Deep ANC:主動噪聲控制的深度學習方法
原論文地址:Deep ANC: A deep learning approach to active noise control
引文:[1] Hao Z A , Dlwa B . Deep ANC: A deep learning approach to active noise control[J]. Neural Networks, 2021, 141:1-10.
摘要
傳統的主動噪聲控制(ANC)方法是以最小均方演算法為基礎的自適應信號處理,主要用于線性系統,但是在存在非線性失真的情況下表現不佳,在本文中,我們將 ANC 表述為一個監督學習問題,并提出了一種稱為深度 ANC 的深度學習方法來解決非線性 ANC 問題,主要思想是利用深度學習對不同噪聲和環境對應的最優控制引數進行編碼,訓練卷積遞回神經網路(CRN) ,從參考信號中估計出抵消信號的實、虛譜圖 ,以便相應的反噪聲可以消除或衰減 ANC 系統中的初級噪聲,通過采用大規模多條件訓練,實作對各種噪聲的良好泛化能力和魯棒性,無論參考信號是噪聲還是含噪聲的語音,都可以訓練深度 ANC 方法來實作主動噪聲抵消,此外,還引入了延遲補償策略來解決 ANC 系統的潛在延時問題,實驗結果表明,深度 ANC 對寬帶降噪是有效的,并且可以很好地推廣到未經訓練的噪聲,此外,所提出的方法可以在一定的安靜區域內實作 ANC,并且對參考信號的變化具有魯棒性,
關鍵詞:主動噪聲控制,深度學習,深 ANC,揚聲器非線性,安靜區域
1 . 引言
主動噪聲控制是一種基于聲信號疊加原理的噪聲消除方法,即兩個疊加的波形信號在振幅相同但相位相反時相互抵消,ANC 系統的目標是生成與主要噪聲具有相同幅度和相反相位的抵消噪聲來消除主要噪聲( Goodwin, Silva, & Quevedo, 2010 ), ANC不同于被動的噪聲控制,例如使用耳塞等吸聲屏障,在信號增強中通過處理含噪語音等含噪信號去除噪聲( Wang & Chen, 2018),從根本上說,ANC 需要提前預測空間中給定點的噪聲信號的幅度和相位,雖然信號幅度可能會隨著時間的推移保持穩定,但由于聲波的性質,信號相位在任何空間位置都會一直變化( Hartmann, 2004),因此 ANC 是一個非常具有挑戰性的問題,在實踐中它只能衰減低頻固定噪聲,
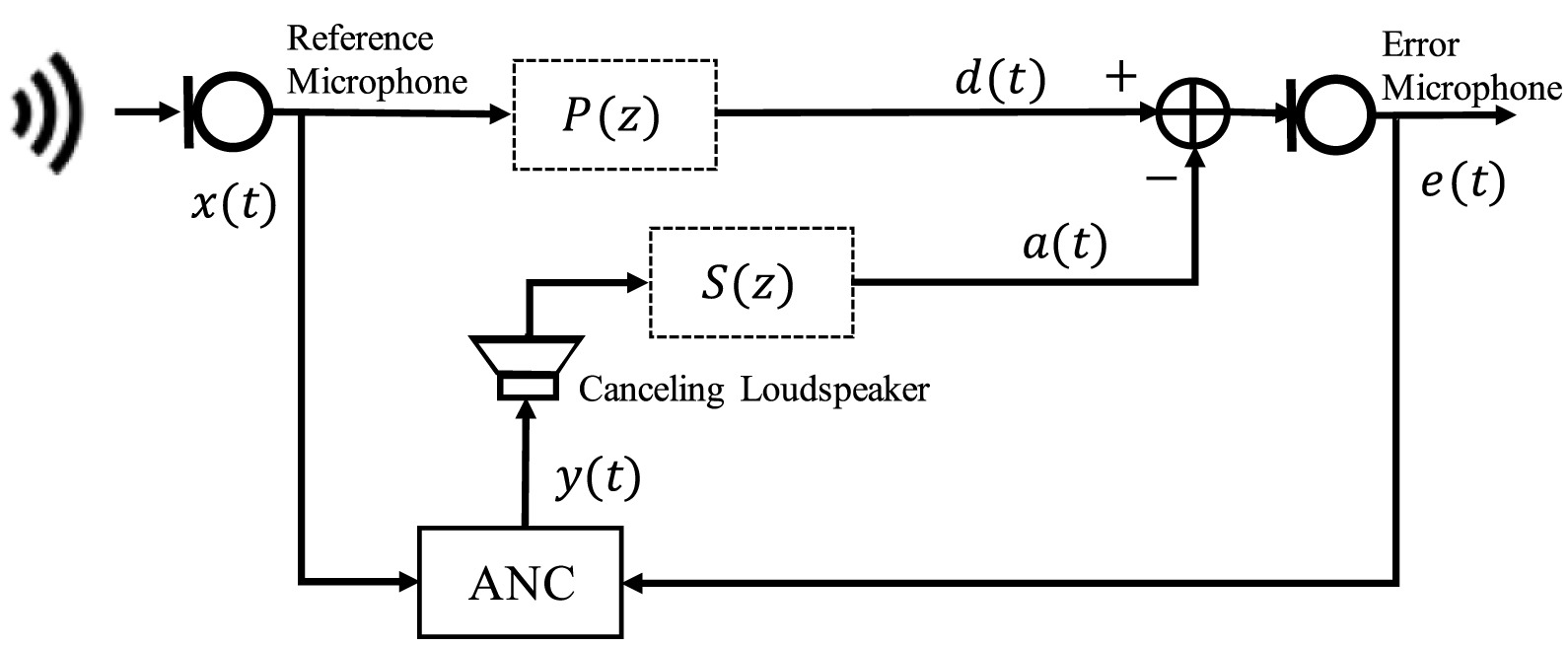
在過去的幾十年中,ANC 在研究和工業應用中引起了越來越多的關注,有兩種 ANC 系統:前饋和反饋 ( Hartmann, 2004 ),一個典型的前饋 ANC 系統如圖1所示,它由一個參考麥克風、一個消音揚聲器和一個誤差麥克風組成,有源噪聲控制器將參考麥克風和誤差麥克風分別感測到的參考信號和誤差信號作為輸入,以自適應控制器,使產生的抵消信號可以與要消音的位置的初級噪聲疊加,反饋 ANC 僅使用誤差傳感器來自適應控制器,并且更易于實施,但是,在處理寬帶噪聲時,它不如前饋 ANC 有效,因為反饋 ANC 不使用來自參考信號的資訊,
傳統上,有源噪聲控制器是使用自適應濾波器實作的,該濾波器通過最小化誤差信號來優化濾波器特性 (Manolakis, Ingle, Kogon, et al., 2000),Filtered-x最小均方(FxLMS) 及其擴展是最廣泛使用的有源噪聲控制器,因為它們具有簡單性、魯棒性和相對較低的計算負載,如圖1所示,FxLMS 演算法在次級路徑反饋到控制器之前對其進行估計,提前過濾參考信號x(t)來減輕次路徑的影響, (Elliott, Stothers, & Nelson, 1987) ,次路徑通常作為有限脈沖回應濾波器(FIR) 預先單獨估計,然而, 由于放大器和揚聲器等電子設備的性能有限,非線性失真不可避免地被引入到 ANC 應用中的抵消噪聲中,在存在非線性的情況下,線性自適應演算法無法準確識別次要路徑,因此,不準確估計的次要路徑會降低整體噪聲消除性能, Costa, Bermudez, and Bershad (2002) 對次級路徑包含非線性元件時的 FxLMS 行為進行統計分析,并得出即使小的非線性會對自適應濾波器的行為產生重大影響,
文獻中已經提出了許多自適應非線性 ANC 演算法來解決非線性失真 (Das and Panda, 2004, Ghasemi et al., 2016, Kuo and Wu, 2005, Lashkari, 2006, Napoli and Piroddi, 2009, Tan and Jiang, 2001, Tobias and Seara, 2005) ,Volterra 展開式已被證明對較弱的非線性建模是有效的 (Lashkari, 2006) ,并且已經提出了基于截斷二階 Volterra 濾波器的 FxLMS 演算法用于在存在非線性失真的情況下的前饋主動噪聲控制 (Guo et al., 2018, Tan and Jiang, 2001), Napoli and Piroddi (2009) 利用具有外生變數(NARX)的多項式非線性自回歸模型來識別控制器結構,以實作更高效和可靠的非線性 ANC,非線性 FxLMS 和基于切向雙曲函式的 FxLMS (THF-FxLMS)演算法,通過將次級路徑建模為飽和型非線性來處理 ANC 系統的非線性 (Ghasemi et al., 2016) ,其他演算法如雙線性 FxLMS (Kuo & Wu, 2005)、filtered-s LMS (Das & Panda, 2004)、leaky FxLMS (Tobias & Seara, 2005) 也已被研究以解決非線性問題,然而,在存在強非線性的情況下,它們的性能受到限制,
考慮到神經網路處理非線性關系的能力,神經網路已經被引入來解決非線性 ANC (George & Panda, 2013) , Snyder and Tanaka (1995) 引入了多層感知器 (MLP) 網路, 用于主動控制振動,其中神經網路的權重通過使用自適應濾波- x反向傳播進行更新,在 Snyder and Tanaka (1995), 給出的非線性主動控制結構的基礎上, 又開發了改進的訓練演算法以提高收斂速度并減少訓練的計算量 (Bouchard et al., 1999, Chang and Luoh, 2007). Krukowicz (2010) , Krukowicz (2010) 和 Panda and Das (2003) 使用基于功能鏈接神經網路的高效 ANC 結構來解決 ANC 中的非線性效應,其他的非線性自適應模型,例如徑向基函式網路 (Tokhi & Wood, 1997) 、模糊神經網路 (Zhang, Gan, & Zhou, 2006) 和回圈神經網路 (Bambang, 2008) ,進一步提高了 ANC 性能,這些用于非線性 ANC 的神經網路架構利用在線自適應或訓練來獲得最佳控制器引數,因此應被視為自適應演算法>,
深度學習能夠對復雜的非線性關系進行建模,并可能在解決非線性 ANC 問題中發揮重要作用,為了適用于實際應用,ANC 系統必須能夠衰減各種噪聲并應對聲學環境的變化,傳統的 ANC 系統是自適應的,通過適當調整的引數來處理這些變化,對于基于深度學習的監督式 ANC,需要進行大規模的多條件訓練,以便在訓練期間將 ANC 暴露在各種噪聲和變化中,以這種方式訓練的深度學習模型可能會推廣到未經訓練的噪聲和環境,
在本文中,我們提出了一種新的方法來解決 ANC,特別是非線性 ANC 問題,我們的方法稱為深度 ANC,采用經過訓練的深度學習模型來編碼對應于不同噪聲源的最佳控制引數,考慮到 ANC 本質上對抵消噪聲的幅度和相位都很敏感,我們使用復雜的頻譜映射來同時估計 ANC 輸出的幅度和相位回應 (Fu et al., 2017, Tan and Wang, 2019b, Williamson et al., 2016) ,在訓練期間,訓練一個CRN 網路 (Tan & Wang, 2019a) 通過參考信號來估計真實和假想的抵消信號的頻譜圖,隨后的抵消噪聲是通過將抵消信號通過揚聲器和輔助路徑來獲得的(參見圖 1),最后,誤差信號用于計算訓練CRN網路模型的損失函式,據我們所知,這項研究是首次嘗試將 ANC 表述為監督學習問題并使用深度學習來解決它,
從方法論的角度來看,深度 ANC 可能比傳統的 ANC 演算法更有優勢,除了衰減噪聲信號外,還可以訓練深度 ANC 來衰減嘈雜語音信號的噪聲分量,并讓底層語音信號通過,也就是說, 深ANC原則上可以通過選擇性地抑制噪聲信號中的噪聲成分來保持嵌入在噪聲中的目標信號 ;目標信號不一定是語音,也可以是其他種類的,比如音樂,這一優勢可以極大地擴大 ANC 的適用范圍,此外,我們引入了延遲補償訓練策略來解決頻域 ANC 演算法的缺點:處理延遲,
除了在給定位置點的 ANC,更有用但更具挑戰性的任務是在一個小的空間區域內執行 ANC,即生成一個安靜區域, 深度ANC方法可以用RIR (房間脈沖回應)獨立的方式進行訓練,生成這樣的安靜區,,
該研究的初步版本最近發表 (Zhang & Wang, 2020) ,與會議版本相比,本文提供了更廣泛的評估范圍,具有更多的噪聲、信噪比 (SNR) 和未經訓練的語音, 此外,本文還研究了深度ANC在參考信號變化時的魯棒性,并與其他非線性ANC方法進行了比較 ,
本文的其余部分安排如下,第 2節介紹了有源噪聲控制的信號模型,第 3節介紹了深度 ANC 方法,評估指標和實驗設定在第 4節,第 5節顯示了評估結果和比較,第 6節總結了本文,
2 . 主動噪聲控制
2.1 . 信號模型
如圖1所示,主路徑和次路徑分別對應于從參考麥克風或抵消揚聲器分別到誤差麥克風的聲學回應,它們的頻率回應表示為P(z)和S(z),參考信號X(t)由參考麥克風拾取并通過有源噪聲控制器以獲得抵消信號y(t),抵消信號通過抵消揚聲器和輔助路徑產生抵消噪聲a(t), 誤差麥克風感應到的相應誤差信號定義為
\[\begin{aligned} e(t) &=d(t)-a(t) \\ &=p(t) * x(t)-s(t) * f_{\mathrm{LS}}\left\{w^{T}(t) x(t)\right\} \end{aligned}\tag{1} \]其中t是時間指數,d(t)是誤差麥克風接收到的主路徑信號,w(t)表示有源噪聲控制器,fLS{?}表示揚聲器的作用,?表示線性卷積,上標T表示轉置,此外,p(t)和s(t)分別表示主要和次要路徑的脈沖回應,
主動噪聲控制旨在產生抵消噪聲以消除初級噪聲,傳統上, 這是通過使用自適應演算法對數字濾波器W(z)進行估計,使均方誤差最小來完成的,FxLMS演算法及其變體通過首先估計次級路徑,然后放置估計的\(\widehat{S} (z)\)濾波器來補償次級路徑的影響,輔助路徑通常在 ANC 應用的初始階段使用離線估計,傳統ANC 方法的性能很大程度上取決于\(\widehat{S} (z)\)的估計精度,
2.2 . 用于主動噪聲控制的深度學習
忽略揚聲器的作用,公式(1)的z變換可以寫成
\[E(z)=[P(z)-S(z)W(z)]X(z)\tag{2} \]假設在自適應濾波器收斂后殘差完全衰減,則自適應濾波器的最優解可以表示為如下傳遞函式
\[W^0(z)=\frac{P(z)}{S(z)} \tag{3} \]這意味著 ANC 系統必須建模P(z)和S(z)的逆才能達到最佳降噪性能 (Kuo & Morgan, 1999) ,然而,S(z)的逆不一定存在,對于傳統的自適應演算法來說直接估計濾波器W(z)可能很復雜,更不用說揚聲器引入的非線性失真了,
與需要單獨估計次級路徑和自適應濾波器的傳統 ANC 方法不同,深度 ANC 使用監督學習并訓練深度神經網路來直接逼近最優控制器\(W^0(z)\)以盡量減少不同情況下的誤差信號,深度 ANC 的示意圖如圖 2 所示,總體目標是從參考信號中估計一個抵消信號,以便產生相應的抵消噪聲消除主噪聲,在所提出的方法中,我們使用參考信號作為輸入,并將理想的抵消噪聲設定為訓練目標,為了實作完全的噪聲消除,理想的抵消噪聲應該與初級噪聲相同,在訓練程序中,深度 ANC 的輸出被視為“中間產品”,通過揚聲器和輔助路徑傳遞深度 ANC 輸出來生成抵消噪聲估計,損失函式是根據誤差信號計算的,
