智慧環衛管理系統方案
2022年2月
- 慧環衛專案綜述
- 智慧環衛背景
城市環境衛生管理是一項復雜而系統的社會工程,不僅是一個城市的“臉面”也是一個城市的文明程度的重要標志,是與人民群眾生活最直接、最貼切、最敏感的重要作業之一,隨著城市人民生活水平的快速提高,大家對居住、生活環境的要求越來越高,為進一步提高環境衛生管理水平,樹立城市形象,提升城市品位,必須采取切實可行的措施,加強對城市環境衛生管理,
堅持高效能的管理,全面提高城市環衛作業質量和水平,做好城區環衛作業,為人民群眾創造一個良好的生活環境,是關注民生,構建社會主義和諧社會的客觀要求,也是為人民群眾辦實事、辦好事,其中管理是提高城市環衛作業質量、塑造環衛行業形象的重要基礎作業,也是目前作業中的相對薄榷訓節,在建立健全并嚴格落實各項管理制度的同時進一步建立和完善環衛作業標準、服務規范、作業程式和考核獎懲細則,嚴格實行全員崗位責任制,大力推行精細化管理,
目前的管理模式,存在著日益突出矛盾,表現在:一是城市環衛管理轄區的范圍大,任務重,對轄區環境衛生的監控不全面,生產作業很難按要求到位,影響了環境衛生監督管理;二是生產作業的好與壞,無法追究與考核,缺乏監督,環衛生產作業作業是城市發展的基礎作業,更是實實在在的民生作業,要落實責任,明確任務,強化監管,促進城市管理水平提升,目前環衛作業缺乏長效的考核獎懲機制,缺乏創新的管理手段,
隨著科技的進步,數字化城市、智慧城市的提出,特別是中國北斗技術全面成熟、地理資訊技術GIS的發展為城市管理資訊化提供了技術手段和保證,通過北斗/GPS定位技術、地理資訊技術GIS、視頻監控技術、射頻識別技術RFID、無線通信3G/4G/LoRa、各種傳感器技術等技術實作的城市環衛管理,可以切實達到“對指定的車輛和人員、沿指定的路線、在規定的時間內、到達指定的位置”,支持管理人員對城市環境衛生管理的及時發現、及時跟蹤處理,做到主動預防并輔助管理人員在計劃、執行與跟蹤、考核、標準化等環節的受控管理,
- 智慧環衛建設的必要性
智慧環衛是智慧城市的一個重要組成部分,是通過新一代的資訊技術來改變政府、公眾和企業,以及企業內各部門之間相互互動的方式,以提高互動的效率,智慧環衛的建設可以打通與環衛相關的城市管理部門、環衛公司、環衛人員、環衛設施和環衛車輛等,形成管理倍訓,使市政環衛部門對環衛人員、設備設施、車輛等各各方面的管理和投入的成本更低、效益更高,并能實作可視、可控、可互動和可回圈,其新一代資訊技術具體指的是物聯網、移動互聯網、云計算、GIS、傳感技術以及大資料相關技術,通過各種新技術的應用讓環衛管理從能管到能互動,到更具智能的資訊化,其在應用層面具體表現在更透徹的感知、更廣泛的互動、更深入的智能化三個方面,智慧環衛讓環衛作業的全程序更具透明化,讓作為決策依據的環衛資料更加直觀化,
具體來講,智慧環衛平臺的建設為環衛監管部門添加智慧化的“耳朵”和“眼睛”,能夠實時了解環衛人員、車輛和設備設施的作業狀態、作業資訊、作業歷史等,使環衛作業管理得到透明化和精細化的變革;借助視頻監控、智能識別等先進技術手段,使環衛質量監管降本增效;在深層次的作業資料量化層面,更能夠把脈環衛作業在作業、運行、管理、預期等各個方面所隱含的問題,通過資料模型搭建和資料研讀,實作更合理的環衛動態資源配置,為環衛作業能夠更加科學、健康、持續地發展奠定科學的決策支持依據,
綜上,智慧環衛系統的建設可以有效提升城市環衛的精細化管理、規范化作業、智能化考核水平,讓環衛作業變得有序、有效、可控,
- 智慧環衛意義
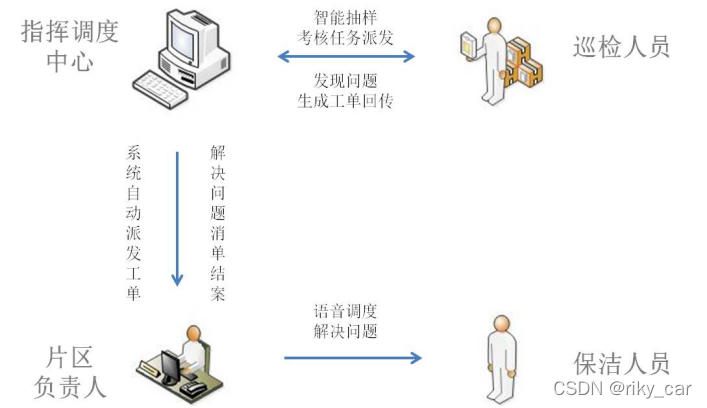
綜合指揮調度中心 - 打通環衛部門、環衛公司、清掃人員及車輛,形成管理倍訓,通過指揮中心實時掌握作業情況,監督作業結果,并實作高效、扁平化的指揮調度,
規范作業,程序自動監管 – 落實人員、車輛的規范化作業,系統自動監管、自動考核、自動評分,實作作業程序全自動監管,
部件設施自動監管 – 實作對化糞池、公廁、垃圾桶/箱、垃圾中轉站的自動監管,實時預警,及時處理,
質量監察,結果全面考核 – 助力督查隊伍、第三方測評人員的檢查作業,實作檢查作業全流程的數字化、規范化和透明化,建立科學完善的常態化自動考核評價體系和長效管理機制,
可視化視頻監控 – 借助移動互聯網、視頻監控等手段,對環衛動態進行監控,對作業結果進行監察,極大地提高了環境衛生的監管效率和管理水平,
環衛資料分析 - 建立涵蓋采集、統計、分析全流程的“環衛資料分析”,制定整套量化考核指標體系,推進精益環衛,
標桿作用 - 提升環衛作業和管理水平,爭先創優,樹立智慧環衛的標桿作用,帶動周邊區域智慧城市管理的全面發展,
1.4 系統構成
智能整個管理系統分成 車輛管理系統,監督考核管理系統,場站管理系統,人員管理系統,垃圾清運管理系統,手機APP,
- 環衛車輛管理系統
2.1 環衛車輛管理背景
隨城市管理現代化的發展,城市環衛作業也越來越走向機械化,傳統的人作業業模式也逐步被車輛、機械取代,隨著城市環衛車輛的越來越來,眾多的環衛車輛在管理上所暴露的問題也越來越多,其在管理上存在的問題主要突出 在以下幾個方面:
- 環衛車輛多,資訊檔案及車務管理落后混亂
- 車輛分布廣,調度難度大,方式落后,效率低下;
- 車輛油耗無法核算,跑冒滴漏,造成能耗成本高
- 作業程序不透明,違規作業無法監管
- 作業規劃不科學不合理,造成不必要的浪費
- 作業量及作業效果無資料支撐,無法考核,
2.2 系統方案說明
系統借助移動互聯網、物聯網、云計算、大資料等前沿技術,利用車載終端、車載攝像頭、智能傳感器等硬體,結合管理云平臺、環衛手機App,為環衛管理部門添加資訊化的“耳朵”和“眼睛”,能夠實時了解環衛車輛(洗掃車、沖水車、垃圾收運車等大小車輛)的作業動態、作業結果和油量水量等運行資料,使環衛車輛作業管理得到透明化和精細化的變革;同時還能地圖查看車輛位置、對講調度,實作可視化、智能化的環衛車輛應急調度,
2.3系統達到的效果
- 建立車輛及駕駛員檔案.
- 通過衛星定位在地圖上直觀顯示所有車輛的位置,同時結合設備對講功能對車輛進行智能高效的調度;
- 借助油量傳感技術,對車輛的加油及用油情況實時監控,匯總統計各車輛的用油及油耗資料,依據油耗資料對車輛進行油耗核算,以節約燃油成本,
- 車輛作業規劃在地圖上直觀呈現,根據環衛作業模式,系統設定作業標準,合理制定作業規劃,為用戶提供直觀、生動的作業規劃全景視圖;
- 作業結果實時監查,系統整合各方視頻,集合智能視頻識別、物聯感知等技術,實作遠程監察各個路段的作業質量,直觀查看作業結果;
- 作業程序實時監控,通過“物聯網”感知設備,實時監管車輛作業狀態,作業里程等多個專業環衛管理指標,對違規作業事件系統自動報警;
2.4 車輛管理系統架構

