cls_preds.permute(0, 2, 3, 1).contiguous()
# 維度調整,將先驗框調整引數放置在最后一維度 [N, H, W, C] --> (batch_size ,200, 176, 42)
box_preds = box_preds.permute(0, 2, 3, 1).contiguous()
# 將類別和先驗框調整預測結果放入前向傳播字典中
self.forward_ret_dict['cls_preds'] = cls_preds
self.forward_ret_dict['box_preds'] = box_preds
# 進行方向分類預測
if self.conv_dir_cls is not None:
# # 每個先驗框都要預測為兩個方向中的其中一個方向 --> (batch_size, 12, 200, 176)
dir_cls_preds = self.conv_dir_cls(spatial_features_2d)
# 將類別和先驗框方向預測結果放到最后一個維度中 [N, H, W, C] --> (batch_size, 248, 216, 12)
dir_cls_preds = dir_cls_preds.permute(0, 2, 3, 1).contiguous()
# 將方向預測結果放入前向傳播字典中
self.forward_ret_dict['dir_cls_preds'] = dir_cls_preds
else:
dir_cls_preds = None
"""
如果是在訓練模式的時候,需要對每個先驗框分配GT來計算loss
"""
if self.training:
# targets_dict = {
# 'box_cls_labels': cls_labels, # (4,211200)
# 'box_reg_targets': bbox_targets, # (4,211200, 7)
# 'reg_weights': reg_weights # (4,211200)
# }
targets_dict = self.assign_targets(
gt_boxes=data_dict['gt_boxes'] # (4,39,8)
)
# 將GT分配結果放入前向傳播字典中
self.forward_ret_dict.update(targets_dict)
# 如果不是訓練模式,則直接生成進行box的預測
if not self.training or self.predict_boxes_when_training:
# 根據預測結果解碼生成最終結果
batch_cls_preds, batch_box_preds = self.generate_predicted_boxes(
batch_size=data_dict['batch_size'],
cls_preds=cls_preds, box_preds=box_preds, dir_cls_preds=dir_cls_preds
)
data_dict['batch_cls_preds'] = batch_cls_preds # (1, 211200, 3) 70400*3=211200
data_dict['batch_box_preds'] = batch_box_preds # (1, 211200, 7)
data_dict['cls_preds_normalized'] = False
return data_dict
五、loss計算
在Pointpillars的loss計算中,使用了與SECOND相同的loss計算方式,每個GT框都包含了 (x, y, z, w, l, h, θ)這7個引數,
1、loss理論計算
1.定位任務的回歸殘差定義如下:
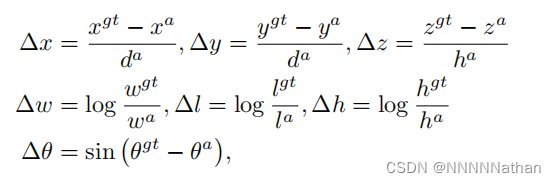
其中x^gt代表了標注框的x長度 ;x^a代表了先驗框的長度資訊,d^a表示先驗框長度和寬度的對角線距離,定義為:![]() ,
,
因此得到的總回歸損失是:  ,
,
2.類別分類任務
對于每個先驗框的物體類別分類,PointPillars使用了focal loss,來完成調節正負樣本均衡,和難樣本挖掘,公式定義如下:
??????? ![]()
其中,aplha引數和gamma引數都和RetinaNet中的設定一樣,分別為0.25和2,
3.先驗框方向分類
由于在角度回歸的時候,不可以完全區分兩個兩個方向完全相反的預測框,所以在實作的時候,作者加入了對先驗框的方向分類,使用softmax函式預測方向的類別,
因此總損失定義如下:
其中,系數Beta_loc為2,Beta_cls為1,Beta_dir為0.2,
2、loss計算代碼實作
在loss計算的代碼實作中涉及的代碼量比較多,因此決議分為如下三個部分分別完成
1、先驗框的生成
2、GT和先驗框的匹配
3、loss計算實作
1、先驗框的生成
代碼在pcdet/models/dense_heads/target_assigner/anchor_generator.py
import torch
class AnchorGenerator(object):
def __init__(self, anchor_range, anchor_generator_config):
super().__init__()
self.anchor_generator_cfg = anchor_generator_config # list:3
# 得到anchor在點云中的分布范圍[0, -39.68, -3, 69.12, 39.68, 1]
self.anchor_range = anchor_range
