人工智能——深度學習
- 深度學習與機器學習的關系
- 深度學習怎么來的
- 淺層學習(Shallow Learning)
- 感知機
- BP演算法(誤差反向傳播演算法)
- 支持向量機
- 深度學習(Deep Learning)
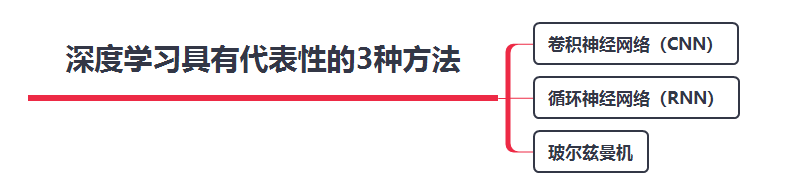
- 深度學習的方法
- 卷積神經網路(CNN)
- 回圈神經網路(RNN)
- 玻爾茲曼機(BM)
深度學習是機器學習研究中的一個新的領域,其動機在于建立、模擬人腦進行分析學習的神經網路,它模仿人腦的機制來解釋資料,例如影像,聲音和文本,深度學習是無監督學習的一種,
深度學習與機器學習的關系
可以理解為應用了多層神經網路的機器學習,就是深度學習,(中間層2層,加上輸入輸出層,共4層)
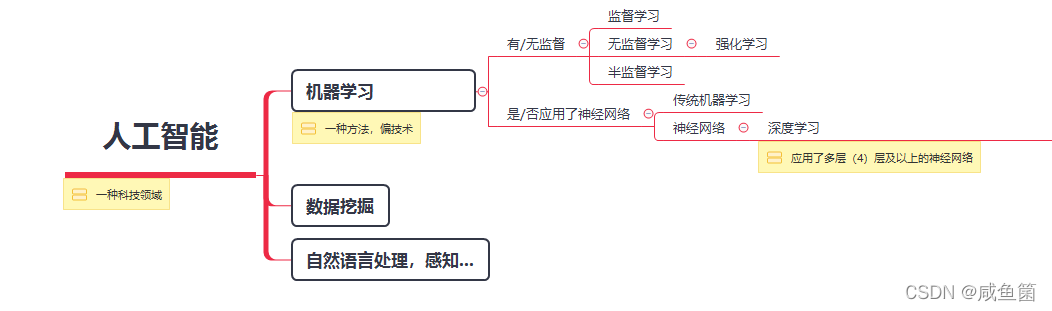
深度學習的概念源于人工神經網路的研究,含多隱層的多層感知器就是一種深度學習結構,深度學習通過組合低層特征形成更加抽象的高層表示屬性類別或特征,以發現資料的分布式特征表示,
深度學習怎么來的
從機器學習的模型結構層次來分,機器學習經歷了兩次浪潮:
- 淺層學習(Shallow Learning):機器學習第一次浪潮
- 深度學習(Deep Learning):機器學習第二次浪潮
2006年,加拿大多倫多大學教授、機器學習領域的泰斗Geoffrey Hinton和他的學生Ruslan
Salakhutdinov在《科學》上發表了一篇文章,開啟了深度學習在學術界和工業界的浪潮,
這篇文章有兩個主要觀點:
1)多隱層的人工神經網路具有優異的特征學習能力,學習得到的特征對資料有更本質的刻畫,從而有利于可視化或分類;
2)深度神經網路在訓練上的難度,可以通過“逐層初始化”來有效克服,在這篇文章中,逐層初始化是通過無監督學習實作的,