系統主要有以下幾部分構成:

- 管理物件:包括司機、各類環衛車輛,如:清洗車、清掃車、酒水車、路面養護車,
- 監控采集:主要對油耗傳感器、車載終端、攝像頭、主機設備進行資料采集,上傳系統的服務器,
- 業務流程/功能邏輯:包括如監控指揮、作業管理、圖層資料處理、移動應用、環衛資料管理以及環衛資料中心應用等,
- 展現層:最終用戶使用的功能以及界面,包括圖層管理、監控管理、司機管理、調度指揮、監督考評以及資料分析等,
2.5 車輛資訊管理
2.5.1 基礎資訊管理
對車輛的司機和車輛資訊統一管理,對司機的姓名、電話、部門職務、照片等資訊進行管理,并在地圖直觀展示,方便督查人員路面檢查和對大型車輛的管理;還可以為車輛設定單獨的部門,進行分類管理,每個車輛創建車輛檔案,登記車輛基本資訊,記錄車輛號碼、車輛型號、車輛狀況、百里油耗量,


2.6車輛超速、越界等違規報警展現
通過對車輛作業任務的引數設定,可在地圖上直接通過單選、框選、多邊形選、圓選,選擇設定車輛行駛路線與作業區域,對于已出現違規的車輛,在地圖上顯示它的位置、速度等一些作業資訊,并顯示其預設的行駛路線以及作業規定區域等資訊,

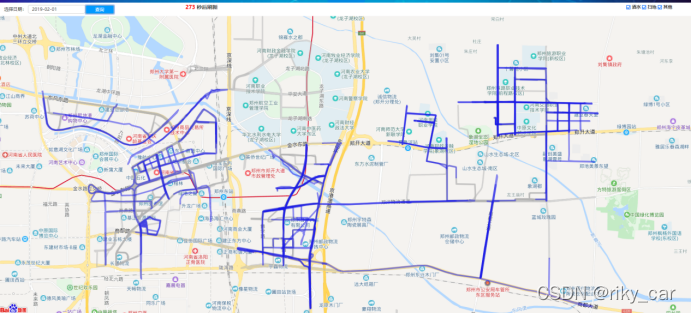
2.7作業分布全圖
實時動態顯示每日、歷史,機掃車輛作業狀態、不同作業顏色區分,
環衛設施運行狀態、外勤人員作業狀態,實時動態顯示各所隊每日任務完成率,
實時GIS地圖顯示,可以歷史查詢任意每天作業記錄,形成實時考評,自動統計每日未完成作業,
基礎地理資訊子系統原型界面
2.8 GPS電子地圖
GPS電子地圖細至鄉鎮村的可無級縮放地圖為平臺,全面展現我國鐵路和各級公路在內的交通狀況,智能化設計國內任意兩地間的行車報告,并配以詳細的文字說明,
2.9 監控管理系統
2.9.1 車輛監控
接收包括直屬快速環路、各區環衛單位的監管資料,對車輛各類情況進行實時監控,包括車輛定位考勤、車輛行駛軌跡、車輛油耗、作業質量進行實時監管,
2.9.2 車輛在線
以串列形式顯示系統中所有車輛,右顯示車輛的在線狀態,對在線車輛進行實時跟蹤和軌跡查看以及各下發各類指令等等,可以根據多個維度進行查詢,查詢的結果可以列印、匯出,
-
-
- 行駛資料監控
-
對于所查詢車輛的選擇可以按單輛車、分組或全部車輛進行,選中車輛的實時位置資訊和行駛資料資訊將向管理中心報告,位置資訊包含經緯度值,行駛狀態資訊包括時間、速度、方向、報警資訊等,
-
-
- 行駛狀態監控
-
管理中心可按單輛車、分組或全部車輛選擇,要求車載終端按照預設時間間隔連續上報車輛的行駛狀態、實時位置等資訊,實作對于車輛的連續的實時監控功能,