# 得到配置引數中所有尺度anchor的長寬高
# list:3 --> 車、人、自行車[[[3.9, 1.6, 1.56]],[[0.8, 0.6, 1.73]],[[1.76, 0.6, 1.73]]]
self.anchor_sizes = [config['anchor_sizes'] for config in anchor_generator_config]
# 得到anchor的旋轉角度,這是是弧度,也就是0度和90度
# list:3 --> [[0, 1.57],[0, 1.57],[0, 1.57]]
self.anchor_rotations = [config['anchor_rotations'] for config in anchor_generator_config]
# 得到每個anchor初始化在點云中z軸的位置,其中在kitti中點云的z軸范圍是-3米到1米
# list:3 --> [[-1.78],[-0.6],[-0.6]]
self.anchor_heights = [config['anchor_bottom_heights'] for config in anchor_generator_config]
# 每個先驗框產生的時候是否需要在每個格子的中間,
# 例如坐標點為[1,1],如果需要對齊中心點的話,需要加上0.5變成[1.5, 1.5]
# 默認為False
# list:3 --> [False, False, False]
self.align_center = [config.get('align_center', False) for config in anchor_generator_config]
assert len(self.anchor_sizes) == len(self.anchor_rotations) == len(self.anchor_heights)
self.num_of_anchor_sets = len(self.anchor_sizes) # 3
def generate_anchors(self, grid_sizes):
assert len(grid_sizes) == self.num_of_anchor_sets
# 1.初始化
all_anchors = []
num_anchors_per_location = []
# 2.三個類別的先驗框逐類別生成
for grid_size, anchor_size, anchor_rotation, anchor_height, align_center in zip(
grid_sizes, self.anchor_sizes, self.anchor_rotations, self.anchor_heights, self.align_center):
# 2 = 2x1x1 --> 每個位置產生2個anchor,這里的2代表兩個方向
num_anchors_per_location.append(len(anchor_rotation) * len(anchor_size) * len(anchor_height))
# 不需要對齊中心點來生成先驗框
if align_center:
x_stride = (self.anchor_range[3] - self.anchor_range[0]) / grid_size[0]
y_stride = (self.anchor_range[4] - self.anchor_range[1]) / grid_size[1]
# 中心對齊,平移半個網格
x_offset, y_offset = x_stride / 2, y_stride / 2
else:
# 2.1計算每個網格的在點云空間中的實際大小
# 用于將每個anchor映射回實際點云中的大小
# (69.12 - 0) / (216 - 1) = 0.3214883848678234 單位:米
x_stride = (self.anchor_range[3] - self.anchor_range[0]) / (grid_size[0] - 1)
# (39.68 - (-39.68.)) / (248 - 1) = 0.3212955490297634 單位:米
y_stride = (self.anchor_range[4] - self.anchor_range[1]) / (grid_size[1] - 1)
# 由于沒有進行中心對齊,所有每個點相對于左上角坐標的偏移量都是0
x_offset, y_offset = 0, 0
# 2.2 生成單個維度x_shifts,y_shifts和z_shifts
# 以x_stride為step,在self.anchor_range[0] + x_offset和self.anchor_range[3] + 1e-5,
# 產生x坐標 --> 216個點 [0, 69.12]
x_shifts = torch.arange(
self.anchor_range[0] + x_offset, self.anchor_range[3] + 1e-5, step=x_stride, dtype=torch.float32,
).cuda()
# 產生y坐標 --> 248個點 [0, 79.36]
y_shifts = torch.arange(
self.anchor_range[1] + y_offset, self.anchor_range[4] + 1e-5, step=y_stride, dtype=torch.float32,
).cuda()
"""
new_tensor函式可以回傳一個新的張量資料,該張量資料與指定的有相同的屬性
如擁有相同的資料型別和設備型別等;