區別于傳統的淺層學習,深度學習的不同在于:
1)強調了模型結構的深度,通常有5層、6層,甚至10多層的隱層節點;
2)明確突出了特征學習的重要性,也就是說,通過逐層特征變換,將樣本在原空間的特征表示變換到一個新特征空間,從而使分類或預測更加容易,
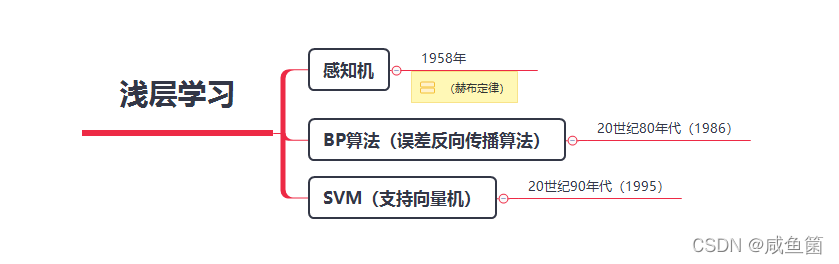
淺層學習(Shallow Learning)
感知機
在第一次人工智能浪潮時,弗蘭克.羅森布拉特(Frank.Roseblatt)1957年有了“感知機”的構思,他將‘’人工神經元‘’ 與心理學家唐納德·赫布與1949 年發表的赫布定律構思結合在了一起,
赫布定律描述了突觸可塑性的基本原理,即突觸前神經元向突觸后神經元的持續重復的刺激可以導致突觸傳遞效能的增加,
簡單說就是:“突觸前后的神經元在同一時間被激發時,突出聯系會加強,”
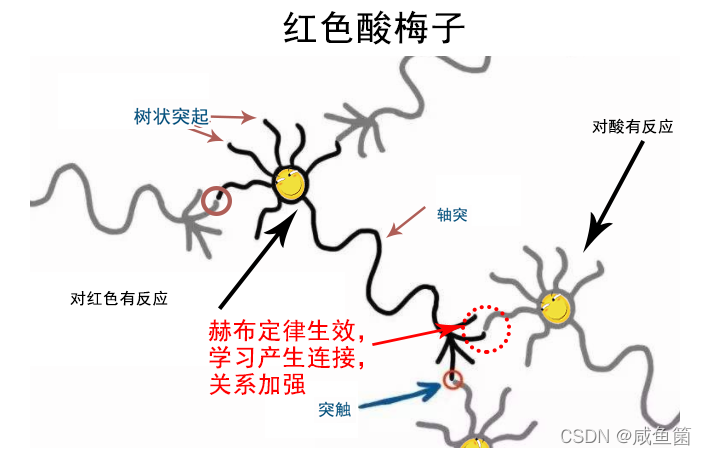
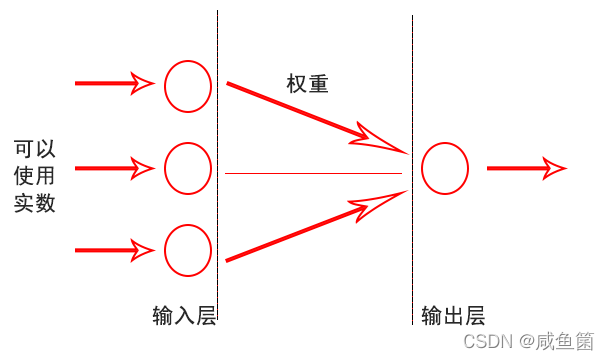
利用赫布定律,將神經元的結合轉變成數理模型的就是“感知機”,感知機是將人工神經元排列成兩層聯系在一起的構造,
在感知集中可以使用實數,通過調整結合強度(權重),感知機漸漸學會了監督學習 ,
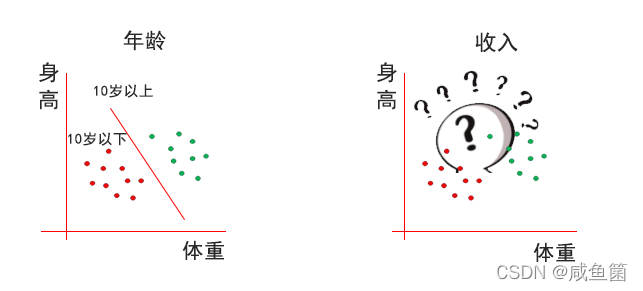
感知機局限
比如線性不可分,感知機不能處理一條線無法分割的資料,
BP演算法(誤差反向傳播演算法)
誤差反向傳播演算法(英:Backpropagation algorithm,簡稱:BP演算法)是一種監督學習演算法,常被用來訓練多層感知機,
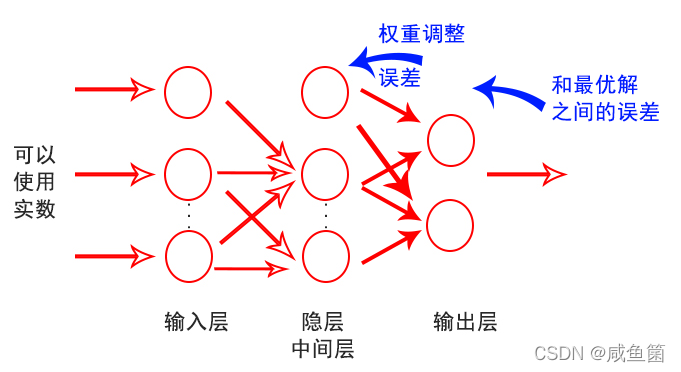
BP演算法的特征是將誤差反向傳播