可以設定路線時間,車輛在規定時間內作業,不報警,反之則報警,超過規定速度,作業時間,道路擁堵資訊可以實時反饋到監控中心,統計匯總,作業車輛一周內,一月內,一年內,出勤次數,沒有按照實際規定作業正晚點率,沒有按照規定行駛速度統計匯總,
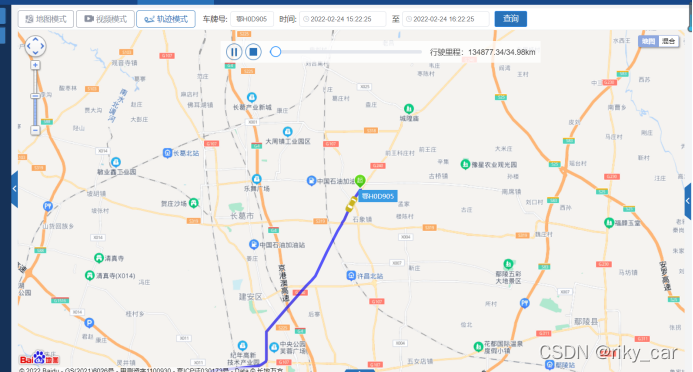
2.9.3 歷史軌跡回放
車載終端上存盤的歷史軌跡記錄可以由管理中心通過無線方式按照時間段提取后存盤于管理中心,軌跡點可以在管理中心電子地圖上回放以重現車輛的行駛程序,車輛行駛路線軌跡回放圖;
可查詢任意車輛、任意時間的車輛行駛情況,在電子地圖上對車輛的行駛情況進行歷史回放,可調節回放的播放速度及進度,
2.10 車輛作業監管系統
環衛車輛監管系統可以實作以下效果:
精細化管理作業路線,系統實時直觀反映作業車輛的作業進度、作業量、車輛位置等管理指標;
規范化管理作業程序,系統實時反映哪些路段按規范要求啟動了作業開關,哪些路段是空跑未作業,系統實時展現作業里程、行駛里程、作業油耗、行駛油耗等管理指標;(如下圖:車輛軌跡線中藍色的空駛軌跡,紅色為灑水車作業軌跡)
智能化考評作業結果,系統自動化統計其作業車輛的違規情況,如超速、越界、超時停泊、油耗例外等,并實時統計作業量,系統自動生成考核報表,給出評分結果,
2.10.1 作業程序實時監控
通過“物聯網”感知設備,實時監管車輛作業狀態,作業里程等26個專業環衛管理指標,對違規作業事件系統自動報警;
2.10.2語音調度
語音調度功能:中心通過系統,可以實時與分中心、司機語音通話調度,并且中心的語音系統還可以對任何一路調度通話記錄進行錄音備案,以備后期調取取證,
2.10.3作業(作業任務)進度實時分析
系統按日、周、月等任意時間段實時統計各項作業的作業進度,可通過儀表盤等圖形化方式進行直觀展示;
2.11油耗管理系統
2.11.1油耗監控實作方案
車輛油耗監控系統是通過在環衛車輛油箱加裝油量傳感器結合GPS資料自動分析車耗油情況,并以曲線圖的形式展示當天環衛車輛的油耗情況,同時可以按部門、車輛型別、車牌號、時間來統計每輛車某一天或某一段時間的油耗情況 ,包括加油量、加油地點、總耗油量、總行駛里程、百公里耗油等,并生成報表,系統設定油量變化閥值,出現油量例外自動報警,
2.11.2 油耗資料曲線
(1)通過車載油耗監測設備,實作車輛作業程序車輛油耗資料的實時采集和自動上傳,繪制實時油耗曲線,同時生成每日車輛作業里程及油耗報表,
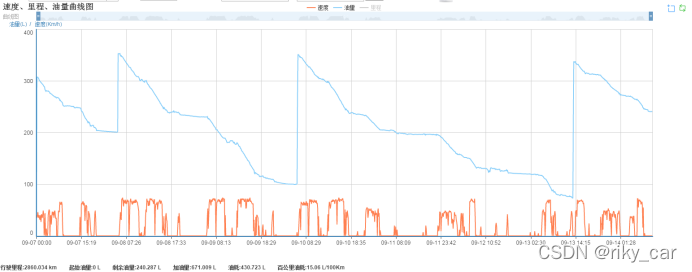
油耗曲線與運行軌跡聯動,可點擊油耗曲線上的例外點查看運行軌跡上相應點的位置、時間資訊,
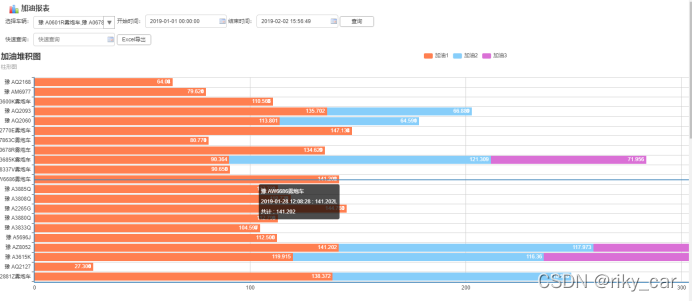
2.11.3 油耗資料報表
油耗分析:對車輛百公里油耗與實際油耗進行對比分析,對油耗例外進行在線報警,
加油報表:根據實時油量數值,系統自動生成加油記錄,并可與加油站實際加油記錄(手動錄入)比對,車輛在什么時間、什么地點、加了多少升油一目了然,柱狀圖與表格同時展示,更加直觀易懂,
-
-
- 輛燃油消耗分析
-
對車輛的油量消耗進行統計,可按公里、時間、使用單位分別對車輛燃油消耗進行匯總統計,
-
-
- 油耗報表分析
-
實時監控車輛的油耗變化,并生成歷史時段油量變化報表或油量曲線圖,直觀反映出油量的正常消耗與非正常消耗及加油數量不足等現象,達到油耗高水平管理,能夠準確的顯示加油地點和加油量,杜絕偷油現象,根據車輛百公里耗油情況推斷油量的使用情況,實時監控油箱油量變化,每月加油次數統計、加油量統計、加油時間統計、加油地點統計,漏油時間統計、漏油地點統計,漏油油量統計,
2.12報警管理系統
2.12.1 超速報警
對所監控的車輛進行超速報警設定,在車輛超速時進行報警,在設定超速報警時,可選擇車輛超速時立即報警,也可選擇持續一段時間后再進行報警,
2.12.2 路線報警
對所監控的車輛設定行駛路線,在車輛偏離設定的行駛路線、時間范圍、作業趟數、前往無關道路時進行報警,在設定報警條件時,可選擇車輛偏離時立即報警,也可選擇持續一段時間后再進行報警,
2.12.3區域報警
對所監控的車輛設定行駛區域,在車輛偏離設定的行駛區域時進行報警,在設定報警條件時,可選擇車輛偏離時立即報警,也可選擇持續一段時間后再進行報警,
2.12.4斷電報警
對所監控的車輛的車載終端發生斷電現象時,立即報警,
2.12.5 報警提醒
實時的報警提醒,當作業車輛漏油、超速、越界時以文字、聲音的形式提示管理人員,以及時的制止車輛的漏油等行為,
2.12.6 停車報警
可以設定禁止停車的區域,或是設定車輛準停點,對于非法在該位置停車、停車超時或怠速超時怠速時間的車輛進行監控,自動向管控中心發出告警,
2.12.7 緊急報警
當車輛發生緊急狀況時,比如發現例外狀況,或遇到搶劫或犯法犯罪行為,司機可以啟動緊急報警按鈕,按下報警專用鍵,設備以最大聲音發出報警聲或發出預定報警資訊給平臺,
2.12.8 其他報警
平臺還支持疲勞駕駛報警,路線偏移,區域限速等報警
2.13 環衛車輛遠程視頻監控
2.13.1 概述
該系統具有其他無線監控系統無法比擬的功能和特點,能夠保證環衛車輛移動程序的資料和音視頻的正常通訊,完全符合移動通信的的嚴格要求,是全數字化、智能化、網路化、系統化無線監控系統的典型代表,其主要作用是能夠將現場和指揮中心之間實時雙向傳輸文字資料、音頻、視頻,以提高指揮的準確性和及時性,
新一代移動視頻監控系統的移動特性是利用4G技術進行視頻資料的無線網路傳輸的新型系統,它采用了先進的視頻壓縮演算法H.264、流媒體視頻資料壓縮技術無線傳輸網路解決方案,整合了4G資料通訊功能和數字視頻編碼功能為一體化的便捷式的產品,它把攝像機影像經過視頻壓縮編碼模塊壓縮,通過智能無線通訊終端發射到4G網路,實作視頻資料的互動、發送/接收、加解密、加解碼,鏈路的控制維護等功能,根據應用,把實時動態影像及車載終端其他資料資訊(例如IC刷卡機和智能投幣機的票額)傳輸到距離用戶最近的聯通或移動通信網路,可以通過Internet從系統中控端得到實時影像資訊,該系統整合了4G網路和Internet網路的優勢,在空間和距離上產生突破性拓展,
2.13.2 環衛車輛作業情況實時視頻監控
通過給作業車輛安裝兩路3G/4G車載視頻監控,結合環衛車載一體機,監控中心可以實時監控清掃車、洗掃車、灑水車、路面養護車等作業車輛的作業質量情況,可有效減少監督人員上路抽查,可以有效杜絕司機作業不達標的情況,
同時通過車內安裝車載視頻可實時監控環衛車輛運行安全情況,對環衛車輛行駛程序中和停止程序中的情況均可以實時記錄,不僅可有效解決交通事故處理扯皮或偷盜等其他突發情況,為相關部門在處理突發情況提供有力的證據,
2.13.3實時視頻功能說明
實時獲取車載主機回傳的視頻信號,可以選擇播放時段,可以指定終端上傳指定時間段的視頻到系統中,視頻監控客戶端軟體支持視頻查看、錄像查詢、錄像下載、歷史視頻回放、支持車隊管理,
客戶端主要特點:
客戶端由監控器和播放器組成,監控器用于實時瀏覽、管理視頻,播放器用于播放存盤的視頻檔案,
監控器
使用監控器軟體登錄視頻服務器站點,能夠實作多畫面實時視頻瀏覽監控,同時提供多站點(服務器)登錄、視頻引數控制、PTZ控制、錄像控制、邏輯分組和分組輪跳等功能,
播放器
播放器軟體用于播放視頻保存檔案,支持快進、倒退、單幀等播放功能,方便事后仔細瀏覽、審核錄像檔案等,

客戶端主要特點:
(1)精心設計人性化用戶界面,操作方便、舒適;
(2)多站點(服務器)登錄、連接,實作資料高度共享;
(3)多畫面瀏覽,不同規格畫面監控,支持全屏多視窗、單視窗模式;
(4)用戶自定義鏡頭邏輯分組,并能分組輪跳瀏覽,輪跳時間可以設定;
(5)支持遠程錄像和錄像控制,可定時錄像,能鎖定螢屏;
(6)斷線重連,保障網路傳輸通暢,并可以設定最大網路延遲;
(7)支持對視頻編碼器引數的遠程控制;
(8)支持事件提示和報警輸出等;
2.13 環衛車載重管理
2.13.1 功能概況
通過稱重傳感器采集,平臺演算法處理計算出垃圾的重量,判斷裝貨趟次,作業線路,是否非法傾倒,

