建立模型,確認關節
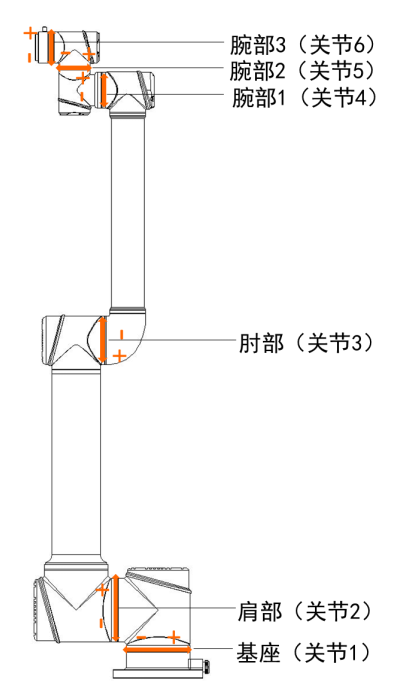
六自由度的機械臂應該有六處可旋轉的關節,這就意味著在系結約束的時候需要提供六個自由度,需要找出這六個關節,典型六自由度關節如圖示,
添加關節約束
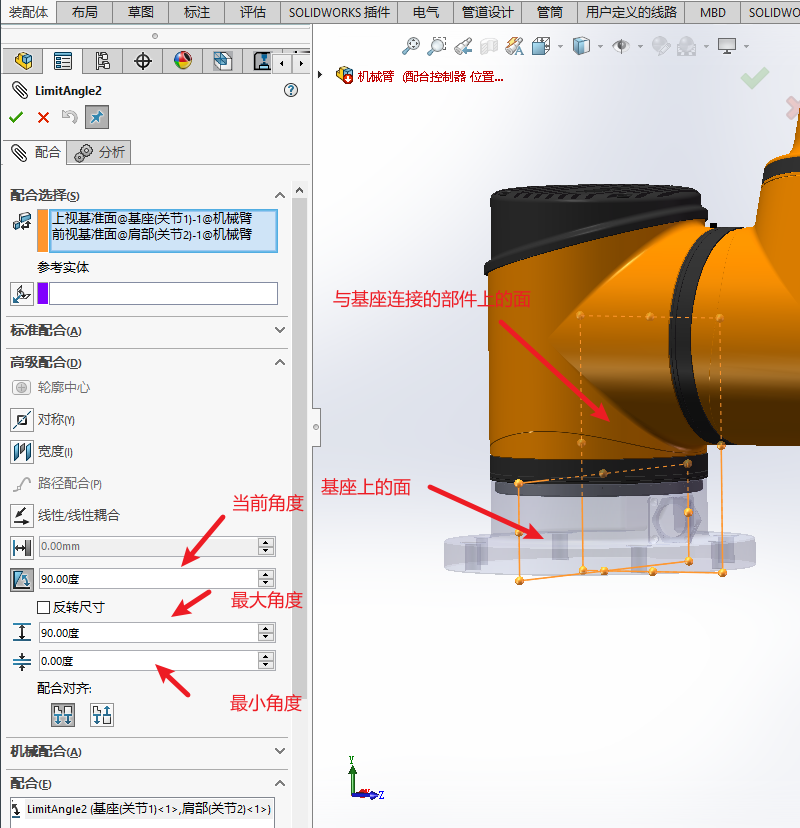
需要添加的是6個角度限制約束,建議為面與面之間的轉角限制,以基座為例,找到兩個可以描述轉動關系的面:
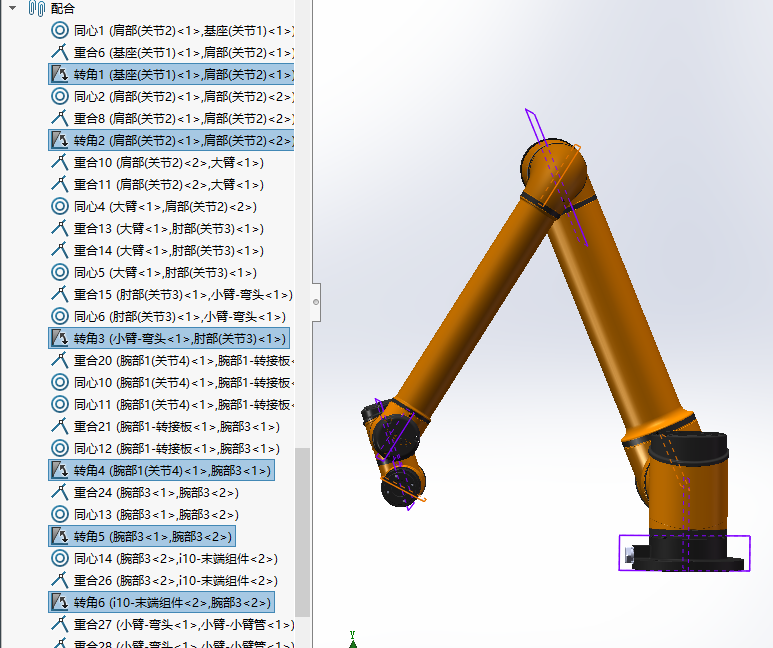
這里展示一下我建好的6個轉角約束
此時已經可以自由拖動機械臂了:
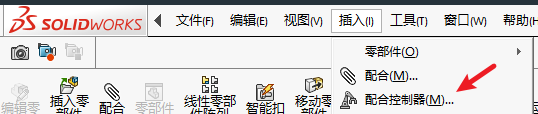
我希望能夠統一管理這六個約束,于是添加配合控制器,位置在插入->配合控制器:
使用配合控制器收集配合,然后添加幾個期望的位置點
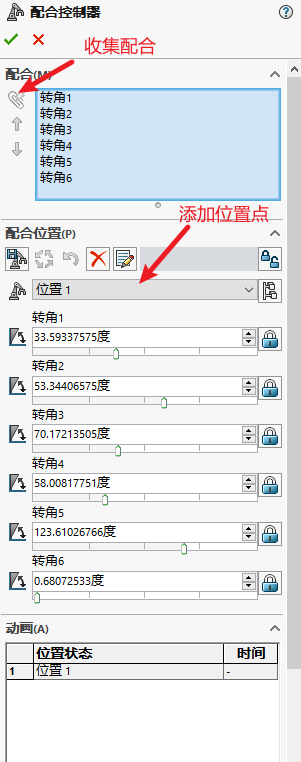
添加位置點
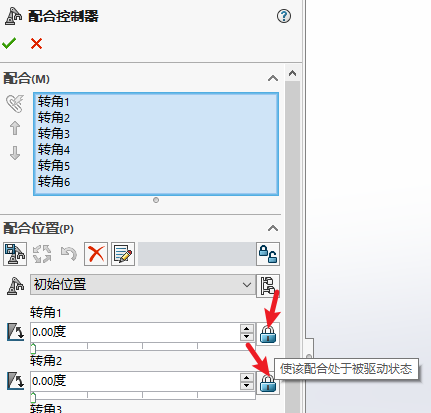
①手動拖動:點擊配合控制器中的運動鎖定,使配合處于被驅動狀態后,即可手動拖動位置
②直接改變角度:拖動轉角即可
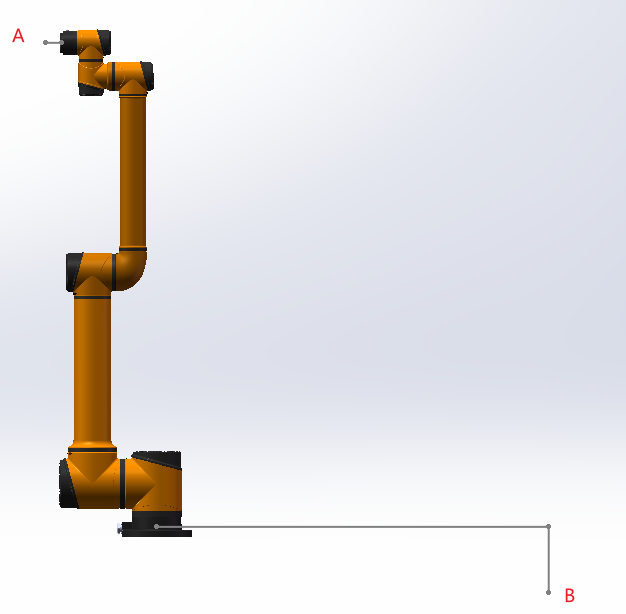
③使末端抵達某特定位置點
