導航技術和我們的生活息息相關,行人導航系統是一種為行人提供導航服務的便攜式設備,可以適應地下、礦洞等衛星信號拒止的地區,以及大商場等拓撲結構復雜的地區,通常基于MIMU實作,本質上是慣性導航系統的一種,由于采用了 MIMU器件,行人導航系統也面臨精度差和誤差累積的問題,因此提高行人導航系統的精度、約束誤差發散是行人導航領域的熱門研究方向,
協同導航技術是提高行人導航精度的一種方案,通過多智能體系統進行節點間導航狀態共享、節點間資訊測量或者節點位置資訊及不確定性資訊存盤轉發的方式來提高各個節點的導航精度,
包含行人節點和無人車節點的多智能體系統是一類典型的異構多智能體系統,無人車通常可以搭載豐富的導航設備,比如相機、雷達、GNSS、高精度慣性傳感器等,具有較高的導航精度,此時在行人節點和無人車節點間運用協同導航技術,可以有效提升行人節點的導航精度,從而提升多智能體系統整體的任務能力,
哈爾濱工業大學的研究人員針對人車協同導航,提出了基于因子圖理論的協同導航系統模型,并引入遺傳演算法對導航狀態進行尋優完成資訊融合,
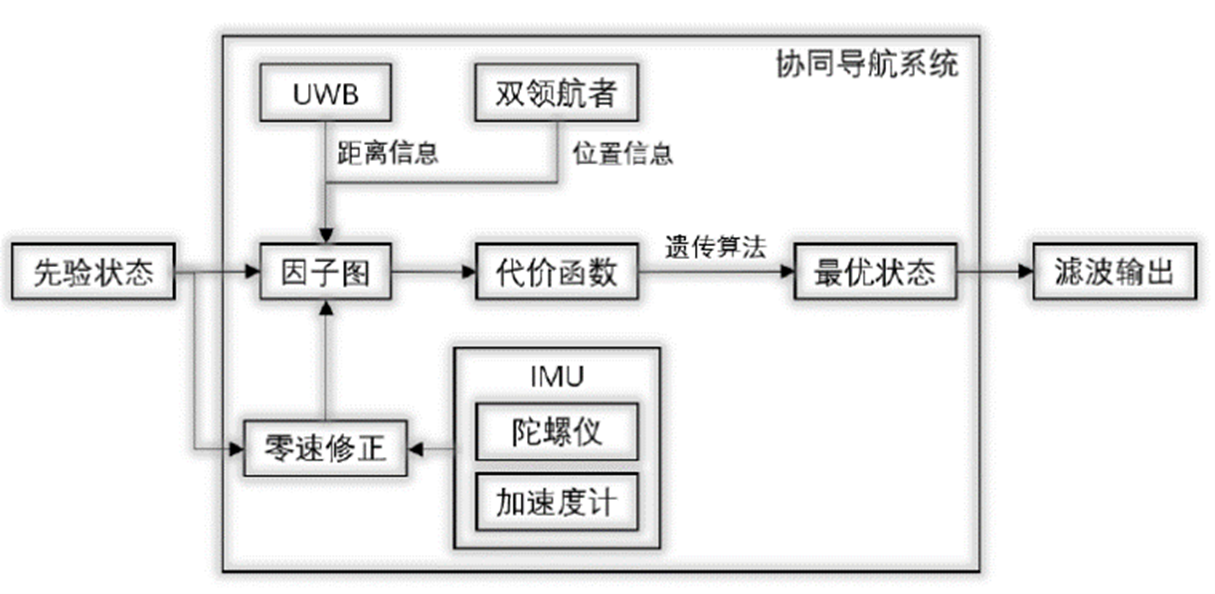
圖1-協同導航系統整體架構圖
系統中兩個節點由高導航精度的無人車構成,一個跟隨節點由行人導航體統構成,行人導航節點配備了一個基于 MEMS 技術的慣性測量單元用于測量行人足部的慣性資訊,無人車節點相對于導航坐標系的三維位置資訊由外部設備提供,無人車和行人導航節點上均配備了 UWB 測距設備,用于測量行人和無人車之間的距離,
圖2-粘貼了反游標識點的UWB基站
為了驗證基于因子圖和遺傳演算法的協同導航演算法,研究人員進行了行走導航實驗,實驗中,由兩個UWB基站充當雙領航者(替代無人車),其實時位置資訊由NOKOV度量動作捕捉系統提供,行人節點配備MIMU與UWB標簽,可以對行人節點的機體角速度、機體加速度以及與兩個領航節點間的距離進行測量,

圖3-NOKOV動作捕捉系統
實驗中共進行49.7m里程的行走,在行走程序中,MIMU 測量行人足部的機體角速度與加速度,UWB 器件測量行人足部與雙領航者之間的距離資訊,利用協同導航演算法對行人節點的導航狀態進行解算,由于NOKOV度量動作捕捉系統定位精度高,達到亞毫米級,實驗中將其獲取的定位資訊作為行人的真實軌跡值,
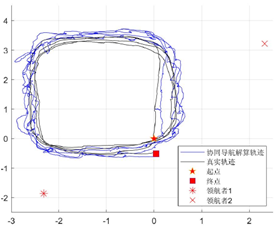
圖4-協同導航演算法解算軌跡圖
實驗通過對比協同導航演算法解算的行人節點軌跡值和NOKOV度量動作捕捉系統提供的真實軌跡值,完成了演算法的有效性和精確度檢驗,藍色軌跡為協同導航演算法解算的行人節點軌跡值,黑色軌跡為動作捕捉系統提供的真實軌跡,實驗驗證結論可得行走終點誤差為0.0648米,相對行走里程的誤差率為0.13%,符合演算法有效性驗證預期結果,
參考文獻:[1]黃燦. 基于因子圖的人車協同導航演算法[D].哈爾濱工業大學,2021.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/472375.html
標籤:其他
上一篇:GB/T 25000.51-2016 系統與軟體工程、系統與軟體質量要求和評價 第51部分
下一篇:紅日靶場(內網滲透)——1