# 3D model points.
MODEL_POINTS_68 = np.array([
[-53.30021857, -15.27635071, 60.43970857],
[-52.85842643, -1.810875, 59.18390214],
[-51.25744357, 11.67454214, 58.42188571],
[-48.626315, 24.63487214, 57.20655286],
[-43.58355, 36.41352214, 53.98811286],
[-35.42554, 46.354015, 48.35620143],
[-25.24848857, 54.04395214, 39.57465214],
[-13.64442429, 59.62245214, 28.96935357],
[ -0.80573857, 61.05416214, 25.76168714],
[ 11.60732, 59.40927786, 30.09232929],
[ 22.44441643, 53.81683, 40.08901643],
[ 32.24683929, 46.23280714, 48.37045 ],
[ 40.083355, 36.30976214, 53.26906357],
[ 45.11549929, 24.19315786, 55.59597786],
[ 47.84661071, 11.00381857, 56.59250643],
[ 49.47115857, -2.32260857, 57.92187643],
[ 50.10645643, -15.67903571, 60.06320429],
[-44.53299214, -29.24790071, 36.57320143],
[-37.510265, -35.96803857, 31.583005 ],
[-27.87970214, -38.27258143, 26.70722214],
[-18.03538357, -37.58489857, 21.67254214],
[ -9.18749714, -34.48015571, 17.84333 ],
[ 7.73560929, -34.98320857, 17.78346857],
[ 17.05676643, -38.20546071, 21.16640143],
[ 26.50843214, -38.83083714, 25.66079071],
[ 35.68873143, -36.34843286, 30.21249643],
[ 42.01933429, -29.83979571, 34.68843286],
[ -0.40917357, -24.128035, 16.83373214],
[ -0.30141, -16.12798571, 11.28371929],
[ -0.16755643, -8.23575357, 5.47430286],
[ 0., 0., -0. ],
[-10.55176571, 1.85589643, -14.38000214],
[ -5.12874214, 3.39399214, -16.81191714],
[ 0.39708571, 4.68778571, -18.53174857],
[ 5.90892786, 3.32928929, -16.92552929],
[ 10.86739357, 1.88789, -14.89868357],
[-32.89092143, -26.76529357, 5.027135 ],
[-26.91049143, -30.52179286, 2.15801214],
[-19.91704, -30.50822643, 0.96687786],
[-14.03447714, -26.25338714, -0.07934857],
[-20.194975, -25.09606643, -0.105195 ],
[-27.20172714, -24.94217357, 1.05472286],
[ 13.76133429, -26.45164714, -0.47553286],
[ 19.92442214, -30.95888929, 0.1769 ],
[ 26.74109214, -30.79344429, 1.21173929],
[ 32.26486071, -27.20465357, 3.49583071],
[ 27.28318143, -25.38001714, 0.202115 ],
[ 20.54642071, -25.34592071, -0.837625 ],
[-20.65447643, 20.43765429, -1.60022143],
[-12.52371, 15.83727643, -11.38166786],
[ -4.77470714, 13.59217929, -16.15096786],
[ 0.27214357, 14.80079857, -16.96316929],
[ 5.98245929, 13.59675714, -16.22999643],
[ 13.48329857, 15.99579214, -11.150485 ],
[ 20.56743714, 20.05708857, -2.29813786],
[ 13.61255286, 25.92732, -10.70571214],
[ 6.39741071, 28.31041071, -16.110175 ],
[ 0.272535, 28.85403357, -16.85116143],
[ -5.30635357, 28.454575, -16.00436143],
[-12.97188143, 26.19849929, -10.80136214],
[-17.41249286, 20.48412214, -3.41834571],
[ -4.92688071, 18.19712571, -14.92410143],
[ 0.24333071, 18.58162071, -15.87177071],
[ 6.03194429, 18.09014143, -15.01822857],
[ 17.48176643, 20.23072, -4.08055429],
[ 6.03511857, 21.85444, -14.76534929],
[ 0.14665857, 22.43481286, -15.64547857],
[ -5.14161857, 22.03205429, -14.52001571]], dtype=float)
class PoseEstimator:
"""Estimate head pose according to the facial landmarks"""
def __init__(self, img_size=(192, 256)):
self.size = img_size
self.landmarks_general_68 = MODEL_POINTS_68
# self.focal_length = 962
self.focal_length = self.size[1]
self.camera_center = (self.size[1] / 2, self.size[0] / 2)
self.camera_matrix = np.array(
[[self.focal_length, 0, self.camera_center[0]],
[0, self.focal_length, self.camera_center[1]],
[0, 0, 1]], dtype=float)
# Assuming no lens distortion
self.dist_coeefs = np.zeros((4, 1))
