文字版如下:
摘要: Learn Right Now, Prepare For Future
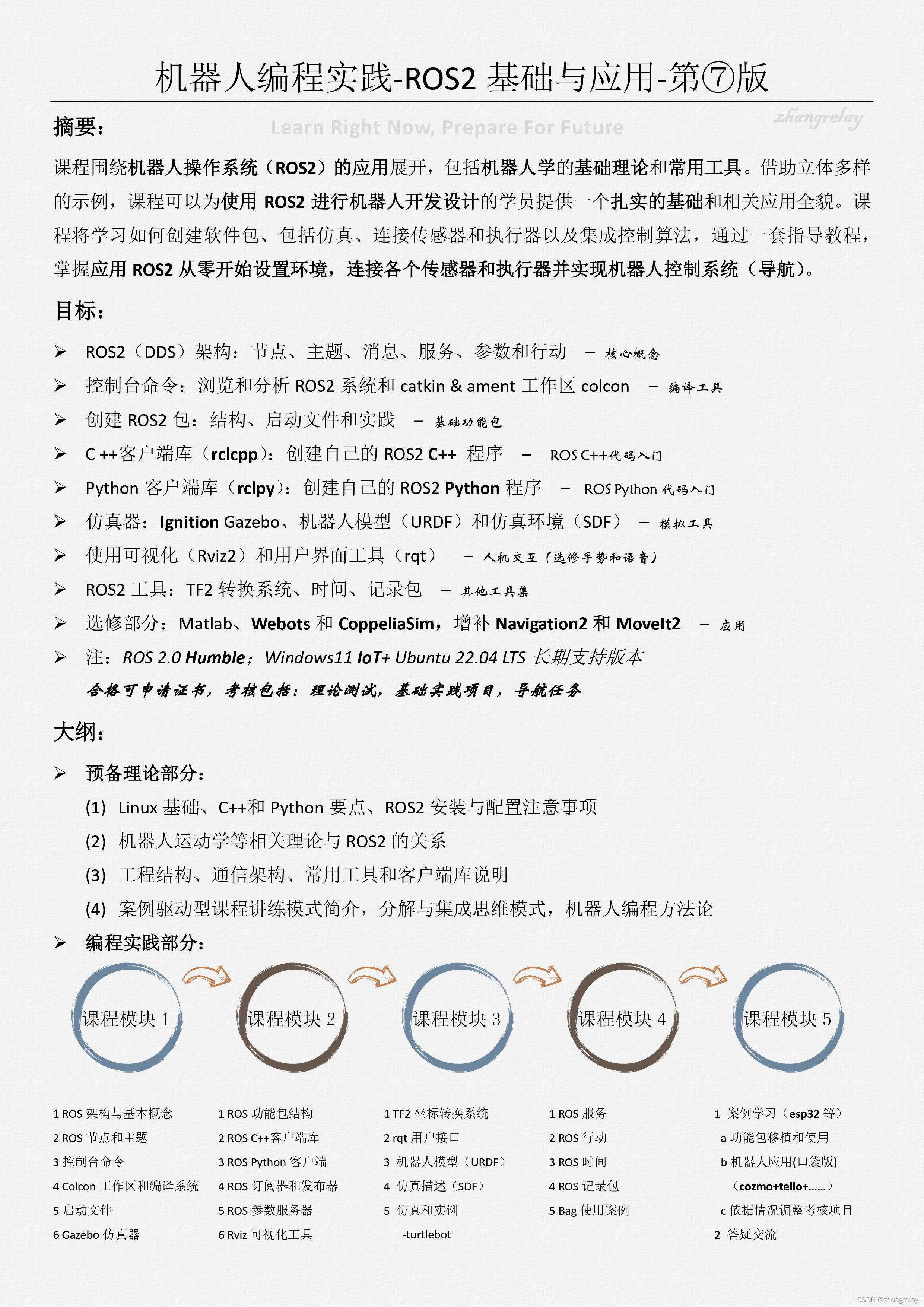
課程圍繞機器人作業系統(ROS2)的應用展開,包括機器人學的基礎理論和常用工具,借助立體多樣的示例,課程可以為使用ROS2進行機器人開發設計的學員提供一個扎實的基礎和相關應用全貌,課程將學習如何創建軟體包、包括仿真、連接傳感器和執行器以及集成控制演算法,通過一套指導教程,掌握應用ROS2從零開始設定環境,連接各個傳感器和執行器并實作機器人控制系統(導航),
目標:
- ROS2(DDS)架構:節點、主題、訊息、服務、引數和行動 – 核心概念
- 控制臺命令:瀏覽和分析ROS2系統和catkin & ament作業區colcon – 編譯工具
- 創建ROS2包:結構、啟動檔案和實踐 – 基礎功能包
- C ++客戶端庫(rclcpp):創建自己的ROS2 C++ 程式 – ROS C++代碼入門
- Python客戶端庫(rclpy):創建自己的ROS2 Python程式 – ROS Python代碼入門
- 仿真器:Ignition Gazebo、機器人模型(URDF)和仿真環境(SDF) – 模擬工具
- 使用可視化(Rviz2)和用戶界面工具(rqt) – 人機互動(選修手勢和語音)
- ROS2工具:TF2轉換系統、時間、記錄包 – 其他工具集
- 選修部分:Matlab、Webots和CoppeliaSim,增補Navigation2和MoveIt2 – 應用
- 注:ROS 2.0 Humble;Windows11 IoT+ Ubuntu 22.04 LTS長期支持版本
合格可申請證書,考核包括:理論測驗,基礎實踐專案,導航任務
大綱:
- 預備理論部分:
- Linux基礎、C++和Python要點、ROS2安裝與配置注意事項
- 機器人運動學等相關理論與ROS2的關系
- 工程結構、通信架構、常用工具和客戶端庫說明
- 案例驅動型課程講練模式簡介,分解與集成思維模式,機器人編程方法論
- 編程實踐部分:
|
課程模塊1 |
|
1 ROS架構與基本概念 2 ROS節點和主題 3控制臺命令 4 Colcon作業區和編譯系統 5啟動檔案 6 Gazebo仿真器 |
|
課程模塊2 |
|
1 ROS功能包結構 2 ROS C++客戶端庫 3 ROS Python客戶端 4 ROS訂閱器和發布器 5 ROS引數服務器 6 Rviz可視化工具 |
|
課程模塊3 |
|
1 TF2坐標轉換系統 2 rqt用戶介面 3 機器人模型(URDF) 4 仿真描述(SDF) 5 仿真和實體 -turtlebot |
|
課程模塊4 |
|
1 ROS服務 2 ROS行動 3 ROS時間 4 ROS記錄包 5 Bag使用案例 |
|
課程模塊5 |
|
1 案例學習(esp32等) a功能包移植和使用 b機器人應用(口袋版) (cozmo+tello+……) c依據情況調整考核專案 2 答疑交流 |
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/437519.html
標籤:AI