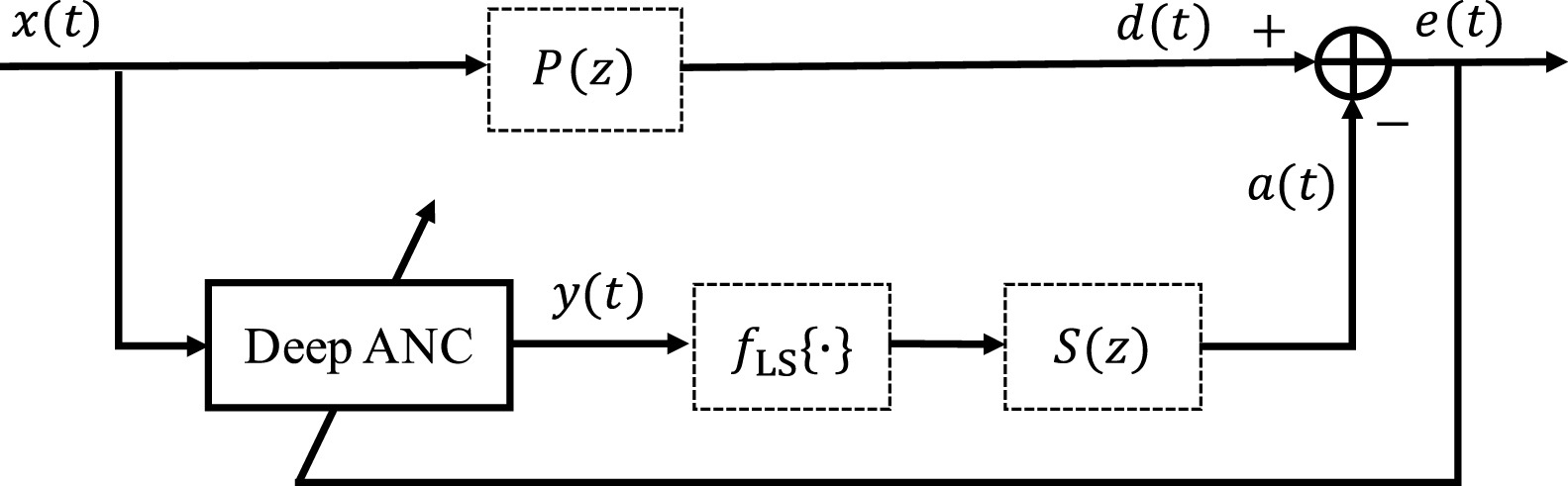
將 ANC 表述為監督學習問題并非易事,這種表述存在兩個概念障礙,首先,定義深度神經網路 (DNN) 的訓練目標并不簡單,盡管用于衰減初級噪聲的理想消除信號是已知的,但由于揚聲器和次級路徑的存在,它不能直接用作 DNN 的所需輸出(見圖2),其次,主要路徑和次要路徑可能隨時間變化,并且 DNN 需要近似的傳遞函式對于不同的聲學條件可能不同,這似乎意味著監督學習模型需要預測一對多映射,這是一項不可能完成的作業,?這些障礙可以解釋為什么沒有從深度學習的角度來處理 ANC,然而,正如下一節中所詳述的,我們可以使用理想的抵消噪聲來監督 DNN 訓練,并且可以訓練 DNN 來估計給定輸入的不同場景下不同輸出的一些平均值,通過這些觀察,ANC 可以被表述為一項深度學習任務,
3 . 深度 ANC 方法
3.1 . 特征提取和訓練目標
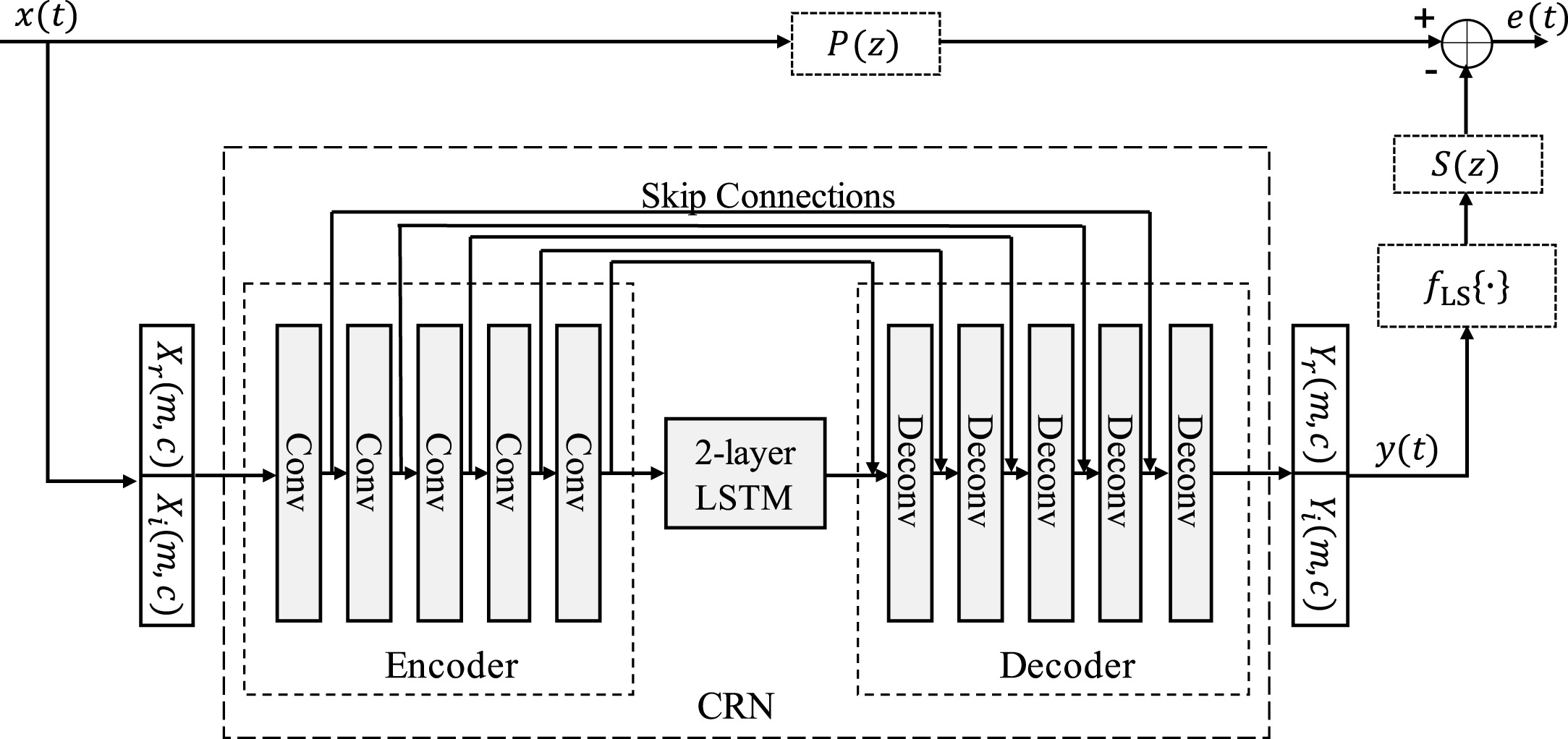
參考信號x(t)以16 kHz 的頻率進行采樣,并分為 20 毫秒的幀,相鄰連續幀之間有 10 毫秒的重疊, 然后對每一個時間幀進行320點短時傅里葉變換( STFT ),產生x (t)的實、虛譜圖,在時間m和頻率c的一個T-F單元內分別記為Xr ( m , c )和Xi ( m , c ),為深度 ANC提出的CRN神經網路如圖 3所示,它需要Xr ( m , c )和Xi ( m , c )作為復雜頻譜映射的輸入特征,
為了衰減誤差麥克風位置的主要噪聲,深度 ANC 使用理想的抵消噪聲(主要噪聲)作為訓練目標,CRN 網路被訓練為從參考信號的實部和虛部頻譜圖映射到抵消信號的頻譜圖Yr(m, c)和Yi (m, c). 這與僅估計幅度譜圖和使用輸入信號的相位譜圖生成估計波形輸出的方法不同,我們選擇復雜的頻譜映射是因為相位在有源噪聲控制中的重要性,抵消信號的復頻譜圖經過傅里葉逆變換得到波形信號 y(t). 然后通過將消除信號通過揚聲器和輔助路徑來生成可以被視為訓練目標的估計的抵消噪聲,
3.2 . 兩種訓練策略和損失函式
在實際應用中,ANC 應用可能需要處理參考信號是嘈雜語音的情況,以降噪耳機為例,當有人在用戶附近說話時,耳機上的參考麥克風可能會拾取語音,在這種情況下,參考信號是語音和初級噪聲的混合,在這種情況下,ANC 應該理想地允許語音信號通過,同時抑制主要噪聲,
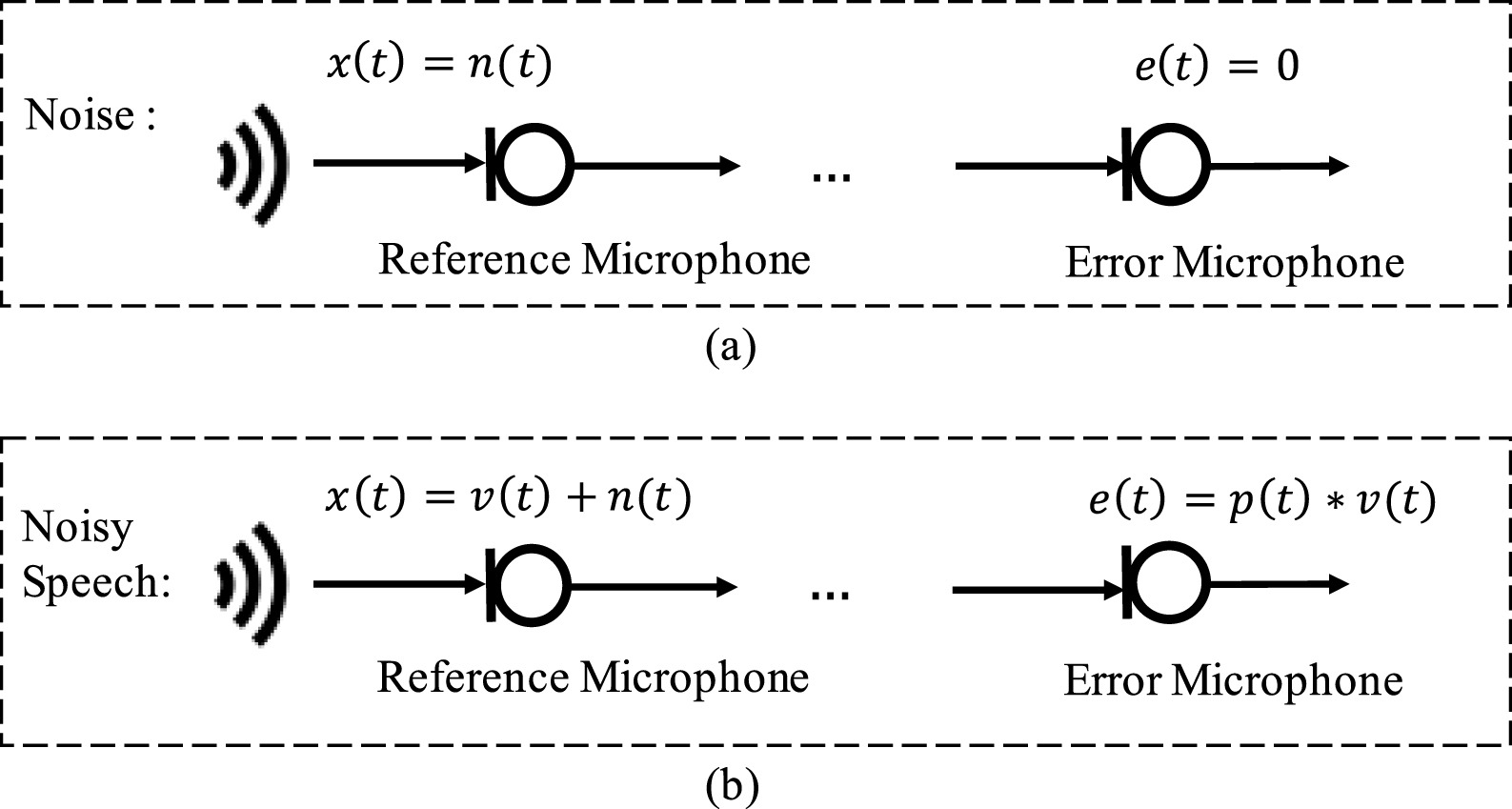
通過使用適當的訓練資料和損失函式,無論參考信號是噪聲還是嘈雜的語音,都可以訓練深度 ANC 以實作噪聲消除,圖 4顯示了深度ANC 方法的兩種訓練策略:
-
使用噪音訓練ANC:訓練這種模型是為了抵消參考麥克風接收到的噪音,為此,我們采用噪聲信號n(t)作為參考信號,訓練深度ANC以完全消除主噪聲,損失函式定義為:
\[L_n=\frac{\sum_{t=1}^{L}e^2(t)}{L}\tag{4} \] -
使用嘈雜語音訓練的深度 ANC :這時深度ANC模型在保留語音信號的同時,可以抵消周圍的噪聲,訓練該深度ANC系統的參考信號是噪聲n(t)和語音v(t)的混合信號,對應的主噪聲信號d(t)為
\[\begin{aligned} d(t) &=p(t) *[v(t)+n(t)] \\ &=p(t) * v(t)+p(t) * n(t) \end{aligned}\tag{5} \]
其中p(t) * n(t)和p(t) * v(t)分別是主噪聲信號的噪聲和語音成分,為了只衰減噪聲分量,讓語音通過,將訓練目標設定為噪聲分量p(t) * n(t),此時理想的誤差信號等價于p(t) * v(t),用于訓練這種深度ANC系統的損失函式定義為:
\[L_{n s}=\frac{\sum_{t=1}^{L}[e(t)-p(t) * v(t)]^{2}}{L}\tag{6} \]3.3 . 學習機
Deep ANC 使用 CRN 網路進行復雜的頻譜映射 (Tan & Wang, 2019a) ,除了先前的用于復雜的頻譜映射和強大的語音增強性能外,CRN 還表現出更高的引數效率并適用于實時處理,CRN 具有編碼器-解碼器結果,如圖3所示,其中編碼器和解碼器分別包括五個卷積層和五個反卷積層,它們之間是兩個具有組策略的回圈LSTM(長期短期記憶)層 (Gao et al., 2018) ,其中組數設定為2. 編碼器-解碼器結構以對稱方式設計,其中內核的數量在編碼器中逐漸增加,在解碼器中逐漸減少,為了聚合前后頻譜,在所有卷積層和反卷積層中沿頻率維度采用 步長為2,因此,特征映射的頻率維度在編碼器中逐層減半,在解碼器中逐層加倍,以確保輸出與輸入具有相同的形狀,在 CRN網路中使用跳躍連接,以便每個編碼器層的輸出連接到相應解碼器層的輸入,在 CRN 網路中,所有的卷積和反卷積是因果關系,因此系統不使用未來資訊,因此適合實時運行, Tan and Wang (2019a) 中提供了 CRN 結構的詳細描述,
我們在除輸出層外的所有卷積和反卷積層中使用指數線性單元 (ELUs) (Clevert, Unterthiner, & Hochreiter, 2015) ,其中線性激活用于頻譜圖估計,此外,我們在每次卷積或反卷積后和激活之前使用批處理歸一化 (Ioffe & Szegedy, 2015) ,該模型使用 AMSGrad 優化器 (Reddi, Kale, & Kumar, 2019) 進行訓練,學習率為 0.001,歷時 30 次,
3.4 . 延遲補償訓練
提出的方法使用實部和虛部頻譜圖作為輸入和輸出,因此可以將其視為頻域 ANC 演算法,然而,頻域 ANC 演算法產生的時間延遲等于 STFT 的幀長度( (Yang, Cao, Wu, Albu, & Yang, 2018) ,這種延遲可能違反 ANC 的因果約束關系,這被認為是頻域 ANC 演算法的一個缺點, 為了減少這種延遲,人們提出了許多方法,這些方法并不容易被完全消除 (Bendel et al., 2001, Kim et al., 1994, Kuo et al., 2008, Park et al., 2001, Rout et al., 2015) ,
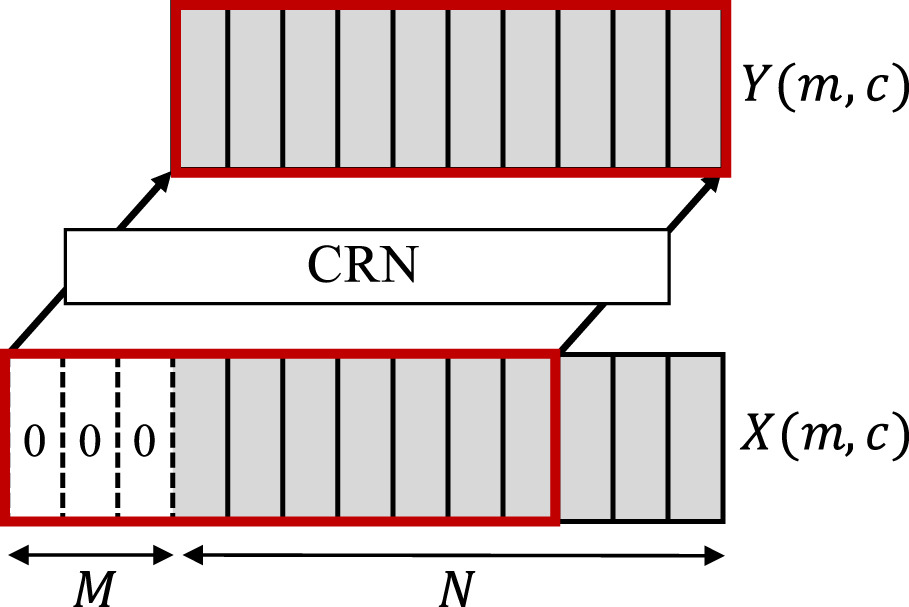
為了解決這個延遲問題,我們為深度 ANC 提出了一種延遲補償的訓練策略,主要思想是訓練模型提前幾幀預測抵消信號,該策略的示意圖如圖 5所示,其中N表示輸入信號中的總幀數,M表示預測幀的數量,具體來說,輸入信號在開始時首先通過填充M幀為0進行擴展,然后利用擴展輸入的前N幀作為新的輸入信號對模型進行訓練,新的輸入是M幀的零點和原輸入的前N-M幀的集合,而目標信號保持不變,因此相當于利用輸入信號提前預測目標的M幀,采用20 ms幀和10 ms幀移位,延時補償訓練節省10×M ms用于主動噪聲控制,因此,這種策略原則上可以解決頻域ANC系統的時延問題,
4 . 實驗裝置
4.1 . 性能指標
所提出方法的性能使用歸一化均方誤差(NMSE)、 可短時客觀可懂 (STOI) (Taal, Hendriks, Heusdens, & Jensen, 2011) 和語音質量感知評估(PESQ) (Rix, Beerends, Hollier, & Hekstra, 2001) 對所提出方法的性能進行了評估,
ANC 系統中誤差信號的功率通常用作噪聲衰減的質量度量 ,在本文中,我們使用以 dB 為單位的 NMSE 來衡量 ANC 系統的性能:
\[NMSE=10\log_{10}{\frac{{\textstyle\sum_{t=1}^{L}}e^2(t)}{\textstyle\sum_{t=1}^{L}d^2(t)}}\tag{7} \]其中L是信號的長度,NMSE 的值通常低于零,值越低表示噪聲衰減越好,
當參考信號是含噪語音時,STOI 和 PESQ 分別用于測量在誤差麥克風處接收到的去噪語音的可懂度和質量,它們是通過比較誤差信號和語音分量p(t)*v(t)得到的. STOI分數的范圍通常是從 0 到 1,PESQ 分數的范圍是從?0.5到 4.5,分數越高越好,
4.2 . 實驗設定
為了訓練一個與噪聲無關的模型,我們在訓練階段將 ANC 模型暴露在各種噪聲環境中 (Chen, Wang, Yoho, Wang, & Healy, 2016) 并使用 從音效庫 ( http://www.sound-ideas.com )得到的10 000 個非語音環境聲音(噪聲)創建訓練集,來自 NOISEX-92 (Varga & Steeneken, 1993) 的發動機噪聲、工廠噪聲、咿呀聲和語音型噪聲(表示為SSN)用于測驗,請注意,在訓練階段并不使用測驗噪聲,因此評估了所提出方法的泛化能力,
ANC 系統的物理結構通常被建模為矩形封閉空間 (Kestell, 2000, Tarabini and Roure, 2008),許多研究表明 ANC 系統在封閉房間內消除噪音方面的有效性 (Cheer, 2012, Samarasinghe et al., 2016, Sommerfeldt et al., 1995) ,在這項研究中,我們模擬了一個大小為 3 m×4m×2m(寬度×長度×高度) 的矩形封閉空間,并利用影像法 (Allen & Berkley, 1979) 為ANC 系統生成房間的主要和次要路徑脈沖回應,采用一個典型的場景,參考麥克風位于 (1.5, 1, 1) m 處,抵消揚聲器位于 (1.5, 2.5, 1) m 處,誤差麥克風位于 (1.5, 3, 1) m 處,主路徑噪聲源遠離墻壁以便于拾取噪聲 (Allen & Berkley, 1979) ,訓練時,使用五種不同的混響時間(T60s):0.15 s、0.175 s、0.2 s、0.225 s和0.25 s用于生成RIR,RIR的長度均設定為512, 每個T60時間生成兩個RIR ,一個用于主路徑,另一個用于輔助路徑,對于測驗,我們使用混響時間為 0.2 s 的 RIR 作為默認測驗 RIR,并且使用未經訓練的 T60 生成的 RIR 用于測驗深度 ANC 的泛化能力,
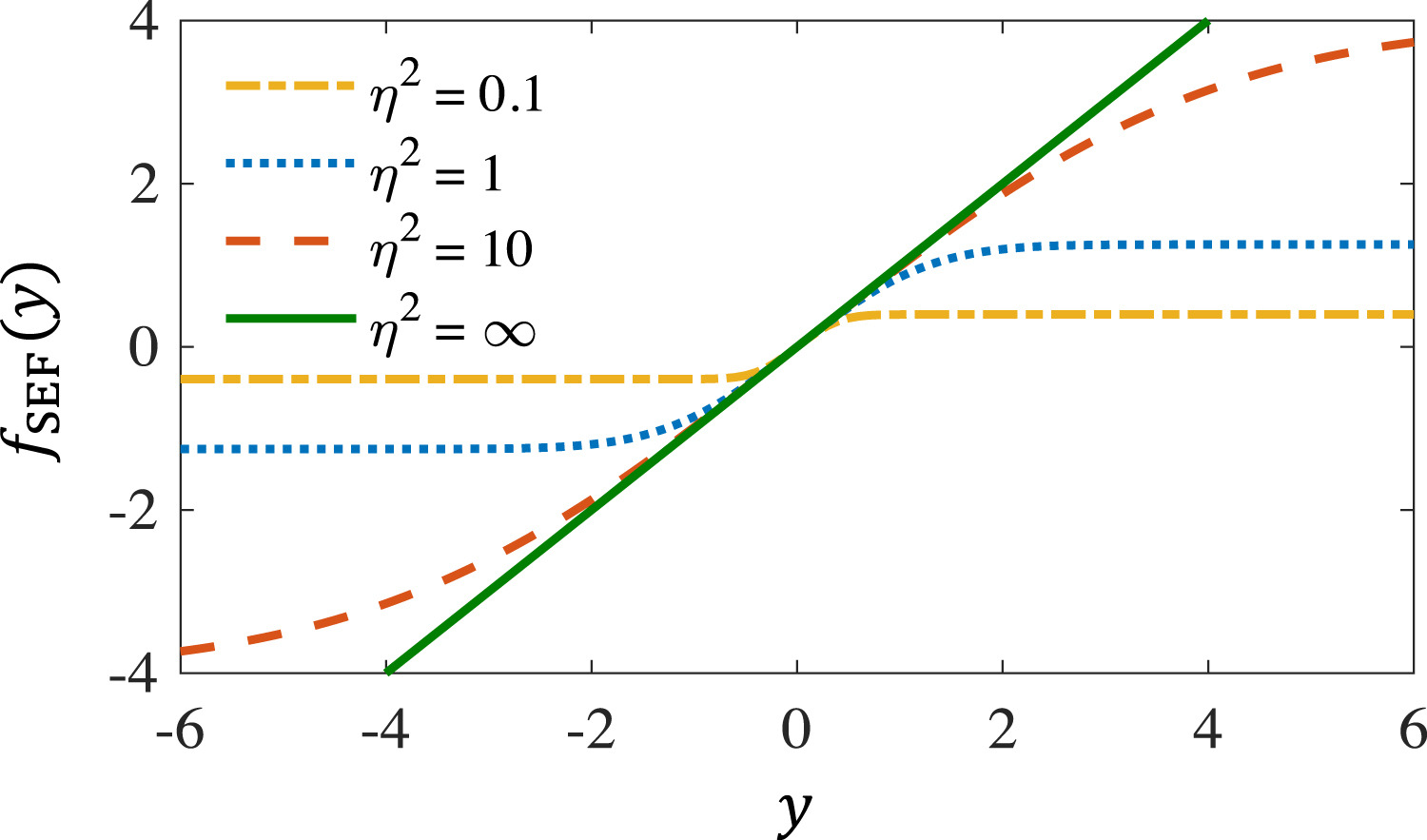
揚聲器產生的飽和效應是 ANC 系統中最重要的非線性來源 (Costa et al., 2002, Ghasemi et al., 2016) ,在揚聲器飽和度的 ANC 研究中 (Agerkvist, 2007, Bershad, 1990, Klippel, 2006, Tobias and Seara, 2006),這種非線性通常由尺度誤差函式 (SEF) 來表示 (Tobias & Seara, 2006) :
\[f_{SEF}=\int_{0}^{y}e^{-\frac{z^2}{2\eta}}dz\tag{8} \]其中y揚聲器的輸入(見圖1),\(\eta^2\)表示非線性的強度,它模擬常見的飽和非線性型別,例如受揚聲器尺寸限制的聲級飽和度, SEF隨著\(\eta^2\)趨于無窮大而變成線性,隨著\(\eta^2\)趨于零而變成硬限制器,為了考察所提方法對非線性失真的魯棒性,在訓練階段采用4個揚聲器函式:\(\eta^2\) = 0.1 (嚴重非線性),\(\eta^2\) = 1 (中度非線性),\(\eta^2\) = 10 (輕微非線性),\(\eta^2\) =\(\infty\)(線性),圖6繪出了\(\eta^2\)值的SEF,為了測驗,我們同時使用訓練和未訓練的揚聲器功能,