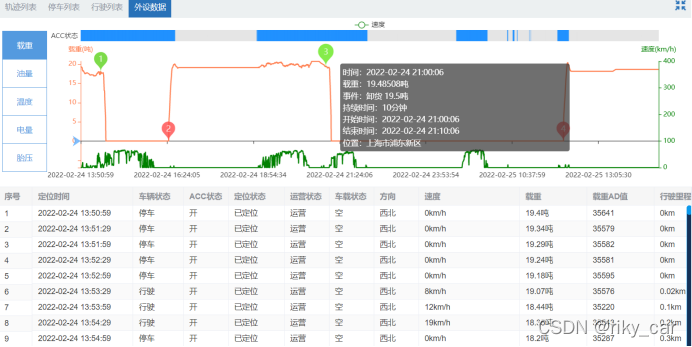
判斷運輸總量,運力統計

2.13.2 硬體
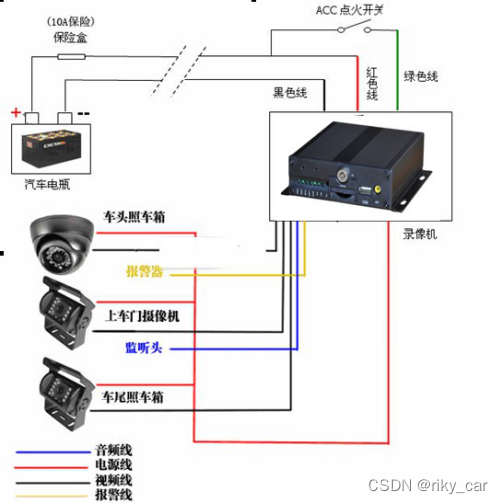
2.14車載終端智能硬體設備介紹
2.14.1環衛車載終端硬體架構:(如下圖)

轉速傳感器:用于機掃盤狀態檢測
水位傳感器:用于灑水車水位監控
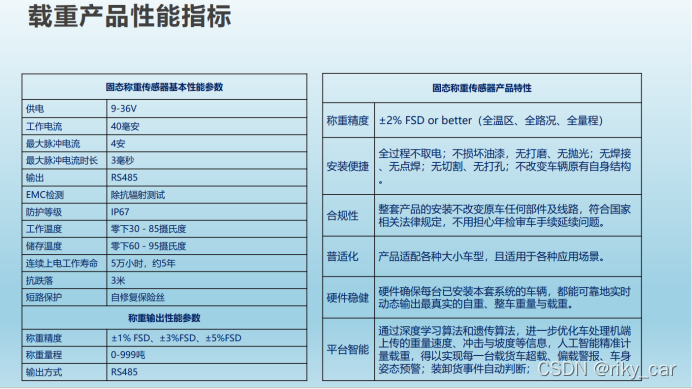
載重傳感器:用于垃圾清運載重監控 (可選)
射頻卡感應器:用于感應垃圾桶電子標簽、統計垃圾桶清收數量(可選)
注:以上車輛監控功能配置可根據不同的需求進行刪級訓增加
2.14.2 環衛車4G視頻監控主機
本公司的車載視頻監控行駛記錄終端產品,符合《道路運輸車輛衛星定位系統車載終端技術要求》、JT/T 808-2011《道路運輸車輛衛星系統車載終端通訊協議及資料格式》、GB19056-2012標準,
本產品集3G/4G視頻、汽車行駛記錄儀、車載定位監控于一體,能夠有效記錄車輛行駛資料(行駛速度記錄、事故疑點記錄、超時駕駛記錄),可對駕駛人員的作業質量有效監控,降低交通事故的發生,提高車輛運營水平,

2.14.3配件構成:

2.14.4 產品特征
1. 采用工業級元器件,非一般個人消費產品元器件
2. 特別為車載惡劣環境進行的獨特結構設計
3. 超級防震,超級耐熱穩定,超級寬電壓支持,劇烈碰撞(重大惡性意外事故仍可錄像,如:翻車,撞車)
4. 設計迷你小型化,外形設計豪華大方,定位高端
5. 金屬外殼帶鎖設計,安全保密,有效防止人為破外
6. 移動硬碟
7. 無機械磁盤結構,不是一般硬碟能夠比擬
8. 資料讀寫穩定方便;
9. 特別適合車載等惡劣環境;
10. 支持**64GB存盤;
2.14.5 功能描述
1.SD卡:取出和插入十分方便,
2.視頻錄像模式:點火錄像;開關門錄像;定時錄像;24小時錄像;關機延時錄像;開關門間隔錄像;熄火后錄像;碰撞錄像共八種供客戶選擇,
3.自動回圈錄像:32G的SD卡連續錄像CIF352X288解析度可儲存100小時,如選擇2張SD卡同時錄像則可存盤200小時,存盤空間滿后自動洗掉最老檔案,無須人工干預,
4.黑匣子功能:車牌號碼、日期時間、速度、剎車信號視頻疊加,當發生意外事故時,可**時間掌握清晰的駕駛證據,
5.聲音同步錄音:外接一個麥克風(拾音器),聲音視頻同步存盤(免費配置),
6.系統自動復位:瞬間斷電后,復電后迅速進入錄像狀態,無需人工干預,
2.14.6 產品引數
支持1張SD卡,GVSD04B 支持2張SD卡,本地存盤
視頻輸入 4路航空鏈接頭
視頻輸出 1路航空鏈接頭
作業電流 400mA
待機電流 20mA
聲音輸入 4路聲音輸入
電源輸入 9-36V(支持所有車型)
電源輸出 12V 2A
視頻制式 PAL
視頻速率 30fps,25fps,20fps,15fps,12fps,10fps等可調
影像壓縮格式 真正的H.264
視頻回放 1)主機可直接回放;2)用電腦回放軟體,可單路放大
存盤模式 支持4G,8G,16G,32G,64G SD卡
作業溫度 零下20度—70度高溫(俄羅斯和南非**均在使用)
錄像解析度 D1高清(720X576),HD1,CIF等解析度可調
報警輸入埠 4路(1路速度、1路剎車、1路開關門、1路點火),可修改
報警輸出埠 2路(可選)
通訊埠 RS232、RS485、RJ45、USB(可選)(可定制開發協議與其他外設等連接)
尺寸大小 141x150x41(mm)
重量 0.68(Kg)
2.14.7車載攝像機:
車載防水攝像機
產品特點 :
1. 采用原裝的CMOS ( 芯片 ) ,成像清晰,色彩還原度高;
2. 全金屬外殼,防水設計,裝在車外不會進水;
3. 紅外燈板采用獨特的恒流電路設計,可以有效的控制燈板的發熱量,延長紅外燈使用壽命;電流控制可以有效減少汽車蓄電池的損耗;
4. 采用優質的大功率紅外LED 制作光源,亮度高,壽命長;(日本多瓦紅外燈和臺灣鼎元紅外燈);
5. 攝像機鏡頭與紅外燈角度合理搭配,并經專業除錯,避免了出現影像中間亮,四周暗的情況(即行內常說的“ 手電筒現象”);
6. 攝象機各結合部位采用加固、抗抖動設計,不會因車輛抖動而發生角度偏移;
8. 采用韓國進口鏡頭, 保證攝像機的視角符合汽車的需要, 圖象更清晰;
9. 采用 5.0mm 的電源線方便安裝時接線 , 鏡頭座采用金屬鏡頭座利于散熱,
技術指標:
| 圖象傳感器 | 1/3〞CMOS |
| 有效像素 | 1280(水平)X960(垂直) |
| 信號系統 | PAL |
| 水平清晰度 | 1800TV lines |
| 信噪比 | More than 48db (AGC OFF) |
| 電子快門: | 1/50(1/60)至1/100000秒 |
| 視頻輸出: | 1.0Vp-p/75Ω |
| 鏡頭配置 | 韓國鏡頭2.8mm(115度)/3.6mm(90度) |
| 功率消耗 | DC12V 240mA |
| 紅外燈規格和數量 | ∮5燈(直徑5mm) 18PCS |
| 紅外燈功率 | 14mil(大功率) |
| 紅外燈照射距離 | 10M |
技術引數:
影像傳感器: sony CCD、
有效 像 素: PAL:752(水平)×582(垂直)
信號 系 統: PAL/NTSC制式
水平解晰度: 600TVL或700TVL 可選
同步 系 統: 內同步
信 噪 比: 48db
最低 照 度: 0 Lux /F1.2
快門 速 度: 1/50-1/100,00(秒)
白 平 衡: 自動跟蹤白平衡
紅外 距 離: 8-15M
角 度: 140°
標 尺: 無
紅外燈波長: 45 unit 840nM
使用 壽 命: 100,000小時
視頻 輸 出: 1.0Vp-p75Ω(BNC)
電源 配 置: DC 12V-24V
功率 消 耗: 12V=150mA,24V=220mA
外觀尺寸 :43/64.8mm
輸出方式 :CCIR/EIA(PAL/NTSC)標準視頻信號
功能特點: 防水防震,自動平衡增益控制,外部楨同步功能適合客車、卡車、拖車、救護車等車型后視及錄像監控.
- 人工保潔作業管理系統解決方案
3.1 概述
3.1.1 應用背景
隨著環衛作業人員數量的增加,管理部門對環衛作業人員的出勤率統計、作業狀態、指揮調動變得越來越難;傳統的環衛人員管理模式效率低下,面臨很多問題:如無法實時掌控工人的在崗情況及作業狀態、缺乏有效的作業資料;無法對工人進行有效考核;脫崗、滯留等違規行為;無法第一時間知曉;處理過的問題無法追溯,難以統計等,
基于以上原因本系統提出了全新的解決方案:本系統為所有環衛工人建立人員資訊臺帳,按照網格化管理思路劃分作業區域,為每個人制定作業規劃,規定責任區域、到崗時間、作業次數等指標,通過給每名人員配備的GPS定位模塊或電動車輛安裝的GPS終端,實時采集人員位置資料,根據人員位置資訊及進出作業區域內的時間,從而自動統計出環衛人員考勤資料,通過自動化的資料統計避免了人員作業規劃不合理、不按時到崗、越界辦私事、無故滯留、聚眾聊天等問題,
3.1.2 我們的解決方案
1、按照網格化管理思路劃分作業區域,為每個人制定作業規劃,規定責任區域、到崗時間、作業次數等指標,
2、通過給每名人員配備的GPS模塊或電動車輛安裝的GPS終端,實時采集人員位置資料,通過手機App和電腦后臺,可以隨時查看工人及車輛的位置分布和行進軌跡,工人在崗情況、作業狀態,一目了然,實作對人工保潔班組長、保潔中隊長、環衛所長的管理,
3、結合作業區域和相關監控指標實作對人員作業程序的實時監控、歷史作業軌跡回放、人員違規事件點查詢預警、作業規劃、考核評價等功能,
4、為工人設定排班、作業區域、作業圈數等,明確作業規范;對工人的出勤情況、作業資料、違規行為進行綜合統計,自動計算分數,
5、通過實時作業監控解決了人員作業規劃不合理、不按時到崗、越界辦私事、無故滯留、聚眾聊天等問題,通過自動化的資料統計避免了人為考核存在人情分、不公正的情況,
3.1.3 產品特色
改變人情管理,粗放管理,結果導向,問題發生后解決的傳統管理模式;形成系統管理、精細化管理、結果程序并匯總、問題根源防治的環衛管理新模式,
環衛工人攜帶智能定位卡,按照規范作業,實時上報作業資料,環衛部門和環衛公司的管理人員,使用電腦后臺和手機App,進行監督管理、問題指派,
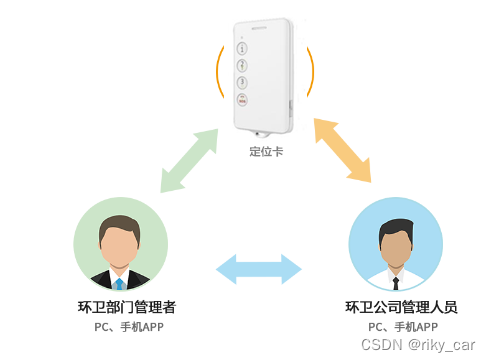
實時查看工人的位置分布,對工人及車輛的出勤數量、到崗情況一目了然,實時記錄工人的作業軌跡,清楚掌控工人的行進路線,停留情況,并可進行快速回放,只要幾分鐘,就可以快速掌握工人一天的行程關鍵點,
3.1.2軟體平臺功能說明
3.1.2.1 基礎資訊管理
建立人員檔案,登記人員姓名、職務、年齡、合同日期等資訊,實作對環衛所各類人員的資訊化管理,做到人員數量心中有數,防止虛報、瞞報、吃空餉,
通過系統對環衛保潔人員資訊統一管理,實作保潔人員的姓名、電話、部門職務、照片等資訊的電子檔案管理;還可以自定義組織結構,對保潔人員進行分層級、分型別管理;在后臺或App的地圖上,點擊任意工人頭像,可以查看該工人全部資訊,方便督查人員路面檢查快速了解工人情況,
3.1.2.2保潔隊伍作業規劃化管理
將“定人、定崗、定量、定責”“四定”管理機制固化到系統中,系統按“四定”制度自動運行,解決環衛人員規范作業難的問題,將所有在職人員,按照新的環衛作業要求合理設定崗位和工種,明確各崗位作業職責,并分別對不同崗位人員配置每天的作業任務量標準;杜絕在職不在崗、在崗又兼職現象,實作各級人員的責任到人、分片包干、風險共擔,系統不僅可以對佩戴手表的環衛作業人員進行監管,對使用手機的管理人員也可以進行監管,“四定”具體內容如下:
定人:給每個人員劃分工種,系統不僅可以對佩戴手表的環衛工人進行監管,對使用手機的管理人員也可以進行監管;
定崗:根據不同網格,不同路段的衛生特點和作業要求,可以設定不同的作業時間;通過對作業時間的管理,確保環衛作業全時覆寫、無縫對接,持續保持環境的干凈衛生,
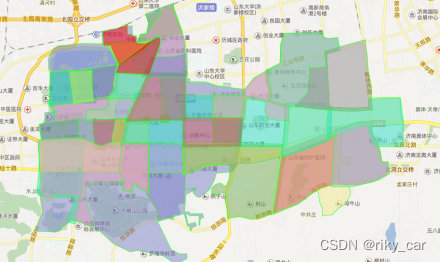
定量:城市以網格化進行多級劃分,為每個區域劃定不同的網格,還可以給每個作業人員設定不同的圍欄資訊,真正將作業職責落實到各級組織和個人,
定責:針對走保、快速保潔車、小掃地車等不同的路面清掃保潔作業工種,設定不同的作業路線和作業圈數、公里數標準,實作各環衛工種的自動作業,
3.1.2.3人員網格管理
根據管理需求建立環衛所網格、管理人員網格、班隊網格,
3.1.2.4人員責任區域規劃
系統平臺運用GPS技術及GIS地理資訊技術,采用SOA架構及JAVA編程語言,在電子地圖上規劃一線管理人員負責的責任區域,根據級別、型別為每個網格指定負責人、規定網格作業標準,在GIS地圖中,可顯示責任網格內的責任區域劃分,每個責任區域的負責人名稱,區域名稱,規劃內的巡查次數、到崗時間、巡查時長等資訊,
3.1.2.5 作業程序實時監控
系統通過GPS模塊設備上報人員的位置資料,并結合規劃的責任區域、上報時間實時監控一線管理人員的在崗情況,滯留時間,實時監控作業是否在規定的時間、指定的區域內進行作業,
3.1.2.6 位置監控
系統通過GIS地理資訊系統,實時記錄并展現一線管理人員的當前位置,系統在規定的上崗時間內,系統將至少每隔5秒即上報GPS模塊所在的地理位置,以此作為一線管理人員的所在位置,
通過手機App和電腦后臺,實時查看工人的位置分布,對工人及車輛的出勤數量、到崗情況一目了然,
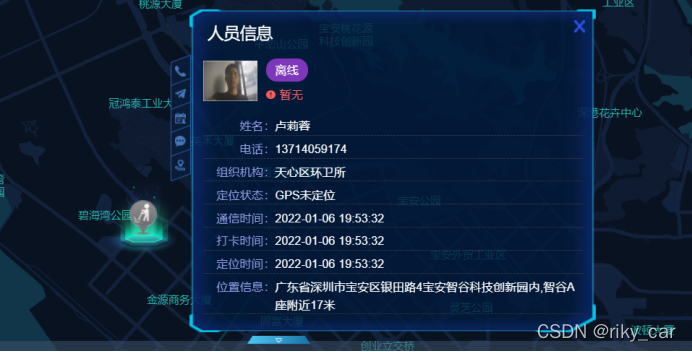
系統將通過GPS上報的資料資訊與一線管理人員所負責的區域相比對,從而判斷一線管理人員是否在崗、是否滯留、是否離崗,后臺管理中通過打開一線管理人員功能模塊進行實時監控,系統界面上即可實時顯示所有一線管理人員的當前位置,對于離崗、滯留人員,用特殊顏色顯示,根據設定的重繪時間,不斷更新巡查員的當前位置,系統平臺如果監測到一線管理人員處于違規狀態,如超時停泊、離崗等情況,系統會自動報警并形成考評記錄,
3.1.2.7程序監控
系統實時監控一線管理人員的作業路線、滯留時間,并可以按時間段對某個一線管理人員的運行軌跡進行作業路線軌跡回放、超時停泊點報警檢查等,如果一線管理人員在某一點停留時間過長,系統會報警并自動記錄,系統可以實時查看一線管理人員當天所有在崗資訊,系統顯示內容包括:離崗時間、離崗時長、離崗路線,可以在電子地圖上查看人員離崗后的軌跡,
3.1.2.8人員排班管理
強大的排班功能:班次設定靈活,可以細致到給每一個工人按上班和休假時間靈活設定排班表,能適配工人一天多個上班地點,多個作業時間段,排班表只需要一次設定進系統中,系統就能自動運轉,延期自動往后排班,不需要每日手動排班
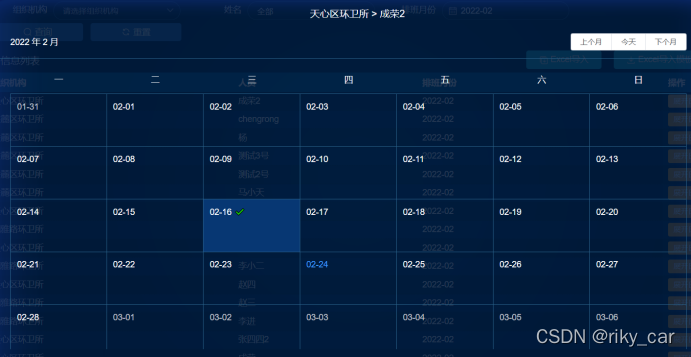
臨時休息、換班、加班也不用擔心打亂排班表導致全部重排和整理,只需要一鍵就能在讓工人上班狀態即使更改,系統考勤表自動調整記錄,真正減少管理壓力,
3.1.2.9人員違規監控
實時查看環衛作業人員脫離圍欄、違規停留等違規情況,環衛作業人員出現違規行為,系統自動告知管理人員,方便管理人員及時發現、及時處理,并可以自動形成違規臺賬,方便員工考核和問題追溯,
3.1.3環衛人員定位卡功能說明

