剛性機械臂在工業中已經有大量應用,但是在狹窄和環境復雜的場景中有很大局限性,受到蛇、象鼻、章魚臂等生物結構啟發的仿生連續體機器人應運而生,連續體機器人由連續關節組成,比傳統機器人有更好的柔順性,能更好的適應復雜環境,近年來連續體機器人在醫療、檢測等領域廣泛應用,
與剛性機械臂一樣,連續體機器人要實作精確的末端控制,也需要先進行運動學分析,四川大學和國網寧夏電力有限公司電力科學研究院的研究團隊以絲驅動連續體機器人為物件,提出一種適用于單段及多段連續體機器人的完整運動學通用分析方法,解決了連續體機器人作業空間至驅動空間逆映射難以求解的問題,

研究人員提出了一種分段常曲率與粒子群演算法相結合的完整正逆運動學研究方法, 以雙段連續體機器人為例,利用提出的完整運動學方法,在已知作業空間目標點位置后,即可通過逆運動學得到驅動量變化量,進而控制雙段連續體機器人末端到達目標點,
為了驗證連續體機器人完整運動學模型,除了進行了仿真,研究人員還按照設計模型制作了樣機,并搭建了實驗環境,實驗環境包括雙段連續體機器人樣機、電控系統和NOKOV度量光學動作捕捉系統,
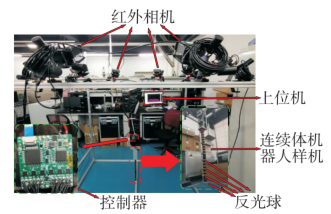
實驗中給定作業空間內任一目標點位置,利用基于粒子群演算法求得連續體機器人的關節變數,根據映射關系驅動絲達到相應變化量進而帶動機器人到達相應位置,實驗中將7個反游標識點分別固定在機器人末端及各段首尾及中間位置,利用8臺NOKOV度量動作捕捉相機進行定位跟蹤,獲取末端實際位置和實際臂型,
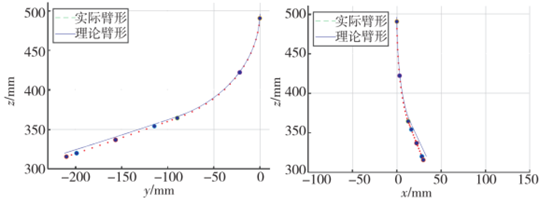
為探究雙段連續體機器人運動學效果,通過NOKOV度量動作捕捉系統采集各連續段首尾及中間三個反光球位置,利用三點坐標進行曲線擬合得到各段臂形曲線;按上述方法采集六個點位置資訊,即可得到雙段連續體機器人的實際臂形,NOKOV度量動作捕捉系統的空間定位精度達到亞毫米級,可以準確采集連續體機器人臂型,從實驗結果可以看出,研究人員所提的連續體機器人完整運動學方法具有一定的有效性和快速性,
參考文獻:[1]陳元科,馬飛越,向國菲,馬叢俊,陳磊,倪輝,佃松宜.用于絲驅動連續體機器人的實用運動學研究[J].計算機應用研究,2021,38(10):3085-3088+3103.DOI:10.19734/j.issn.1001-3695.2021.03.0060.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/499079.html
標籤:其他
下一篇:偽靜態頁面的SQL注入