訓練深度 ANC 以處理參考信號為噪聲或含噪語音的情況,為此,我們為每種情況生成 20 000 個訓練信號和 100 個測驗信號,每個噪聲信號都是通過從 10 000 個噪聲信號中隨機切割一個 6 秒的信號而創建的, 用于產生帶噪語音的語音信號是從TIMIT資料集 (Lamel, Kassel, & Seneff, 1989) 中隨機選取200個說話人( 100名男性發言者和 100名女性發言者 )得到 ,每個說話者在 TIMIT 語料庫中有 10 個話語,其中 7 個用于訓練,其余 3 個用于測驗,為了產生一個含噪語音信號,將一個隨機選擇的說話人的語音與從10 000個噪聲中截取的隨機噪聲以[ 5、10、15、20] dB隨機選擇信噪比進行混合,主信號d(t)是由參考信號與主路徑隨機選擇的RIR卷積生成的,抵消噪聲a(t)是通過隨機選擇的揚聲器函式和隨機選擇的二次路徑RIR依次傳遞相應的抵消信號y(t)產生的,在下面的實驗中,我們用CRN-n和CRN-ns分別表示用噪聲和含噪語音訓練的深度ANC模型,
4.3 . 比較方法
深度ANC 方法在線性和非線性情況下與FxLMS演算法和 THF-FxLMS演算法 進行了比較,FxLMS 的作業原理是根據 FIR 濾波器對次級路徑進行建模,并利用估計的模型來調整濾波器系數以適應 ANC 控制器,當輔助路徑是線性系統時,FxLMS 實作了良好的噪聲衰減,然而,當系統中存在非線性失真時,它無法準確識別次級路徑,次要路徑的非線性模型用于有源噪聲控制以解決非線性失真,THF-FxLMS 是最近提出的非線性 ANC 演算法 (Ghasemi et al., 2016) ,它引入了雙曲正切函式(THF) 對揚聲器的飽和效應進行建模,然后將估計的非線性程度應用到 ANC 控制器的設計中,如 Ghasemi et al. (2016) 所示,在非線性失真情況下,THF-FxLMS 在噪聲衰減方面優于 FxLMS 和二階 Volterra 演算法,
FxLMS 和 THF-FxLMS 都是自適應演算法,可用于消除不同型別的噪聲,然而,它們的性能對諸如步長和濾波器長度等控制引數很敏感,當暴露在不同的噪音和環境中時,需要適當的步長來實作良好的性能,我們實驗中的 FxLMS 和 THF-FxLMS 的步長是根據 Chen and Zhang (2011) 以及 Huang and Xu (2012) 給出的標準針對不同的噪聲進行啟發式選擇的,以確保穩定的更新和良好的噪聲衰減,比較方法的濾波器長度設定為512,等于主路徑和次路徑的長度,
此外,我們在第 5.5節中考慮了另一種非線性 ANC 設定,其中將深度 ANC 與基于 Volterra 濾波器的演算法和基于MLP的方法進行了比較,
5 . 評估結果和比較
5.1 . 用噪聲訓練的深度 ANC 的性能
我們首先對用噪聲訓練的深度ANC模型的性能進行評估,在一個線性系統( \(\eta^2=\infty\))和兩個非線性系統( $\eta^2 $= 0.5 , $\eta^2 $ = 0.1 )中分別用4種未訓練噪聲對本文方法和傳統ANC演算法進行了測驗, 表 1顯示了 100 個測驗信號的平均NMSE,其中 CRN-n(-1) 和 CRN-n(-2) 表示使用延遲補償策略訓練的模型去提前預測1或2幀,對于發動機噪聲、工廠噪聲、babble噪聲和SSN這四種噪聲,更新FxLMS的步長分別設定為0.05、0.4、0.3、0.4,更新THF-FxLMS的步長分別設定為0.05、0.4、0.3、0.4,從該表中可以明顯看出,FxLMS 能夠衰減不同的噪聲,但在涉及非線性 ANC 時其性能會下降,THF-FxLMS 將次級路徑建模為非線性系統,并且在不同的非線性情況下實作了良好的噪聲衰減,深度 ANC 模型在線性和非線性情況下都優于對比的演算法,并且可以很好地推廣到未經訓練的噪聲和未經訓練的非線性系統($\eta^2=0.$5),正如預期的那樣,CRN-n 在深度 ANC 模型中表現最好,使用延遲補償策略提前預測一幀到兩幀仍然可以獲得良好的噪聲衰減水平,高于 FxLMS 和 THF-FxLMS演算法,而整體性能隨著預測長度的增加會逐漸下降,
在圖7中繪制了NMSE和功率譜曲線,進行了進一步的比較,功率譜測量信號相對于頻率的功率,這里用來表示在不同頻率下實作的相對噪聲衰減,圖中的結果是在發動機噪聲和非線性\(\eta^2\) = 0.1的情況下得到的,可以看出,深度ANC方法始終優于比較方法, 由圖7 (b)可知,該方法實作了寬帶降噪,而對比方法僅對低頻段的噪聲衰減有效,眾所周知,傳統的ANC演算法由于收斂和延遲等因素的限制,僅在低頻效果明顯 (Kuo and Morgan, 1999, Samarasinghe et al., 2016) ,因此,通常只采用窄帶噪聲或低通濾波噪聲作為輸入,而深度ANC對低頻噪聲和高頻噪聲都是有效的,需要注意的是,本研究使用的測驗噪聲是寬帶的,這也是表1中對比方法的降噪量低于已有文獻結果的部分原因,
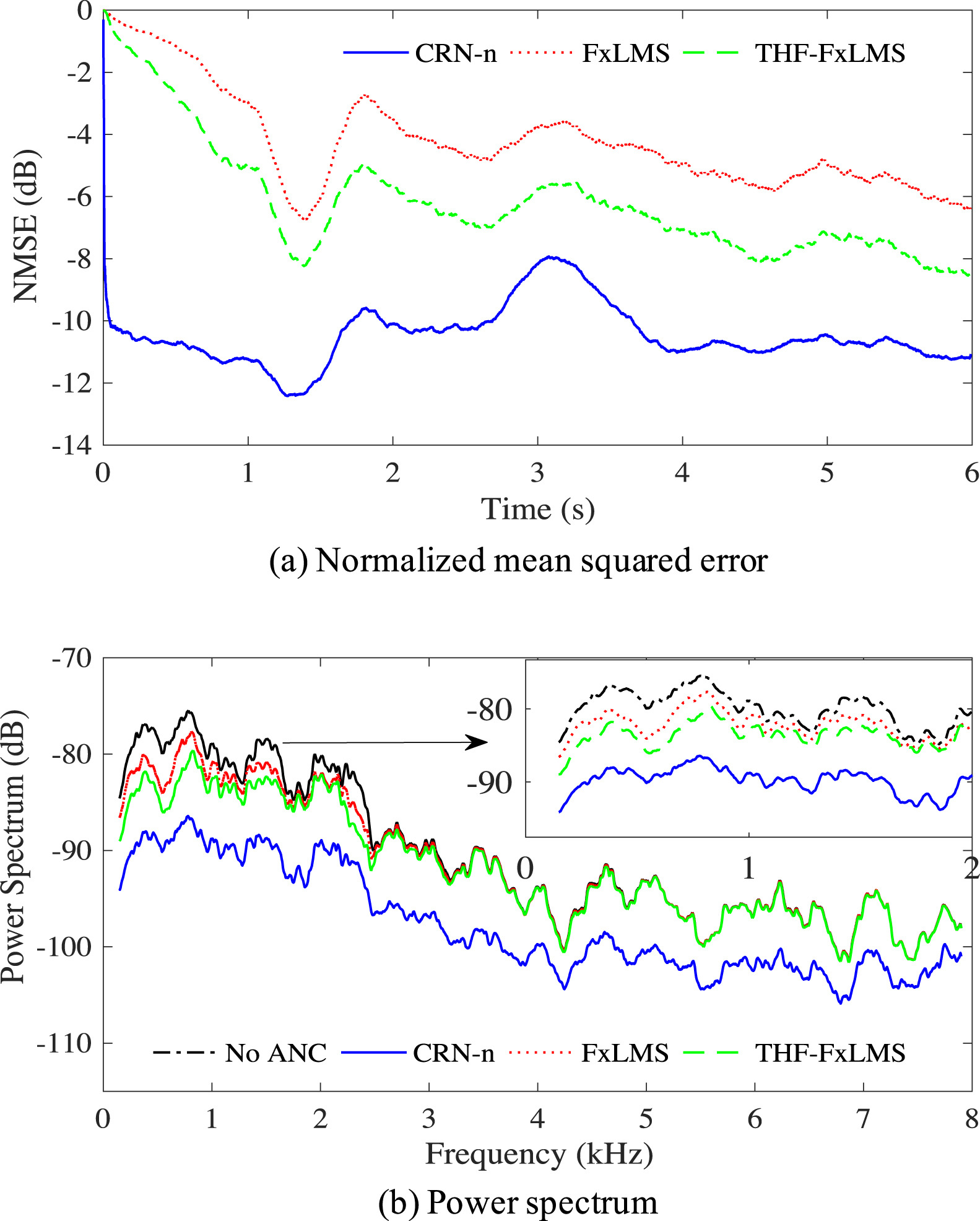
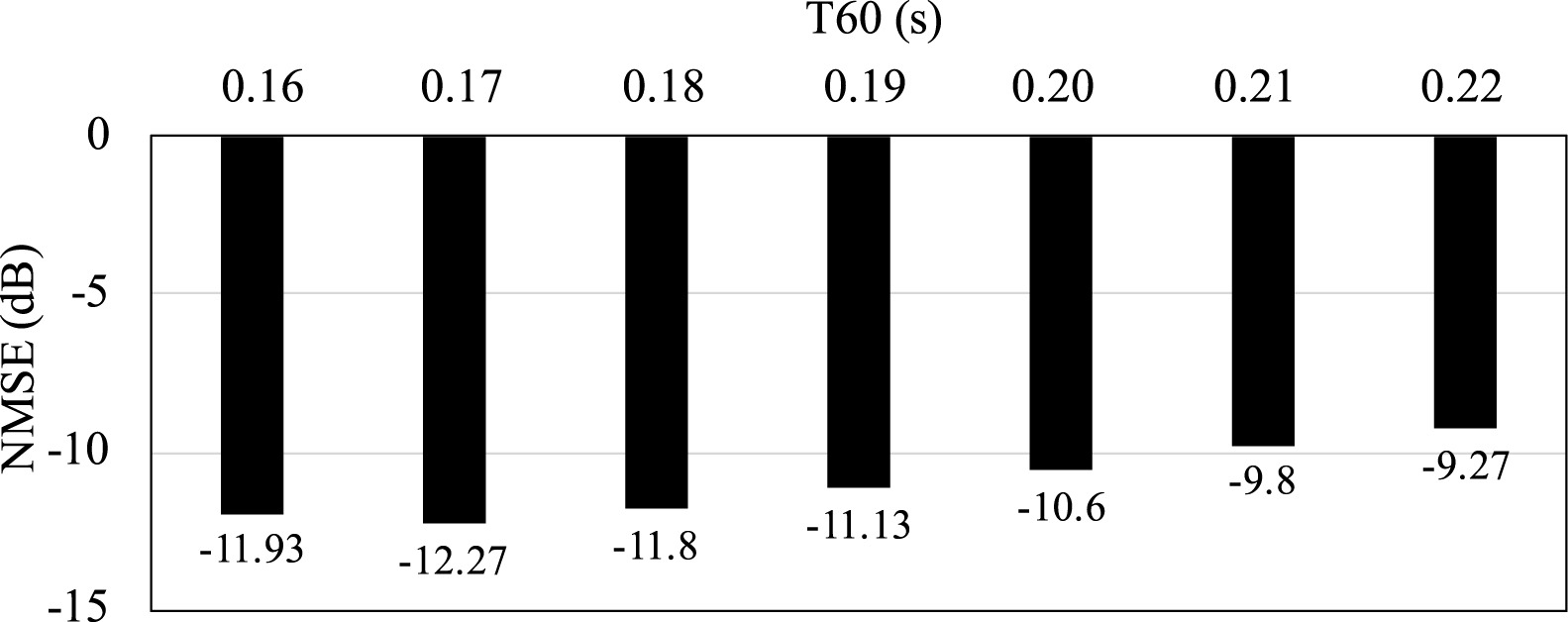
圖 8給出了使用不同 T60 值生成的 RIR 進行測驗時深度 ANC 的平均 NMSE,它表明深度 ANC 的降噪性能可以很好地推廣到未經訓練的 RIR,
5.2 . 用嘈雜語音訓練的深度 ANC 的性能
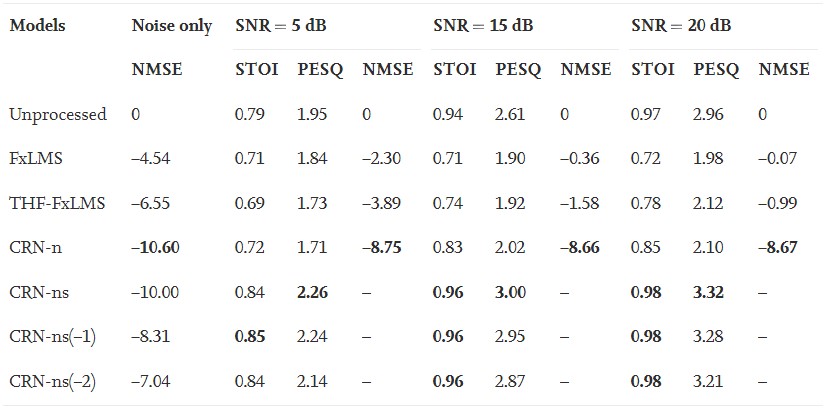
本小節評估參考信號為帶噪語音時深度 ANC 的性能,表 2給出了不同演算法在不同信噪比水平的噪聲和嘈雜語音情況下的比較結果,其中 CRN-ns(-1) 和 CRN-ns(-2) 表示使用延遲補償策略訓練的模型去提前預測1或2幀,在 SNR 為 5、15 和 20 dB三個級別的發動機噪聲下, FxLMS 演算法的更新步長分別設定為 0.01、0.05、0.01, THF-FxLMS 演算法的更新步長分別設定為 0.01、0.01、0.01 , 本表給出的結果是用發動機噪聲和一個\(\eta^2\)= 0.1的非線性系統得到的 ,"Unprocessed"表示沒有ANC的結果, 通過比較主通路信號d(t)與底層語音成分得到unprocessed信號的STOI和PESQ值,表 2中的第二列顯示了使用噪聲信號測驗時的 NMSE 值,可以看出,在僅噪聲情況下進行測驗時,CRN-ns 的性能與 CRN-n 的性能相當,即使前者的模型是用嘈雜的語音訓練的,對于含噪語音的情況,由于語音是信噪比為正的含噪語音中的主要成分,因此總體性能在NMSE方面有所下降,CRN-n模型仍然具有最好的性能,所有信噪比下的NMSE值均低于-8.6dB,也就是說,CRN-n 模型將含噪語音視為“一般噪聲”,它能夠衰減噪聲以及含噪的語音,用含噪語音訓練的 CRN-ns 模型旨在去除含噪語音中的噪聲分量,誤差信號相對應于干凈語音的估計,我們使用STOI和PESQ來評估保留語音成分的性能,如表所示,CRN-ns由于具有選擇性衰減噪聲的能力,提高了客觀可懂度和語音質量,例如,在信噪比為5dB的情況下,STOI改善約為0.05、PESQ的提高約為0.3,CRN-ns ( -1 )和CRN-ns ( -2 )的性能與CRN-ns相當,PESQ略有下降,傳統的方法和CRN-n側重于最小化誤差信號(衰減參考信號),因此會使語音成分失真,表現為STOI和PESQ值比未處理的含噪語音低很多,
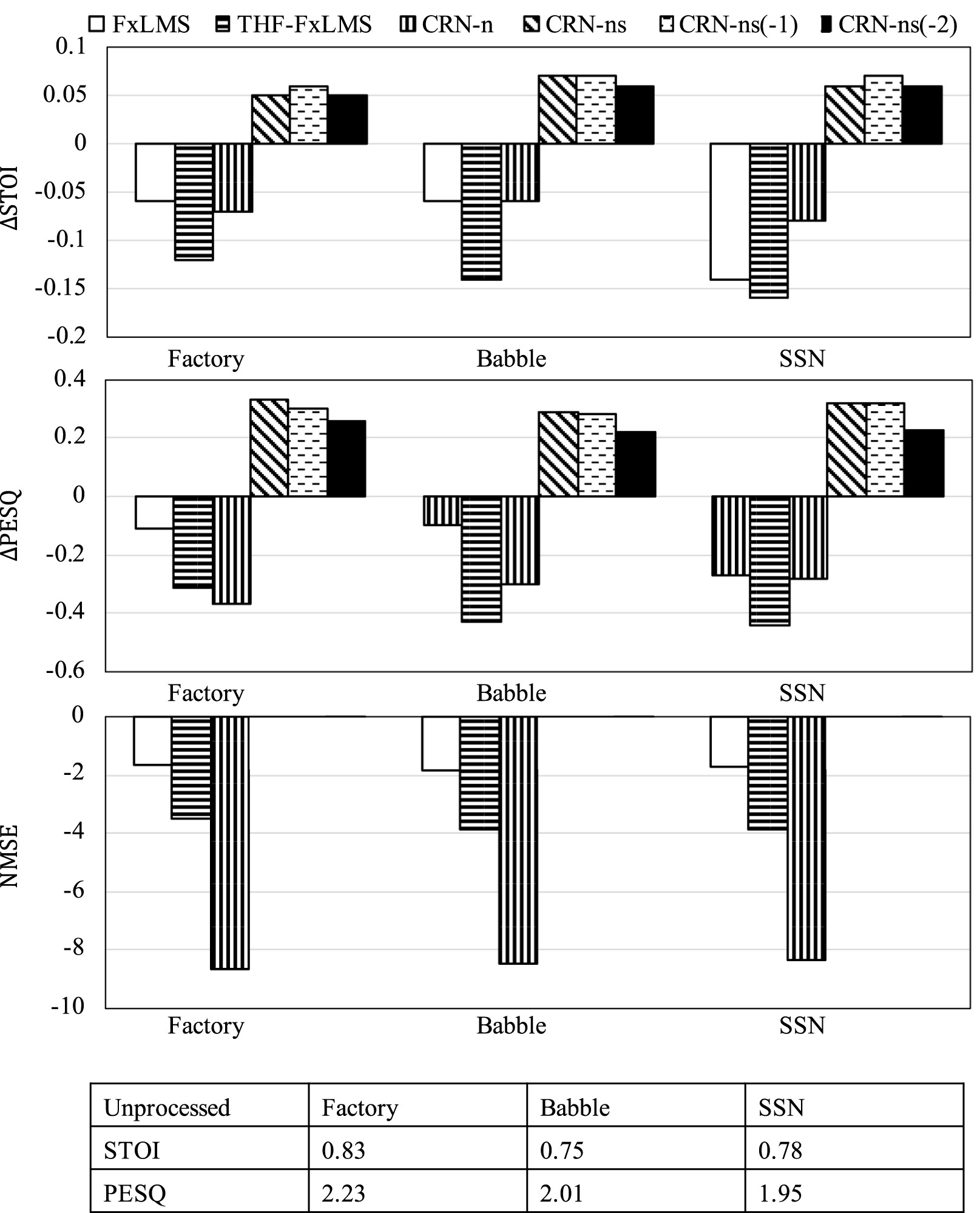
將深度ANC方法在5 d B信噪比下分別用工廠噪聲、babble噪聲和SSN語音下進行測驗,以顯示其對不同噪聲的魯棒性,為了清楚地顯示STOI和PESQ的改進,我們定義ΔSTOI和ΔPESQ表示ANC引入的這些度量的差異,圖 9繪制了這些值和NMSE值,可以看出FxLMS、THF-FxLMS 和 CRN-n 的 ΔSTOI和ΔPESQ值均低于零,用帶噪語音訓練的模型(CRN-ns、CRN-ns(-1) 和 CRN-ns(-2))很好地泛化到未經訓練的噪聲,并且能夠選擇性地衰減帶噪語音的噪聲分量,從而提高客觀語音可懂度和質量,
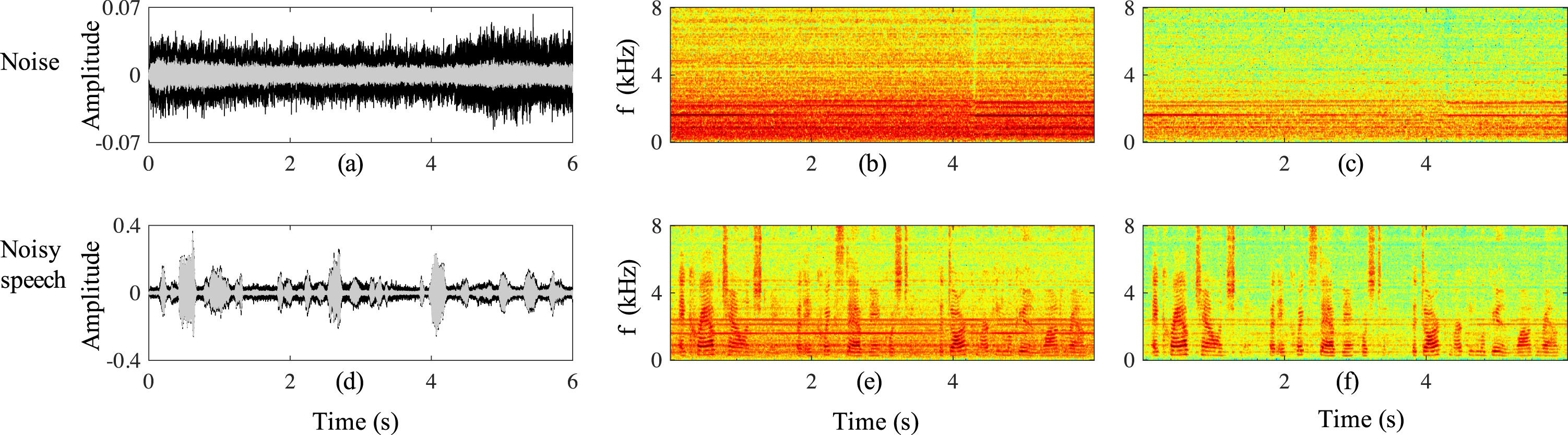
非線性度η 2 = 0.1的CRN - ns的波形和譜圖如圖10所示,其中第一行顯示了發動機噪聲測驗結果,第二行顯示了噪聲語音在5 dB信噪比下測驗結果,不言而喻,用含噪語音訓練的深層ANC系統(CRN-ns)不僅可以衰減含噪語音中的噪聲成分,而且在參考信號中沒有語音時也可以抵消噪聲,
5.3 . 安靜區域
迄今為止,我們主要關注空間給定點處的噪聲衰減,一個更具挑戰性和可取性的任務將是在一個小的空間區域內實作主動噪聲控制,稱為安靜區 (Kuo et al., 2004, Zhu et al., 2020) ,為了實作一個安靜區,在訓練程序中,通過將模型暴露在一個小區域內的各種RIR中,深度ANC可以以單獨的RIR方式進行訓練,具體來說,我們將安靜區模擬為半徑為5厘米的球體,如車內司機大約一只耳朵的區域,我們在球面內隨機選取100個點作為誤差傳聲器的位置,利用影像法 (Allen & Berkley, 1979) 生成100對主、次路徑的RIR,在每個情況下用這100對RIR分別針對純噪聲和含噪語音創建2萬個訓練信號,并用這些資料訓練CRN-n和CRN-ns模型,生成三個測驗集,每個測驗集包含100個信號,用于評估這些模型的性能,
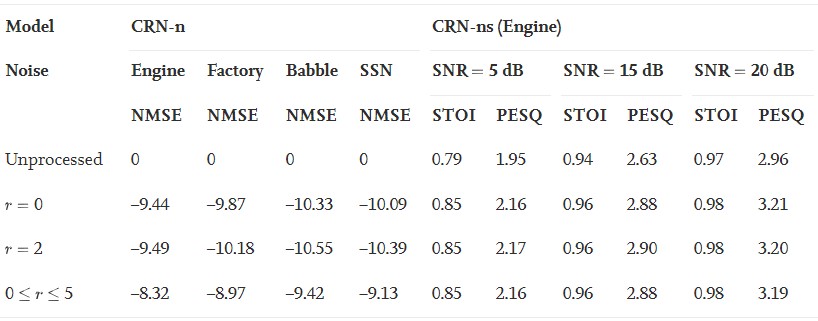
結果如表3所示,其中r表示距離區域中心的距離,對于 r=0 的情況,通過將誤差麥克風放置在球心產生測驗信號,對于 r = 2,測驗集是通過將麥克風放置在距離中心點2厘米的球面內生成的,對于 0≤r≤5,我們將誤差麥克風隨機放置在球內的10 個不同點上,并使用相應的 10 對 RIR 來創建測驗集,CRN-n模型對球內有發動機噪聲的帶噪語音產生8.32 dB的NMSE,CRN-ns模型對球內5dB信噪比的發動機噪聲STOI和PESQ分別得到0.06和0.21的改善,表3中的其他測驗條件也觀察到類似的NMSE、STOI和PESQ改進量,一般來說,用這種方法訓練的深層ANC模型在保持語音的同時,在該范圍內的任一點都能實作大幅度的噪聲衰減,從而產生一個安靜區,
5.4 . 深度 ANC 的穩健性
在ANC應用中,參考信號會發生很多變化,如信噪比、噪聲型別以及參考信號中同時存在多個噪聲,為了檢驗所提演算法對這些變化的魯棒性,我們分別在4種情況下對第5.1節和5.2節訓練的模型進行評估,首先,參考信號在3 s后,含發動機噪聲參考信號的信噪比從5 dB變化到20 dB,其次,參考信號的噪聲型別在3 s后由發動機噪聲變為工廠噪聲,第三,參考信號是發動機噪聲和工廠噪聲的混合信號,第2種和第3種情況的信噪比水平設定為5dB,第四,我們從TIMIT資料集中隨機選取20個未受過訓練的說話人(10男 10女),并創建100個測驗信號( 5dB的信噪比發動機噪聲)來評估深度ANC在未受過訓練說話人條件下的性能,結果見表4,以含噪語音為參考信號得到‘含噪語音’的結果,以含噪語音的噪聲分量為參考信號得到‘只有噪聲’結果,本表所示結果證明了深度ANC方法的強魯棒性,

5.5 . 使用不同的非線性 ANC 設定進行比較
我們在本節中考慮不同的非線性ANC設定,并將深度ANC演算法的性能與基于Volterra濾波器的演算法和基于神經網路的演算法進行了比較,實驗按照 Guo et al. (2018) 和Zhou and DeBrunner (2007) 進行設定,
主路徑采用Volterra級數建模,主噪聲d (t)與參考信號x(t)的關系定義為 (Guo et al., 2018, Zhou and DeBrunner, 2007)
\[\begin{aligned}d(t)=& x(t)+0.8 x(t-1)+0.3 x(t-2)+0.4 x(t-3) \\&-0.8 x(t) x(t-1)+0.9 x(t) x(t-2)+0.7 x(t) x(t-3)\end{aligned}\tag{9} \]次級路徑建模為 Zhou and DeBrunner (2007) 介紹的非線性-線性( NL )結構,在NL結構中,抵消信號y ( t )依次通過一個非線性模型(記為N )和一個z域的FIR濾波器(記為l(z)得到抵消噪聲a(t),