并使用anchor_height對這個來填充這個張量
"""
# [-1.78]
z_shifts = x_shifts.new_tensor(anchor_height)
# num_anchor_size = 1
# num_anchor_rotation = 2
num_anchor_size, num_anchor_rotation = anchor_size.__len__(), anchor_rotation.__len__() # 1, 2
# [0, 1.57] 弧度制
anchor_rotation = x_shifts.new_tensor(anchor_rotation)
# [[3.9, 1.6, 1.56]]
anchor_size = x_shifts.new_tensor(anchor_size)
# 2.3 呼叫meshgrid生成網格坐標
x_shifts, y_shifts, z_shifts = torch.meshgrid([
x_shifts, y_shifts, z_shifts
])
# meshgrid可以理解為在原來的維度上進行擴展,例如:
# x原來為(216,)-->(216,1, 1)--> (216,248,1)
# y原來為(248,)--> (1,248,1)--> (216,248,1)
# z原來為 (1, ) --> (1,1,1) --> (216,248,1)
# 2.4.anchor各個維度堆疊組合,生成最終anchor(1,432,496,1,2,7)
# 2.4.1.堆疊anchor的位置
# [x, y, z, 3]-->[216, 248, 1, 3] 代表了每個anchor的位置資訊
# 其中3為該點所在映射tensor中的(z, y, x)數值
anchors = torch.stack((x_shifts, y_shifts, z_shifts), dim=-1)
# 2.4.2.將anchor的位置和大小進行組合,編程為將anchor擴展并復制為相同維度(除了最后一維),然后進行組合
# (216, 248, 1, 3) --> (216, 248, 1 , 1, 3)
# 維度分別代表了: z,y,x, 該類別anchor的尺度數量,該個anchor的位置資訊
anchors = anchors[:, :, :, None, :].repeat(1, 1, 1, anchor_size.shape[0], 1)
# (1, 1, 1, 1, 3) --> (216, 248, 1, 1, 3)
anchor_size = anchor_size.view(1, 1, 1, -1, 3).repeat([*anchors.shape[0:3], 1, 1])
# anchors生成的最終結果需要有位置資訊和大小資訊 --> (216, 248, 1, 1, 6)
# 最后一個緯度中表示(z, y, x, l, w, h)
anchors = torch.cat((anchors, anchor_size), dim=-1)
# 2.4.3.將anchor的位置和大小和旋轉角進行組合
# 在倒數第二個維度上增加一個維度,然后復制該維度一次
# (216, 248, 1, 1, 2, 6) 長, 寬, 深, anchor數量, 旋轉角個數,anchor位置大小
anchors = anchors[:, :, :, :, None, :].repeat(1, 1, 1, 1, num_anchor_rotation, 1)
# (216, 248, 1, 1, 2, 1) 兩個旋轉方向
anchor_rotation = anchor_rotation.view(1, 1, 1, 1, -1, 1).repeat(
[*anchors.shape[0:3], num_anchor_size, 1, 1])
# [z, y, x, num_size, num_rot, 7] --> (216, 248, 1, 1, 2, 7)
# 最后一個緯度表示為anchors的位置+大小+旋轉角度(z, y, x, l, w, h, theta)
anchors = torch.cat((anchors, anchor_rotation), dim=-1) # [z, y, x, num_size, num_rot, 7]
# 2.5 置換anchor的維度
# [z, y, x, num_anchor_size, num_rot, 7]-->[x, y, z, num_anchor_zie, num_rot, 7]
# 最后一個緯度代表了 : [x, y, z, dx, dy, dz, rot]
anchors = anchors.permute(2, 1, 0, 3, 4, 5).contiguous()
# 使得各類anchor的z軸方向從anchor的底部移動到該anchor的中心點位置
# 車 : -1.78 + 1.56/2 = -1.0
# 人、自行車 : -0.6 + 1.73/2 = 0.23
anchors[..., 2] += anchors[..., 5] / 2
all_anchors.append(anchors)
# all_anchors: [(1,248,216,1,2,7),(1,248,216,1,2,7),(1,248,216,1,2,7)]
# num_anchors_per_location:[2,2,2]
return all_anchors, num_anchors_per_location待續
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/428544.html
標籤:AI