近年來,各行各業逐步開展了自動化設備的研究,其中以無人機技術和機器人技術的發展尤為迅速,許多高校和科研單位正圍繞著這兩個方向進行多種應用場景的研究,
無人機領域
在無人機領域,常見的研究方向是多無人機編隊技術,這在科研中被稱為“多智能體協同控制”,研究者需要通過對無人機的定位,獲取其在空間中的位置,這種位置資訊主要是六自由度姿態資料,接著進行多智能體之間通訊的建立,最后通過控制決策系統,根據各智能體的空間位置,完成協同控制,通過此技術,可以應用于多個領域,如軍事中的“蜂群”作戰系統,電網、管道的無人機巡檢,文娛行業的無人機編隊表演,建筑行業的無人機智能建造等等,

上過19年春晚的撲翼機器人(無人機)-哈爾濱工業大學(深圳)
定位無人機的空間位置,是多智能體協同控制研究中最為重要的部分,只有獲取到準確而又穩定的定位資訊,才能良好地控制無人機,作為定位的傳統方法,慣性測量單元(IMU)和慣性導航模塊(INS)存在陀螺儀零點漂移嚴重,導致獲取的方位、姿態、速度等資料精度不高,存在誤差累計,很難長時間獨立作業,而光學動作捕捉系統憑借著高精度、高實時性、可在實驗室環境下模擬場景的特點,正逐漸被研究者們所青睞,其中北京理工大學自動化學院通過使用NOKOV(度量)光學三維動作捕捉系統,獲取亞毫米精度的無人機位姿資訊,結合多無人機即多智能體之間的通訊網路和控制決策系統,已經摸索出一套網路化多智能體空地協同控制實驗平臺,可以通過控制端遠程發送指令,讓無人機、無人車進行指定的編隊協作,
機器人領域
基于同樣的定位原理,機器人研究也正在多個領域中開花結果,應用于工業制造流水線、物流倉儲場景的機械臂,通過對其模塊化機械臂和靈巧手捕捉,獲取其姿態資料,進行相應的控制規劃;可在抗震救災、軍事場景應用的多足機器人,通過對其足部的關節角度、速度資訊的捕捉,優化其在不同環境下的運動模式;而殘障人士、特種士兵裝配上外骨骼機器人,在光學動作捕捉系統的協助下獲取關節角度等運動學步態資訊,優化外骨骼結構,從而更好地對佩戴者進行多方面的協助,使用同樣原理的還有康復機器人、仿人機器人等,
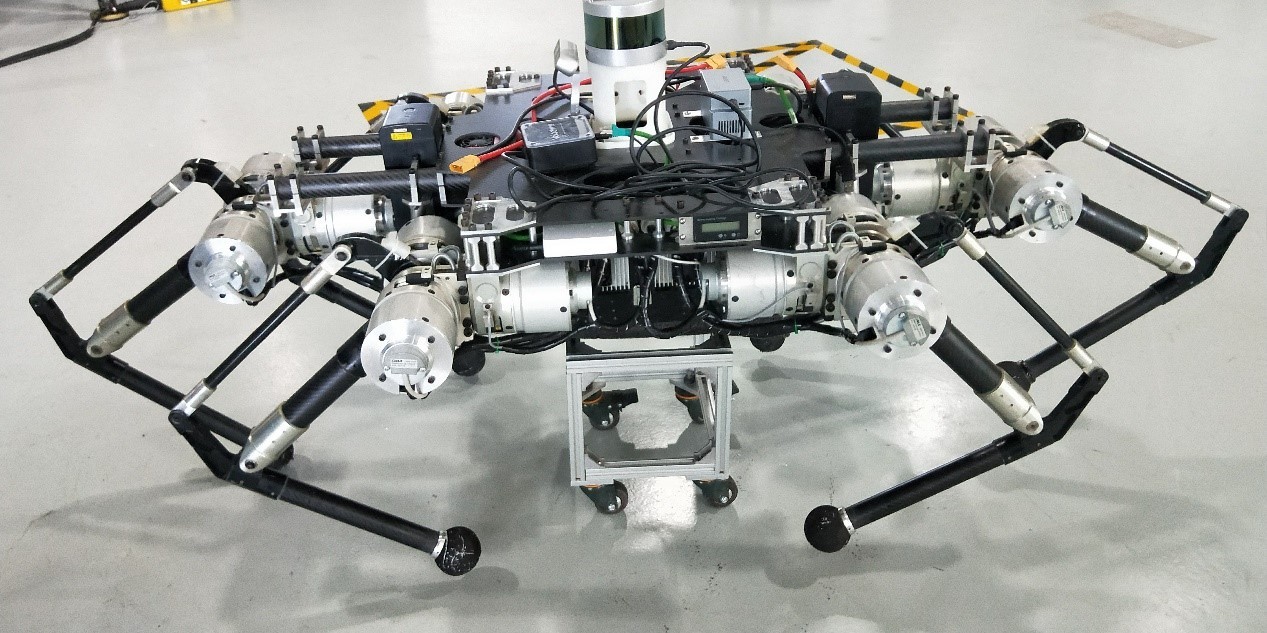
六足機器人-上海交通大學
除此之外,還有多種機器人的研究正在進行中,如哈爾濱工業大學深圳校區機電工程與自動化學院,使用NOKOV(度量)光學三維動作捕捉系統對撲翼機器人的“軀干”、“翅膀”進行定位分析,優化其飛行姿態;在同一實驗室,另一個課題組通過度量光學動作捕捉系統捕捉人手精密動作,構建仿人手機器人,意在提高流水線上細小零件組裝的效率,該用戶已根據該實驗發了兩篇EI文,證明了實驗的有效性,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/47487.html
標籤:其他
上一篇:快速生成1000W個小檔案
下一篇:hbase存盤設計問題