\[N[y(t)]=3.3 \tanh [0.3 y(t)]\tag{10} \]\[l(z)=1+0.2 z^{-1}+0.05 z^{-2}\tag{11} \]我們利用FxLMS結構( VFxLMS )實作了自適應Volterra控制器, Guo et al. (2018)和Tan and Jiang (2001) ,采用二階Volterra濾波器對VFxLMS演算法的有源噪聲控制器和次級路徑進行建模,其記憶體大小為10,步長設定為如 Guo et al. (2018) 所給出的,
基于神經網路的非線性ANC方法是對FxLMS演算法的擴展,是將控制器建模為MLP (Chang and Luoh, 2007, Zhou et al., 2005) ,這種方法可以表示為FxMLP,其利用梯度下降 (Chang & Luoh, 2007) 自適應更新MLP的權值,MLP有6個輸入,2個隱含層,每層12個神經元,輸出層1個神經元,隱層激活函式為Sigmoid函式,最后一層為線性函式,
對于深度ANC,我們從10 000個噪聲中再產生20 000個訓練信號,重新訓練CRN-n模型,這些訓練信號是按照4.2節的描述產生的,除主路徑和次路徑被(9)、(10)、(11)所述路徑所代替,
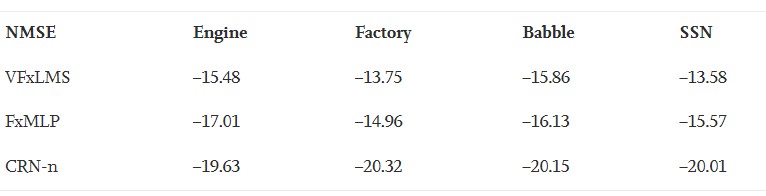
CRN-n、VFxLMS和FxMLP分別針對之前使用的4種噪聲進行評估,每種工況產生100個噪聲信號,比較結果見表5,可以看出,所有這些方法都能有效地抑制非線性ANC系統的噪聲,并且深度ANC系統始終優于其他兩種方法,
6 . 結論
在本文中,我們介紹了用于主動噪聲控制的深度 ANC 方法,采用卷積回圈網路從參考信號中估計抵消信號,從而去除或衰減初級噪聲,使用適當的訓練資料和損失函式,可以訓練深度 ANC 系統不僅可以消除噪聲,還可以選擇性地消除嘈雜語音中的噪聲分量,我們還提出了一種時延補償的訓練策略來解決頻域ANC方法的時延問題,此外,該方法能夠在空間區域內實作ANC,通過NMSE、STOI和PESQ的系統評價,證明了深度ANC模型在僅含噪聲和含噪語音情況下對噪聲衰減的有效性和魯棒性,該模型對不同的語音變化具有良好的泛化能力,
深度ANC方法比傳統方法具有重大優勢,它具有實作在ANC系統中不可回避的非線性建模的內在能力,深度ANC在訓練目標方面是靈活的,例如,它可以在有噪聲的語音甚至有噪聲的音樂中實作噪聲抵消,使用單個抵消揚聲器可以產生安靜區,而自適應濾波方法需要多個揚聲器,與傳統方法不同,深度ANC對寬帶噪聲的去除是有效的,最后,延遲補償策略除了解決頻域演算法中的延遲困難外,顯著擴大了ANC中因果關系的范圍,
未來的作業包括探索深度ANC的時域方法,評估深度ANC對誤差麥克風位置變化引起的RIR變化的魯棒性,以及將深度ANC擴展到多通道版本,此外,在今后的研究中將考慮諸如計算復雜度和設備實作等實際問題,
References
-
Agerkvist, 2007
Agerkvist F.Modelling loudspeaker non-linearitiesAudio engineering society conference: 32nd international conference: dsp for loudspeakers (2007)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Modelling loudspeaker non-linearities&publication_year=2007&author=F. Agerkvist)
-
Allen and Berkley, 1979
Allen J.B., Berkley D.A.Image method for efficiently simulating small-room acousticsJournal of the Acoustical Society of America, 65 (1979), pp. 943-950[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Image method for efficiently simulating small-room acoustics&publication_year=1979&author=J.B. Allen&author=D.A. Berkley)
-
Bambang, 2008
Bambang R.T.Adjoint EKF learning in recurrent neural networks for nonlinear active noise controlApplied Soft Computing, 8 (2008), pp. 1498-1504ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Adjoint EKF learning in recurrent neural networks for nonlinear active noise control&publication_year=2008&author=R.T. Bambang)
-
Bendel et al., 2001
Bendel Y., Burshtein D., Shalvi O., Weinstein E.Delayless frequency domain acoustic echo cancellationIEEE Transactions on Speech and Audio Processing, 9 (2001), pp. 589-597View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Delayless frequency domain acoustic echo cancellation&publication_year=2001&author=Y. Bendel&author=D. Burshtein&author=O. Shalvi&author=E. Weinstein)
-
Bershad, 1990
Bershad N.J.On weight update saturation nonlinearities in LMS adaptationIEEE Transactions on Acoustics, Speech and Signal Processing, 38 (4) (1990), pp. 623-630View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=On weight update saturation nonlinearities in LMS adaptation&publication_year=1990&author=N.J. Bershad)
-
Bouchard et al., 1999
Bouchard M., Paillard B., Le Dinh C.T.Improved training of neural networks for the nonlinear active control of sound and vibrationIEEE Transactions on Neural Networks, 10 (1999), pp. 391-401View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Improved training of neural networks for the nonlinear active control of sound and vibration&publication_year=1999&author=M. Bouchard&author=B. Paillard&author=C.T. Le Dinh)
-
Chang and Luoh, 2007
Chang C.Y., Luoh F.B.Enhancement of active noise control using neural-based filtered-x algorithmJournal of Sound and Vibration, 305 (2007), pp. 348-356ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Enhancement of active noise control using neural-based filtered-x algorithm&publication_year=2007&author=C.Y. Chang&author=F.B. Luoh)
-
Cheer, 2012
Cheer J.Active control of the acoustic environment in an automobile cabin(Ph.D. thesis)University of Southampton (2012)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active control of the acoustic environment in an automobile cabin&publication_year=2012&author=J. Cheer)
-
Chen et al., 2016
Chen J., Wang Y., Yoho S.E., Wang D.L., Healy E.W.Large-scale training to increase speech intelligibility for hearing-impaired listeners in novel noisesJournal of the Acoustical Society of America, 139 (2016), pp. 2604-2612[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Large-scale training to increase speech intelligibility for hearing-impaired listeners in novel noises&publication_year=2016&author=J. Chen&author=Y. Wang&author=S.E. Yoho&author=D.L. Wang&author=E.W. Healy)
-
Chen and Zhang, 2011
Chen W., Zhang Z.Nonlinear adaptive learning control for unknown time-varying parameters and unknown time-varying delaysAsian Journal of Control, 13 (2011), pp. 903-913[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Nonlinear adaptive learning control for unknown time-varying parameters and unknown time-varying delays&publication_year=2011&author=W. Chen&author=Z. Zhang)
-
Clevert et al., 2015
Clevert D.-A., Unterthiner T., Hochreiter S.Fast and accurate deep network learning by exponential linear units (elus)(2015)arXiv preprint arXiv:1511.07289[Google Scholar](https://scholar.google.com/scholar?q=Fast and accurate deep network learning by exponential linear units)