3.1.3.1 產品特色:
BDS/GPS/LBS/Wi-Fi多重定位,定位更快更精準;
緊急呼叫,1個SOS鍵緊急呼叫;
無障礙考勤,2.4GHz RFID,一卡通消費;
語音報時,一鍵語音報時;
語音播報短信,預報最后一條短信;
智能開啟定位,定時、時間段、即時定位;
遠程聆聽,隨時聆聽現場聲音及對話;
1200mAh電池,待機長達7天;
防塵防水,防日常濺水及雨淋;
多種方式查詢位置,短信、客戶端、平臺,
3.1.3.2硬體規格 :
聆聽范圍:≤3m
按鍵: 上下班按鍵,電源按鍵,1個SOS鍵
GSM/GPS天線:內置
LED指示燈:GPS(藍色),GSM(綠色),Power(紅色)
電池:1200mAh/3.8V鋰聚合物電池
作業時間:7天(Wi-Fi定位,1分鐘上報一次)
待機電流:≤6mA
充電器:5VDC/1A
機身顏色:白色
機身尺寸:102.5(L)×62.0(W)×9.0(H)mm
重量:70g
作業溫度:-20℃至+60℃
- 監督考核管理系統
智慧環衛為政府,企業相關管理部門提供監督考核管理入口,通過平臺開放賬號,對企業環衛園作業進行監督考核,實作遠程管理,
4.1 考核標準設定管理
依據環境衛生管理處環境衛生實施考核標準,建立電子各項考核標準為考核臺帳基礎資料,管理考核標準資訊是實施監督管理的依據,用戶根據考核標準確定檢查考評型別,進行檢查考評,本模塊功能實作考核標準可配置化管理,用戶根據不同業務考核辦法,考核相應的業務進行情況,

4.2 市容巡檢
企業會每日指派巡檢人員對環衛園林的作業質量進行檢查,城管局和其它政府相關管理部門也可以定期對五家渠市的環衛園林作業質量進行巡檢,對于發現的問題,可通過平臺進行事件上報,指揮中心根據平臺上報的事件,調度班組指派人員進行處理,處理完成后將處理結果上傳平臺,進行反饋,
圖:作業流程圖
4.2.1 巡查任務管理
巡查任務可分為日常巡檢、集中巡檢兩種方式,系統可根據巡檢業務需求提前定制巡檢任務型別,包括:檢查單位機構、巡檢人員、巡檢型別、執行開始時間、執行結束時間、巡檢要求、創建時間,等格式內容,
圖:巡查任務管理