在計算機沒有得出正確答案或者是偏離期待數值時,BP演算法可以將誤差從輸出層反向傳回,糾正各個神經元的錯誤,從而減少誤差,
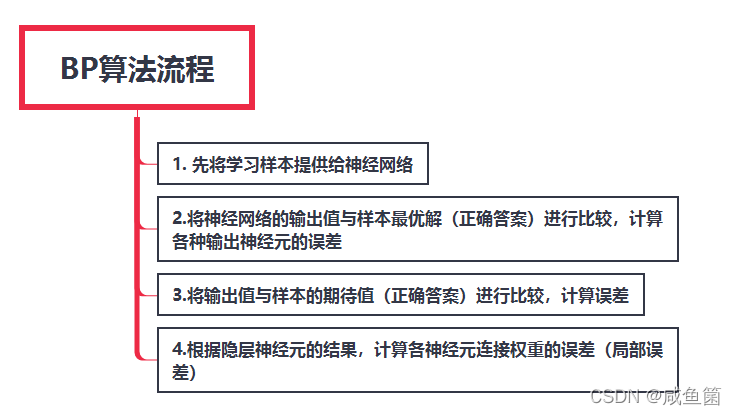
BP演算法通過上述順序來調整權重誤差,這樣可以解決雙層感知機無法解決的“非線性分離問題”
支持向量機
支持向量機(Support Vector Machine,SVM)是Corinna Cortes和Vapnik等于1995年首先提出的,它在解決小樣本、非線性及高維模式識別中表現出許多特有的優勢,并能夠推廣應用到函式擬合等其他機器學習問題中,用于模型識別的監督機器學習演算法
在間隔最大化的構思下,向量機不僅僅泛化能力高,而且擁有十分優秀的模型識別能力,
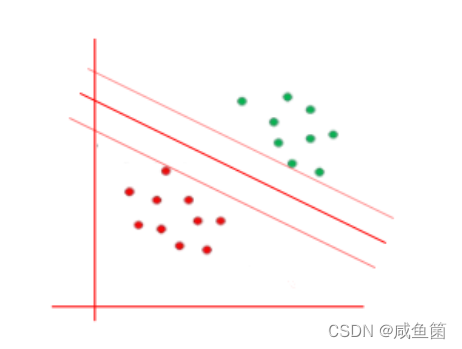
間隔最大化
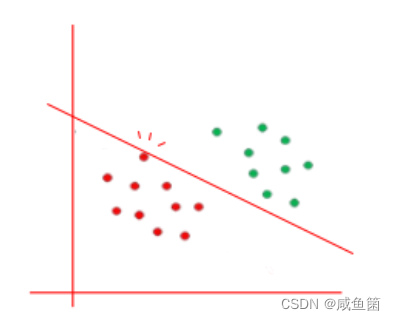
在BP演算法中,稍微調整,改變神經網路的狀態,在正確識別出學習資料的那一刻,學習隨之終止,因此,有時候會出現集合體的邊緣觸碰到線的情況,
面對上述情況,使用支持向量機就可以找出兩組資料之間距離最大的地方(最大間隔)并在其中間劃線,
最紅的線與2組資料距離最大,被稱做合適的線,這樣可以根據學習資料得出的識別線,判斷哪些是未學習的資料,這就是泛化能力
深度學習(Deep Learning)
深度學習是無監督學習的一種, 深度學習的概念源于人工神經網路的研究,含多隱層的多層感知器就是一種深度學習結構,深度學習通過組合低層特征形成更加抽象的高層表示屬性類別或特征,以發現資料的分布式特征表示,
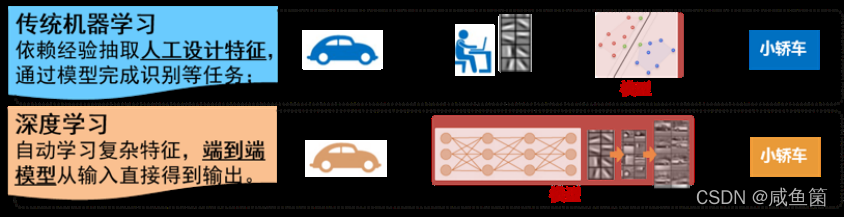
機器學習需要人工提取,深度學習可以讓計算機自己提取特征,并以此為基礎對影像進行分類,
深度學習的方法