-
Costa et al., 2002
Costa M.H., Bermudez J.C.M., Bershad N.J.Stochastic analysis of the filtered-x LMS algorithm in systems with nonlinear secondary pathsIEEE Transactions on Signal Processing, 50 (2002), pp. 1327-1342View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Stochastic analysis of the filtered-x LMS algorithm in systems with nonlinear secondary paths&publication_year=2002&author=M.H. Costa&author=J.C.M. Bermudez&author=N.J. Bershad)
-
Das and Panda, 2004
Das D.P., Panda G.Active mitigation of nonlinear noise processes using a novel filtered-s LMS algorithmIEEE Transactions on Speech and Audio Processing, 12 (2004), pp. 313-322View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active mitigation of nonlinear noise processes using a novel filtered-s LMS algorithm&publication_year=2004&author=D.P. Das&author=G. Panda)
-
Elliott et al., 1987
Elliott S., Stothers I., Nelson P.A multiple error LMS algorithm and its application to the active control of sound and vibrationIEEE Transactions on Acoustics, Speech and Signal Processing, 35 (1987), pp. 1423-1434View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=A multiple error LMS algorithm and its application to the active control of sound and vibration&publication_year=1987&author=S. Elliott&author=I. Stothers&author=P. Nelson)
-
Fu et al., 2017
Fu S.-W., Hu T.-y., Tsao Y., Lu X.Complex spectrogram enhancement by convolutional neural network with multi-metrics learningIEEE 27th international workshop on machine learning for signal processing (2017), pp. 1-6[Google Scholar](https://scholar.google.com/scholar_lookup?title=Complex spectrogram enhancement by convolutional neural network with multi-metrics learning&publication_year=2017&author=S.-W. Fu&author=T.-y. Hu&author=Y. Tsao&author=X. Lu)
-
Gao et al., 2018
Gao, F., Wu, L., Zhao, L., Qin, T., Cheng, X., & Liu, T.-Y. (2018). Efficient sequence learning with group recurrent networks. In Proceedings of the 2018 conference of the north american chapter of the association for computational linguistics: human language technologies (pp. 799–808).[Google Scholar](https://scholar.google.com/scholar?q=Gao, F., Wu, L., Zhao, L., Qin, T., Cheng, X., Liu, T.-Y. . Efficient sequence learning with group recurrent networks. In Proceedings of the 2018 conference of the north american chapter of the association for computational linguistics: human language technologies .)
-
George and Panda, 2013
George N.V., Panda G.Advances in active noise control: A survey, with emphasis on recent nonlinear techniquesSignal Processing, 93 (2013), pp. 363-377ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Advances in active noise control%3A A survey%2C with emphasis on recent nonlinear techniques&publication_year=2013&author=N.V. George&author=G. Panda)
-
Ghasemi et al., 2016
Ghasemi S., Kamil R., Marhaban M.H.Nonlinear THF-FXLMS algorithm for active noise control with loudspeaker nonlinearityAsian Journal of Control, 18 (2016), pp. 502-513[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Nonlinear THF-FXLMS algorithm for active noise control with loudspeaker nonlinearity&publication_year=2016&author=S. Ghasemi&author=R. Kamil&author=M.H. Marhaban)
-
Goodwin et al., 2010
Goodwin G.C., Silva E.I., Quevedo D.E.Analysis and design of networked control systems using the additive noise model methodologyAsian Journal of Control, 12 (2010), pp. 443-459View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Analysis and design of networked control systems using the additive noise model methodology&publication_year=2010&author=G.C. Goodwin&author=E.I. Silva&author=D.E. Quevedo)
-
Guo et al., 2018
Guo X., Li Y., Jiang J., Dong C., Du S., Tan L.Sparse modeling of nonlinear secondary path for nonlinear active noise controlIEEE Transactions on Instrumentation and Measurement, 67 (3) (2018), pp. 482-496[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Sparse modeling of nonlinear secondary path for nonlinear active noise control&publication_year=2018&author=X. Guo&author=Y. Li&author=J. Jiang&author=C. Dong&author=S. Du&author=L. Tan)
-
Hartmann, 2004
Hartmann W.M.Signals, sound, and sensationSpringer Science & Business Media (2004)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Signals%2C sound%2C and sensation&publication_year=2004&author=W.M. Hartmann)
-
Huang and Xu, 2012
Huang D., Xu J.-X.Discrete-time adaptive control for nonlinear systems with periodic parameters: A lifting approachAsian Journal of Control, 14 (2012), pp. 373-383[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Discrete-time adaptive control for nonlinear systems with periodic parameters%3A A lifting approach&publication_year=2012&author=D. Huang&author=J.-X. Xu)
-
Ioffe and Szegedy, 2015
Ioffe S., Szegedy C.Batch normalization: Accelerating deep network training by reducing internal covariate shift(2015)arXiv preprint arXiv:1502.03167[Google Scholar](https://scholar.google.com/scholar_lookup?title=Batch normalization%3A Accelerating deep network training by reducing internal covariate shift&publication_year=2015&author=S. Ioffe&author=C. Szegedy)
-
Kestell, 2000