(一)巡查功能設定
巡查任務管理子系統可分為日常巡檢、集中巡檢兩種方式,系統可根據巡檢業務需求提前定制巡檢任務型別,
(二)巡查任務設定
檢查單位機構、巡檢人員、巡檢型別、執行開始時間、執行結束時間、巡檢要求、創建時間,等格式內容,可根據用戶需求定制研發各項表單格式,
圖:巡查任務設定
4.2.2 檢查任務監督管理
根據檢查任務的派發,同時結合定位技術,指揮中心可以隨時掌握巡查員的位置軌跡,并通過智慧環衛系統對巡查員的作業進行業務監督,從而保證檢查任務的保質量完成,
(一)巡查人員位置資訊
根據檢查任務的派發,同時結合定位技術,指揮中心可以隨時掌握巡查員的位置軌跡,
圖:巡查人員定位
(二)巡查人員調度
指揮中心可通過智慧環衛系統對巡查員的作業進行業務監督指揮,從而保證檢查任務的保質量完成,
4.3 案件處理
巡檢人員或者市民都可以向管理中心發起案件,案件經過監控中心管理人員,指派到處理單位和人員進行案件處理,處理前后,需要拍照上傳案件圖片,案件處理程序全程采用無紙化作業,處理后管理人員可以對相關單位進行打分,
指揮中心案件處理流程
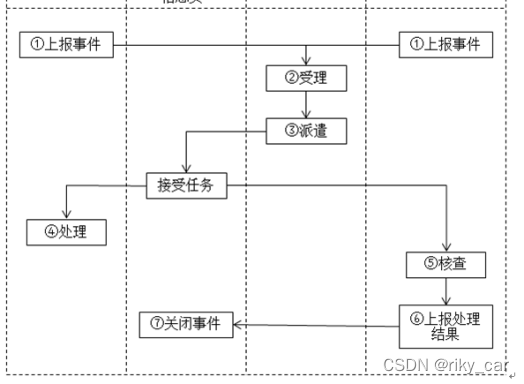
(一)事件上報
1、上報環衛事件的人:
指揮中心調度人員;
業務科及局領導;
市民來電舉報,
2、上報方式:
所有人員都可以通過電話上報事件,上報時通過電話告訴指揮中心的座席人員,座席人員將事件錄入系統;指揮中心調度員通過視頻發現問題直接截圖上報后,事件自動錄入系統,
3、記錄內容:
對于上報上來的事件,系統需要記錄如下內容:事件型別、事件內容、事件級別、地理位置坐標、地理位置描述、上報人、上報時間,如果是視頻上報的可以記錄視頻截圖,
(二)任務派遣
系統接收到上報上來的事件后,指揮中心調度人員將及時將事件派遣給相應的班組,班組接到任務后,會通知相關人員前去處理事件,
(三)任務調度
指揮中心調度人員發現事件后可以通過系統直接與相關班組進行對講,調度人員前去處理,也可以通過系統可以查看發生事件附近有哪些人和車輛,直接與附近人員進行對講,調度處理,
(四)事件處理
相關班組將事件處理完成后通環衛通將處理結果上報收到指揮中心,指揮中心可以通過系統,并對整個處理程序進行跟蹤,
(五)事件核查
指揮中心接到班組處理結果反饋后,對事件的處理結果進行核查,如果事件處理完畢,則關閉該事件,
(六)事件處理結案
指揮中心對班組反饋的事件核查后如果確實按要求處理完畢則進行結案,

垃圾收運管理系統
5.1 垃圾清運管理子系統概述
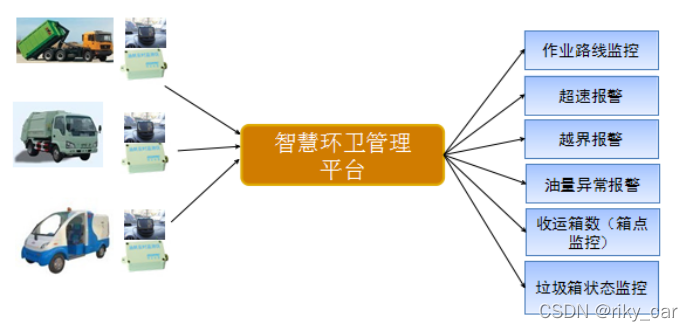
系統針對各城區的垃圾清運模式(直運、轉運),對壓縮車、擺臂車、收集車、勾臂車等清運車輛進行作業程序實時監管、解決城市道路兩側是否有垃圾堆集死角,嚴禁隨意傾倒垃圾的行為,對收運的垃圾筒數進行實時統計,對垃圾運輸車輛的考核結果自動生成,
針對所有擺臂車、壓縮車、收集車等垃圾清作業程序進行管理,實作車輛定位、清運程序實時監控、油耗監控、例外事件報警、統計分析等功能,
5.2 業務流程圖
5.3 垃圾收運系統功能設計
監控車輛出車收車情況、清運車行駛狀態、路線、在清運程序中有沒有超速、超時停車等違規情況、負責區域及清運任務完成情況、每天清運收集點的數量垃圾桶的清運狀態監管,能夠在GIS地圖上看到所有的垃圾桶當日清運狀態,對清運清運狀態及時預警、報警,
5.3.1作業規劃
系統主要是詳細規劃垃圾清運車輛所負責的垃圾箱、中轉站,并規定清運次數,為實時監控及考核評價提供依據,規劃垃圾清運路線,設定清運監控指標,按最優化的路線提前對清運路線進行規劃,同時設定其清運監控指標,如:清運次數,清運作業量,單車耗油數等,
系統根據垃圾箱所在區域人口數及垃圾日產量自動計算所需垃圾箱數,結合電子地圖將預分布情進行展示,為合理安排垃圾箱位置提供依據,
磁區域統計垃圾箱數量,估算垃圾量,根據每輛車清運載重量合理安排清運責任區域,計算車輛行進最優路徑,結合相關技術對垃圾箱的清運情況進行實時監控,實時反映每一個垃圾箱當前清運狀態,
5.3.2車輛位置監控
實時通過電子地圖定位清運車輛位置、通過不同圖示區分車輛各種運行狀態,可以實時查看車輛速度、方向、時間等資訊,
5.3.3 垃圾桶/箱資訊管理
對所轄區所有垃圾桶基礎資訊進行登記管理,包括所有相關屬性:材質、容量、負責人,等, 并在地圖上進行標注

5.3.4 清收程序監控
用車輛GPS結合垃圾桶位置資訊通過GIS自動計算垃圾桶收運情況,監控垃圾桶清運狀態,統計垃圾箱收運進度,用不同顏色圖示直觀區分已收及未收垃圾箱,在GIS地圖上看到所有的垃圾桶當日清運狀態,
垃圾箱上安裝電子標簽,清運時車桶對接,系統會接收倒桶車、轉運車設備所上傳的各類資料,并對資料轉運模式進行分析利用,系統可通過標記垃圾箱位置與倒桶車上報資料組成車點對應收運演算法,統計每天清運垃圾筒的箱數、次數等,亦可通過物聯網設備進行車卡感應,對每日清倒垃圾筒數、是否已清運等狀態進行實時監控,
系統在地圖上標識清運車輛的作業軌跡,在軌跡線上可準確標識出所違規清運作業事件點,并可基于地圖對作業程序進行回放,