深度學習是多層(4層以上)神經網路的總稱,其中包含很多具體的方法,
不細說了,簡單了解一下就行,
卷積神經網路(CNN)
卷積神經網路(Convolutional Neural Networks, CNN)是一類包含卷積計算且具有深度結構的前饋神經網路(Feedforward Neural Networks),是深度學習(deep learning)的代表演算法之一 ,卷積神經網路具有表征學習(representation learning)能力,能夠按其階層結構對輸入資訊進行平移不變分類(shift-invariant classification),因此也被稱為“平移不變人工神經網路(Shift-Invariant Artificial Neural Networks, SIANN)” ,
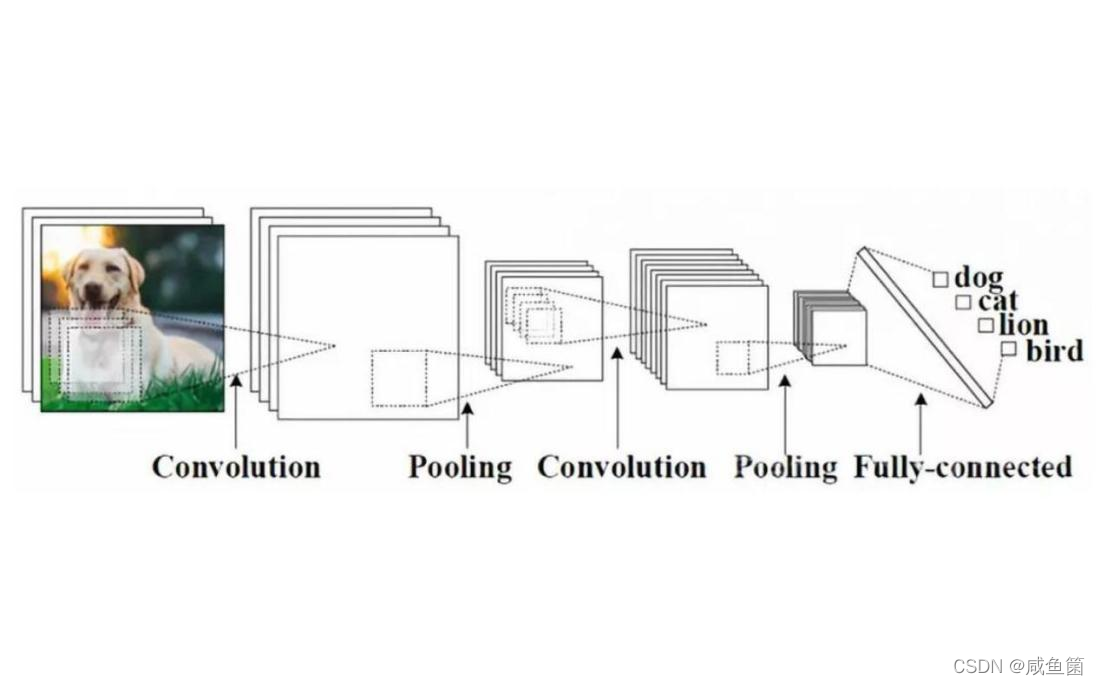
卷積神經網路已成為當前語音分析和影像識別領域的研究熱點,并且是深度學習模型中最成功的模型,
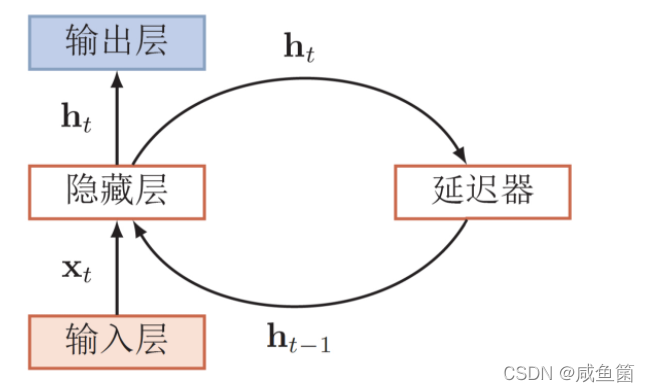
回圈神經網路(RNN)
回圈神經網路(Recurrent Neural Network,
RNN)是一類以序列(sequence)資料為輸入,在序列的演進方向進行遞回(recursion)且所有節點(回圈單元)按鏈式連接的遞回神經網路(recursive
neural network) ,
玻爾茲曼機(BM)
玻爾茲曼機是一種隨機神經網路,一般用來當做資料生成模型
參考資料
- 《漫畫人工智能》
- 《神經網路與深度學習應用實戰》
- 百度百科
- 360百科
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/437976.html
標籤:AI
上一篇:YOLOv4網路結構詳解