Kestell C.D.Active control of sound in a small single engine aircraft cabin with virtual error sensors(Ph.D. thesis)Adelaide University (2000)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active control of sound in a small single engine aircraft cabin with virtual error sensors&publication_year=2000&author=C.D. Kestell)
-
Kim et al., 1994
Kim I.-S., Na H.-S., Kim K.-J., Park Y.Constraint filtered-x and filtered-u least-mean-square algorithms for the active control of noise in ductsJournal of the Acoustical Society of America, 95 (1994), pp. 3379-3389[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Constraint filtered-x and filtered-u least-mean-square algorithms for the active control of noise in ducts&publication_year=1994&author=I.-S. Kim&author=H.-S. Na&author=K.-J. Kim&author=Y. Park)
-
Klippel, 2006
Klippel W.Tutorial: Loudspeaker nonlinearities—Causes, parameters, symptomsJournal of the Audio Engineering Society, 54 (2006), pp. 907-939View Record in Scopus[Google Scholar](https://scholar.google.com/scholar?q=Tutorial: Loudspeaker nonlinearitiesCauses, parameters, symptoms)
-
Krukowicz, 2010
Krukowicz T.Active noise control algorithm based on a neural network and nonlinear input-output system identification modelArchives of Acoustics, 35 (2010), pp. 191-202View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active noise control algorithm based on a neural network and nonlinear input-output system identification model&publication_year=2010&author=T. Krukowicz)
-
Kuo and Morgan, 1999
Kuo S.M., Morgan D.R.Active noise control: a tutorial reviewProceedings of the IEEE, 87 (1999), pp. 943-973View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active noise control%3A a tutorial review&publication_year=1999&author=S.M. Kuo&author=D.R. Morgan)
-
Kuo and Wu, 2005
Kuo S.M., Wu H.-T.Nonlinear adaptive bilinear filters for active noise control systemsIEEE Transactions on Circuits and Systems. I. Regular Papers, 52 (2005), pp. 617-624View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Nonlinear adaptive bilinear filters for active noise control systems&publication_year=2005&author=S.M. Kuo&author=H.-T. Wu)
-
Kuo et al., 2004
Kuo S.M., Wu H.-T., Chen F.-K., Gunnala M.R.Saturation effects in active noise control systemsIEEE Transactions on Circuits and Systems. I. Regular Papers, 51 (2004), pp. 1163-1171View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Saturation effects in active noise control systems&publication_year=2004&author=S.M. Kuo&author=H.-T. Wu&author=F.-K. Chen&author=M.R. Gunnala)
-
Kuo et al., 2008
Kuo S.M., Yenduri R.K., Gupta A.Frequency-domain delayless active sound quality control algorithmJournal of Sound and Vibration, 318 (2008), pp. 715-724ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Frequency-domain delayless active sound quality control algorithm&publication_year=2008&author=S.M. Kuo&author=R.K. Yenduri&author=A. Gupta)
-
Lamel et al., 1989
Lamel L.F., Kassel R.H., Seneff S.Speech database development: Design and analysis of the acoustic-phonetic corpusSpeech input/output assessment and speech databases (1989)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Speech database development%3A Design and analysis of the acoustic-phonetic corpus&publication_year=1989&author=L.F. Lamel&author=R.H. Kassel&author=S. Seneff)
-
Lashkari, 2006
Lashkari K.A novel Volterra-Wiener model for equalization of loudspeaker distortions2006 IEEE international conference on acoustics speech and signal processing proceedings (2006), p. V[Google Scholar](https://scholar.google.com/scholar_lookup?title=A novel Volterra-Wiener model for equalization of loudspeaker distortions&publication_year=2006&author=K. Lashkari)
-
Lau and Tang, 2000
Lau S., Tang S.Sound fields in a slightly damped rectangular enclosure under active controlJournal of Sound and Vibration, 238 (2000), pp. 637-660ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Sound fields in a slightly damped rectangular enclosure under active control&publication_year=2000&author=S. Lau&author=S. Tang)
-
Manolakis et al., 2000
Manolakis D.G., Ingle V.K., Kogon S.M., et al.Statistical and adaptive signal processing: spectral estimation, signal modeling, adaptive filtering, and array processingMcGraw-Hill Boston (2000)[Google Scholar](https://scholar.google.com/scholar_lookup?title=Statistical and adaptive signal processing%3A spectral estimation%2C signal modeling%2C adaptive filtering%2C and array processing&publication_year=2000&author=D.G. Manolakis&author=V.K. Ingle&author=S.M. Kogon)
-
Napoli and Piroddi, 2009
Napoli R., Piroddi L.Nonlinear active noise control with NARX modelsIEEE Transactions on Audio, Speech, and Language Processing, 18 (2009), pp. 286-295[Google Scholar](https://scholar.google.com/scholar_lookup?title=Nonlinear active noise control with NARX models&publication_year=2009&author=R. Napoli&author=L. Piroddi)
-
Panda and Das, 2003
Panda G., Das D.P.Functional link artificial neural network for active control of nonlinear noise processes2003 international workshop on acoustic echo and noise control (2003), pp. 163-166[ View PDF](javascript:??CrossRef[Google Scholar](https://scholar.google.com/scholar_lookup?title=Functional link artificial neural network for active control of nonlinear noise processes&publication_year=2003&author=G. Panda&author=D.P. Das)