這需要使用到配合,例如需要圖中A點抵達B點,首先在配合控制器中,讓所有配合處于被驅動狀態
建立配合,勾選只用于定位
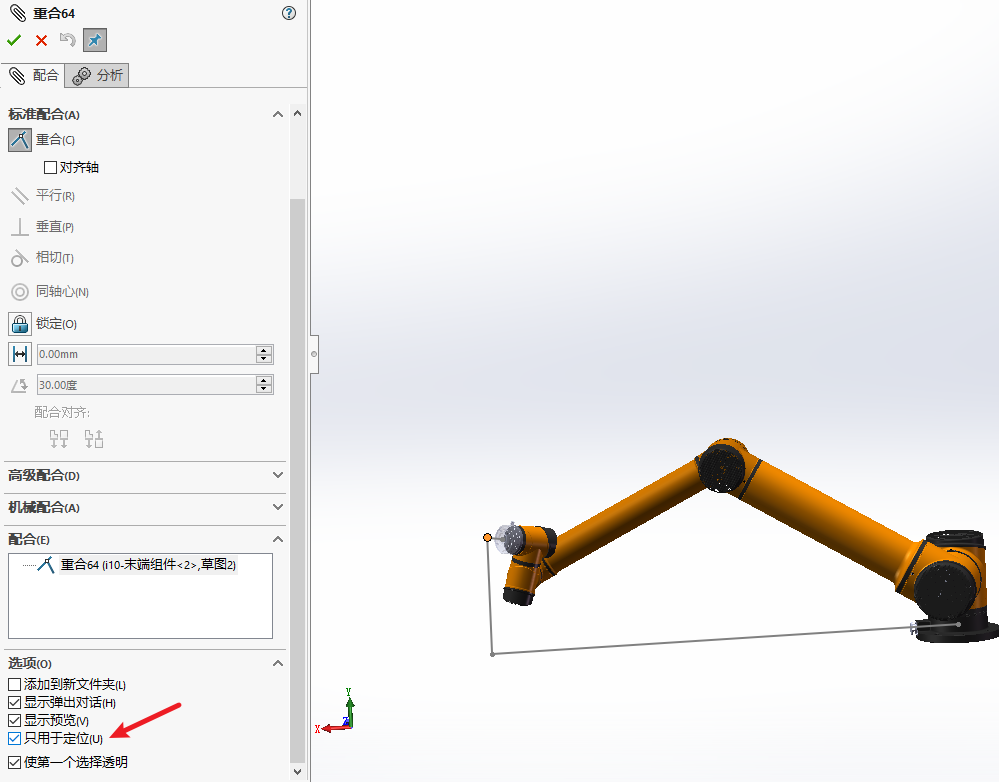
然后在配合控制器內添加目前的位置即可
在配合控制器最下方點擊計算影片按鈕(帶個小齒輪),可以看到目前的影片
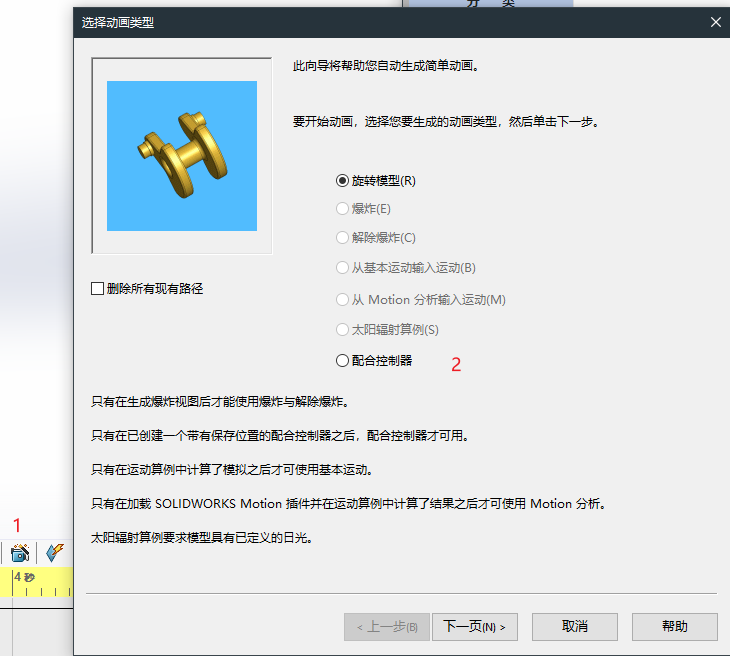
生成影片
點擊影片向導,選擇配合控制器,即可生成影片
一個簡單的機械臂影片就完成啦
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/465999.html
標籤:其他
上一篇:上班摸魚與網路安全