# Rotation vector and translation vector; 原代碼給它設定了初值,不知道怎么來的?
self.r_vec = np.array([[0], [0], [0]], dtype=float)
self.t_vec = np.array([[0], [0], [0]], dtype=float)
def get_euler_angle(self, rotation_vector):
# calc rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transform to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
# pitch (x-axis rotation)
t0 = 2.0 * (w*x + y*z)
t1 = 1.0 - 2.0*(x**2 + y**2)
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w*y - z*x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w*z + x*y)
t4 = 1.0 - 2.0*(y**2 + z**2)
roll = math.atan2(t3, t4)
return pitch, yaw, roll
def solve_pose_by_68_points(self, image_points):
print(self.landmarks_general_68.shape)
print(image_points.shape)
success, rotation_vector, translation_vector = cv2.solvePnP(
self.landmarks_general_68,
image_points,
self.camera_matrix,
self.dist_coeefs,
rvec=self.r_vec,
tvec=self.t_vec,
flags=cv2.SOLVEPNP_ITERATIVE,
useExtrinsicGuess=True)
#flags=SOLVEPNP_EPNP)
print(success)
print(self.r_vec)
return rotation_vector, translation_vector
if __name__ == "__main__":
img = cv2.imread(IMAGE_PATH)
img = cv2.resize(img, (192, 256))
landmarks_load = json.load(open(LANDMARKS_ROOT, 'r'))
landmarks_98 = get_landmarks(IMAGE_PATH, landmarks_load)
landmarks_98 = np.array(landmarks_98, dtype=float)*4
landmarks_68 = get_68from98(landmarks_98)
pose_estimator = PoseEstimator(img_size=img.shape)
rotation_vector, translation_vector = pose_estimator.solve_pose_by_68_points(landmarks_68)
pitch, yaw, roll = pose_estimator.get_euler_angle(rotation_vector)
def _radian2angle(r):
return (r/math.pi)*180
Y, X, Z = map(_radian2angle, [pitch, yaw, roll])
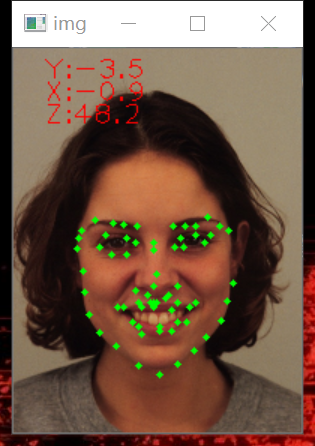
line = 'Y:{:.1f}\nX:{:.1f}\nZ:{:.1f}'.format(Y,X,Z)
print('{},{}'.format(os.path.basename(IMAGE_PATH), line.replace('\n',',')))
print('yaw:{}, pitch:{}, roll:{}'.format(yaw, pitch, roll))
print('Translation vector:{}'.format(translation_vector))
由于字數限制,其他繪圖和前處理函式就沒有貼出來了。
參考https://blog.csdn.net/ChuiGeDaQiQiu/article/details/88623267,我使用cv.solvePnP函式基于68點2D標準3D人臉,和98點預測到的2D關鍵點,估計人臉的姿態。
其中對標準模型進行了尺度縮放(到與圖片中平均人臉大小相近),坐標軸方向變換(x:左負右正,y:上負下正,z:遠正近負),坐標原點變換(點[30],鼻尖點);將98點2D點折算成了68點。焦距根據鏡頭引數進行了估算,其他相機內參都保留了原文的設定。
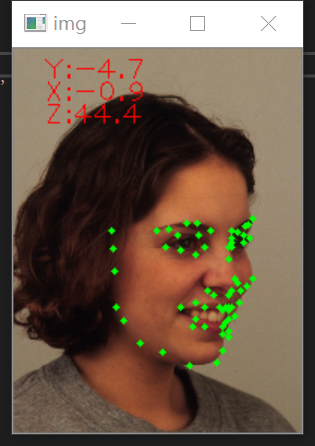
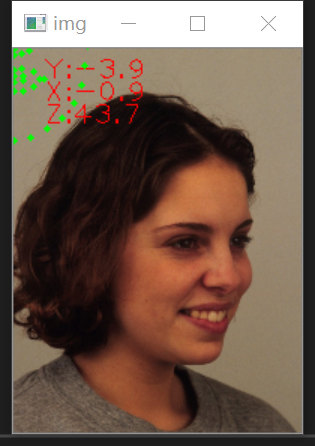
但是測驗時,不管輸入的是正面臉還是側面臉,輸出的結果都只有細微的變化,且明顯錯誤;嘗試更改焦距或者回傳原本的68點3D模型,結果會發生較大變化,但依然不會對實際輸入的變化起反應。
即便是直接使用68點3D模型中的xy維作為輸入,獲得的結果也不對。
感覺函式沒有起到預期的計算效果。請問是哪里出了問題?麻煩大佬幫忙看下~有用過這個函式的最好了,希望不是只有我一個碰到這個問題

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/43381.html
上一篇:[求助] UIAUTOMATION editcontrol寫入的檔案名被WIN10提示無效,但手動輸入同樣的可以