-
Park et al., 2001
Park S.J., Yun J.H., Park Y.C., Youn D.H.A delayless subband active noise control system for wideband noise controlIEEE Transactions on Speech and Audio Processing, 9 (2001), pp. 892-899View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=A delayless subband active noise control system for wideband noise control&publication_year=2001&author=S.J. Park&author=J.H. Yun&author=Y.C. Park&author=D.H. Youn)
-
Reddi et al., 2019
Reddi S.J., Kale S., Kumar S.On the convergence of adam and beyond(2019)arXiv preprint arXiv:1904.09237[Google Scholar](https://scholar.google.com/scholar_lookup?title=On the convergence of adam and beyond&publication_year=2019&author=S.J. Reddi&author=S. Kale&author=S. Kumar)
-
Rix et al., 2001
Rix A.W., Beerends J.G., Hollier M.P., Hekstra A.P.Perceptual evaluation of speech quality (PESQ)-a new method for speech quality assessment of telephone networks and codecs2001 IEEE international conference on acoustics, speech, and signal processing. proceedings (Cat. No. 01CH37221) (2001), pp. 749-752[Google Scholar](https://scholar.google.com/scholar?q=Perceptual evaluation of speech quality -a new method for speech quality assessment of telephone networks and codecs)
-
Rout et al., 2015
Rout N.K., Das D.P., Panda G.Computationally efficient algorithm for high sampling-frequency operation of active noise controlMechanical Systems and Signal Processing, 56 (2015), pp. 302-319ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Computationally efficient algorithm for high sampling-frequency operation of active noise control&publication_year=2015&author=N.K. Rout&author=D.P. Das&author=G. Panda)
-
Samarasinghe et al., 2016
Samarasinghe P.N., Zhang W., Abhayapala T.D.Recent advances in active noise control inside automobile cabins: Toward quieter carsIEEE Signal Processing Magazine, 33 (2016), pp. 61-73View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Recent advances in active noise control inside automobile cabins%3A Toward quieter cars&publication_year=2016&author=P.N. Samarasinghe&author=W. Zhang&author=T.D. Abhayapala)
-
Snyder and Tanaka, 1995
Snyder S.D., Tanaka N.Active control of vibration using a neural networkIEEE Transactions on Neural Networks, 6 (1995), pp. 819-828View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active control of vibration using a neural network&publication_year=1995&author=S.D. Snyder&author=N. Tanaka)
-
Sommerfeldt et al., 1995
Sommerfeldt, S. D., Parkins, J. W., & Park, Y. C. (1995). Global active noise control in rectangular enclosures. In Proceedings of the inter-noise and noise-con congress and conference (pp. 477–488).[Google Scholar](https://scholar.google.com/scholar?q=Sommerfeldt, S. D., Parkins, J. W., Park, Y. C. . Global active noise control in rectangular enclosures. In Proceedings of the inter-noise and noise-con congress and conference .)
-
Taal et al., 2011
Taal C.H., Hendriks R.C., Heusdens R., Jensen J.An algorithm for intelligibility prediction of time–frequency weighted noisy speechIEEE Transactions on Audio, Speech, and Language Processing, 19 (2011), pp. 2125-2136View Record in Scopus[Google Scholar](https://scholar.google.com/scholar?q=An algorithm for intelligibility prediction of timefrequency weighted noisy speech)
-
Tan and Jiang, 2001
Tan L., Jiang J.Adaptive Volterra filters for active control of nonlinear noise processesIEEE Transactions on Signal Processing, 49 (2001), pp. 1667-1676View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Adaptive Volterra filters for active control of nonlinear noise processes&publication_year=2001&author=L. Tan&author=J. Jiang)
-
Tan and Wang, 2019a
Tan K., Wang D.L.Complex spectral mapping with a convolutional recurrent network for monaural speech enhancement2019 IEEE international conference on acoustics, speech and signal processing (2019), pp. 6865-6869[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Complex spectral mapping with a convolutional recurrent network for monaural speech enhancement&publication_year=2019&author=K. Tan&author=D.L. Wang)
-
Tan and Wang, 2019b
Tan K., Wang D.L.Learning complex spectral mapping with gated convolutional recurrent networks for monaural speech enhancementIEEE/ACM Transactions on Audio, Speech, and Language Processing, 28 (2019), pp. 380-390[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Learning complex spectral mapping with gated convolutional recurrent networks for monaural speech enhancement&publication_year=2019&author=K. Tan&author=D.L. Wang)
-
Tarabini and Roure, 2008
Tarabini M., Roure A.Modeling of influencing parameters in active noise control on an enclosure wallJournal of Sound and Vibration, 311 (2008), pp. 1325-1339ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Modeling of influencing parameters in active noise control on an enclosure wall&publication_year=2008&author=M. Tarabini&author=A. Roure)
-
Tobias and Seara, 2005