系統通過標記垃圾箱位置與作業車上報資料組成車點對應收運演算法,統計每天清運垃圾筒的箱數、次數等,亦可通過物聯網設備進行感應,對每日清倒垃圾筒數、是否已清運等狀態進行實時監控,精確統計垃圾清運進度,通過對垃圾桶及垃圾運輸車安裝“物聯網”感知設備,實時統計哪些垃圾桶已被清收,哪些垃圾桶還未清收,
圖:清運車輛作業監控
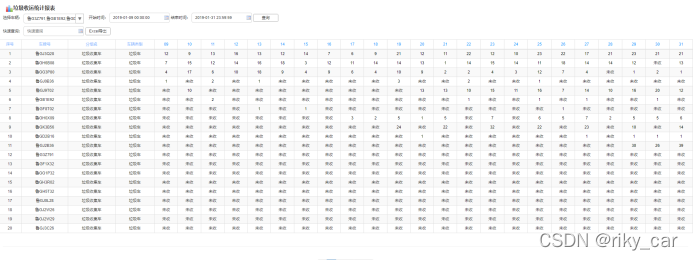
5.3.5 清運箱數統計
根據清運進度自動統計清運車輛清運次數、清運時間,同時與車輛作業量結合統計車輛出車情況、行駛里程,
通過軌跡回放可以隨時查看每輛車任意一天的歷史作業情況,在回放程序中在系統地圖中可以看到查看車輛的行駛軌跡,點擊車輛回放軌跡中的每一個點,都可以查看到車輛在該點的時間點、速度、方向等資訊,在軌跡回放程序中,支持1x、2x、3x回放速度,也可以在軌跡回放時間條中直接點擊時間點進行回放,
當在車輛監控頁面展示環衛車輛作業線路時,點擊具體某條線路,可以彈出該線路上最新的車輛運行詳情,可以直觀的看到該線路上的車輛是否按照規劃行駛,
5.3.6 違規收運監控
按照事前制定的清運作業規劃,通過前端安裝在作業車輛上的車載設備,能自動監控車輛是否按規范作業,在車輛沒有按照規劃中的作業時間、清運路線、清運設施、垃圾場、中轉站等要求進行作業的,系統有報警資訊提示,同時自行按照考評,
垃圾清運作業監控系統對清運車輛作業情況進行監控,如果車輛沒有按照規劃中的作業時間、清運路線、清運設施、垃圾場、中轉站等要求進行作業,系統有報警資訊提示,同時自行按照考評規定進行扣分,
違規情況包括:
沒有在垃圾的目標清運位置作業
在作業規劃中可以規定垃圾的目標清運位置,如果沒有在垃圾的目標清運位置作業系統將報警,
沒有在規定的時間內完成要清運的垃圾桶數
系統會在每個規劃中規定清運指標,垃圾桶數、進出中轉站次數等,系統檢測到沒完成作業的立即進行報警,并記錄車輛未完成作業趟數,對于某段道路上的清運時間間隔要合理,
未按規定的清運路線行駛作業,
為車輛的作業預先設定路線,車輛作業沒有按照路線行駛,系統報警,并記錄違規行駛次數,
5.3.7 收運桶數資訊查詢
對每天收運的垃圾筒數量、位置、清收地點、責任人等資訊進行統計分析,并可按時間段、按清收點或其它查詢條件進行相關資訊的查詢,
違規清運事件統計與分析
對每日違規清運事件如未按時清收的垃圾箱位置、清運車輛未進處理廠或中轉站等事件按事件的嚴重程式進行統計與分析,形成查詢分析報表,
歷史收運資訊查詢
可對歷史的收運資訊按時間段,按清收地點、按責任人等條件進行查詢統計,
5.4 系統硬體說明
5.4.1 垃圾桶、垃圾箱RFID電子標簽讀寫器
- RFID電子標簽讀寫器產品簡介
通過在垃圾桶安裝垃圾桶(箱)RFID電子標簽讀寫器,在垃圾回收車安裝感應裝置,垃圾回收車在進行垃圾桶垃圾回收作業時可自動感應到垃圾桶電子標簽ID及相關屬性資訊,并結合GPS定位系統實作對垃圾桶位置布局、清收程序監管及清收結果量化考核


YHT-LA660垃圾桶垃圾箱RFID電子標簽讀寫器是一款具有中距離讀寫能力的一體化超高頻讀寫器,內置中尺寸5Db可以定制5Db圓極化增益天線,含有射頻(RF)模塊、數字信號處理模塊、輸入/輸出埠、觸發輸入等,可通過RS232、RS485和韋根26(34)連接上位機,也可選輸出(繼電器輸出和網口輸出)實作中距離、單個無源RFID標簽的讀寫操作,
YHT-LA660讀寫器支持EPC global的 class1 gen2 (ISO18000-6C)協議國際標準,能讀寫Ucode、Ti、Impinj、Alien等標簽,并針對主要應用的標簽芯片進行了性能優化,可正常穩定讀取5米以內移動時速不超過100公里的RFID無源標簽,遠端讀寫距離最遠可達3米以上,采用IP-65防護標準設計,可在室外場所安裝使用,
- 、性能特點
1、符合EPC CLASS 1 GEN 2和ISO 18000-6C技術標準
2、3米的穩定讀寫距離,真正實作中遠距離、快速讀取
3、可以通過通訊介面設定發射功率,調節讀寫距離,適應復雜的現場要求
4、可調整配置引數,適時上傳單標簽讀寫資料
5、讀寫器設計有一路觸發輸入,可以在外部觸發事件發生時識別標簽,滿足綠色環保要求和降低能源消耗,適用于停車場和生產流水線等多種場合管理應用
6、讀寫器內設計有外部非易失存盤空間,在封閉應用系統中,可以預先將本系統發行的標簽ID存盤在存盤器中,當讀寫器識別到標簽ID后與本機存盤的ID進行比較,依據比較的結果執行讀寫器預定義或用戶設計的動作,
7、采用高標準的元器件,寬溫設計,保證各項引數穩定一致
- 技術引數:
(1)外形尺寸:130*130*40mm
(2)產品重量:0.26Kg
(3)防護標準:IP-65
(4)作業環境:溫度-30℃ ~ 70℃ ,濕度5% ~ 90% 無冷凝
(5)儲存環境:溫度-40℃ ~ 80℃
(6)作業電源:DC12V 25W配接器(AC220, 50Hz轉換)
(7)作業頻率:902~928MHz(可調整),跳頻(FHSS)或定頻發射方式作業
(8)發射功率:最大30dBm可調
(9)通訊介面1:RS232、RS485、韋根26
(10)通訊介面2:繼電器、網口輸出/RJ45(TCP/IP可選配,可定制WIFI等)
(11)觸發介面:1個輸入口
(12)無線介面:EPC CLASS 1 GEN 2 標準
(13)讀寫模式:單卡(標簽)模式,讀寫速度<0.1秒
(14)標簽位移速度:≤100公里/小時
(15)最遠讀卡距離:5米以上(單張標簽AZ9662讀取)
(16)推薦讀卡距離:3米(單張標簽AZ9662讀取,穩定標準以此距離為準)
(17)定向讀卡區域:參照配置的天線方向圖
(18)配置天線:內置5dBi圓極化增益天線902-928MHZ
5.4.2 垃圾桶RFID電子標簽
- 特點:
1. 采用耐高溫工程塑料封裝,
2. 可在不同介質的場合應用,
3. 防水防塵,耐用,使用方便,
4. 可封裝多種頻段的芯片,
5、應用范圍:本長短條系列標簽,設計為抗金屬反射干擾的 UHF 頻段電子標簽,本電子標簽可以在任何的介質表面(包括金屬)進行安裝,
- 技術引數:
(1)材料 耐高溫工程 ABS 塑料
(2)顏色 灰黑色
(3)重量 長條:48±0.2g、短條:21.7±0.2g
(4)封裝尺寸 長條:155×32×10±0.2mm、短條:79×31×9.5±0.2mm
(5)芯片型號 G2XM

- 設施/場站管理
環衛管理系統對垃圾中轉站,公廁,渣土消納場等站點進行管理,
6.1 場站采集
采集人員通過手機定位對站點進行采集,采集輸入站點的型別,站點的位置,電子圍欄等
6.2 場站調度
6.2.1 中轉站視頻監控
實時視頻播放:播放可以選擇1、2、4、6、9、12、16、25視窗播放,播放功能按鈕包括:播放/暫停、停止、抓拍、音量調節/靜音、快退、快進以及語音對講,可以通過垃圾站名稱/編號查詢,也可以通過組織機構選擇目標垃圾站進行視頻播放,
云臺及焦距控制:控制云臺上下左右轉動、焦距增減、光圈增減調解,
視頻回放:選擇條件包括:起止時間、視頻路數,播放功能按鈕包括:播放/暫停、停止、抓拍、音量調節/靜音、快退、快進,并提供下載功能,
通話:點擊撥號可以實作與中轉站作業人員通話
6.3 中轉站運營統計
對站點的進入的車輛,噸位進行統計,監控中轉站使用情況
查詢條件包括:單位、中轉站編號/名稱,(每一項都可單獨查詢)統計時間按日、周、月、季、年,也可以按時間段選擇,選擇始末,
統計內容包括:稱重總數、進出車輛數量、臭味平均值、耗電量、
6.4 設施管理
管理各個垃圾桶,果皮箱,勾臂箱等設施,通過APP采集位置上傳,對某些設施配備電子標簽,
環衛解決方案:參考CarEye 管理平臺體驗網址:https://www.liveoss.com:7000
體驗賬號: admin 密碼:careye
CarEye 開源網址 www.careye.cn
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/433238.html
標籤:其他