Tobias O.J., Seara R.Leaky-FXLMS algorithm: stochastic analysis for Gaussian data and secondary path modeling errorIEEE Transactions on Speech and Audio Processing, 13 (2005), pp. 1217-1230View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Leaky-FXLMS algorithm%3A stochastic analysis for Gaussian data and secondary path modeling error&publication_year=2005&author=O.J. Tobias&author=R. Seara)
-
Tobias and Seara, 2006
Tobias O.J., Seara R.On the LMS algorithm with constant and variable leakage factor in a nonlinear environmentIEEE Transactions on Signal Processing, 54 (9) (2006), pp. 3448-3458View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=On the LMS algorithm with constant and variable leakage factor in a nonlinear environment&publication_year=2006&author=O.J. Tobias&author=R. Seara)
-
Tokhi and Wood, 1997
Tokhi M., Wood R.Active noise control using radial basis function networksControl Engineering Practice, 5 (1997), pp. 1311-1322ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Active noise control using radial basis function networks&publication_year=1997&author=M. Tokhi&author=R. Wood)
-
Varga and Steeneken, 1993
Varga A., Steeneken H.J.Assessment for automatic speech recognition: II. NOISEX-92: A database and an experiment to study the effect of additive noise on speech recognition systemsSpeech Communication, 12 (1993), pp. 247-251ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Assessment for automatic speech recognition%3A II. NOISEX-92%3A A database and an experiment to study the effect of additive noise on speech recognition systems&publication_year=1993&author=A. Varga&author=H.J. Steeneken)
-
Wang and Chen, 2018
Wang D.L., Chen J.Supervised speech separation based on deep learning: An overviewIEEE/ACM Transactions on Audio, Speech, and Language Processing, 26 (2018), pp. 1702-1726[ View PDF](javascript:??CrossRef[Google Scholar](https://scholar.google.com/scholar_lookup?title=Supervised speech separation based on deep learning%3A An overview&publication_year=2018&author=D.L. Wang&author=J. Chen)
-
Williamson et al., 2016
Williamson D.S., Wang Y., Wang D.L.Complex ratio masking for joint enhancement of magnitude and phase2016 IEEE international conference on acoustics, speech and signal processing (2016), pp. 5220-5224View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Complex ratio masking for joint enhancement of magnitude and phase&publication_year=2016&author=D.S. Williamson&author=Y. Wang&author=D.L. Wang)
-
Yang et al., 2018
Yang F., Cao Y., Wu M., Albu F., Yang J.Frequency-domain filtered-x LMS algorithms for active noise control: a review and new insightsApplied Sciences, 8 (2018), p. 2313[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Frequency-domain filtered-x LMS algorithms for active noise control%3A a review and new insights&publication_year=2018&author=F. Yang&author=Y. Cao&author=M. Wu&author=F. Albu&author=J. Yang)
-
Zhang et al., 2006
Zhang Q.-Z., Gan W.-S., Zhou Y.-l.Adaptive recurrent fuzzy neural networks for active noise controlJournal of Sound and Vibration, 296 (2006), pp. 935-948ArticleDownload PDFView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Adaptive recurrent fuzzy neural networks for active noise control&publication_year=2006&author=Q.-Z. Zhang&author=W.-S. Gan&author=Y.-l. Zhou)
-
Zhang and Wang, 2020
Zhang, H., & Wang, D. L. (2020). A deep learning approach to active noise control. In Proceedings of the 2020 conference of the international speech communication association (pp. 1141–1145).[Google Scholar](https://scholar.google.com/scholar?q=Zhang, H., Wang, D. L. . A deep learning approach to active noise control. In Proceedings of the 2020 conference of the international speech communication association .)
-
Zhou and DeBrunner, 2007
Zhou D., DeBrunner V.Efficient adaptive nonlinear filters for nonlinear active noise controlIEEE Transactions on Circuits and Systems. I. Regular Papers, 54 (3) (2007), pp. 669-681View Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=Efficient adaptive nonlinear filters for nonlinear active noise control&publication_year=2007&author=D. Zhou&author=V. DeBrunner)
-
Zhou et al., 2005
Zhou Y.-L., Zhang Q.-Z., Li X.-D., Gan W.-S.Analysis and DSP implementation of an ANC system using a filtered-error neural networkJournal of Sound and Vibration, 285 (1–2) (2005), pp. 1-25ArticleDownload PDF[Google Scholar](https://scholar.google.com/scholar_lookup?title=Analysis and DSP implementation of an ANC system using a filtered-error neural network&publication_year=2005&author=Y.-L. Zhou&author=Q.-Z. Zhang&author=X.-D. Li&author=W.-S. Gan)
-
Zhu et al., 2020
Zhu Q., Qiu X., Burnett I.An acoustic modelling based remote error sensing approach for quiet zone generation in a noisy environment2020 IEEE international conference on acoustics, speech and signal processing (2020), pp. 8424-8428[ View PDF](javascript:??CrossRefView Record in Scopus[Google Scholar](https://scholar.google.com/scholar_lookup?title=An acoustic modelling based remote error sensing approach for quiet zone generation in a noisy environment&publication_year=2020&author=Q. Zhu&author=X. Qiu&author=I. Burnett)
本文來自博客園,作者:{Ray963},轉載請注明原文鏈接:{https://www.cnblogs.com/ray93/}
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/470624.html
標籤:其他
上一篇:今日小隨筆
下一篇:柔性引數化彈簧建立