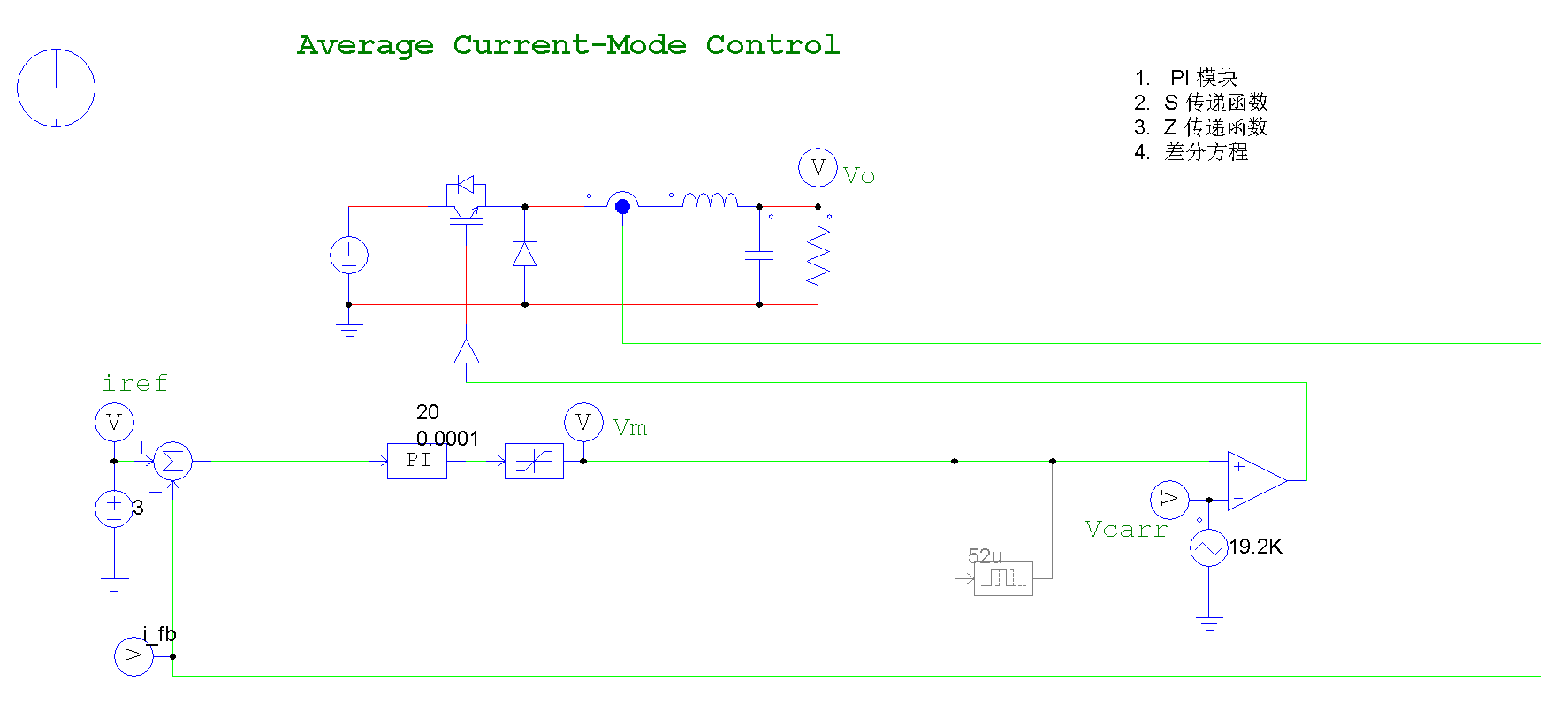
1. 利用PI 模塊仿真BUCK 電路電流環
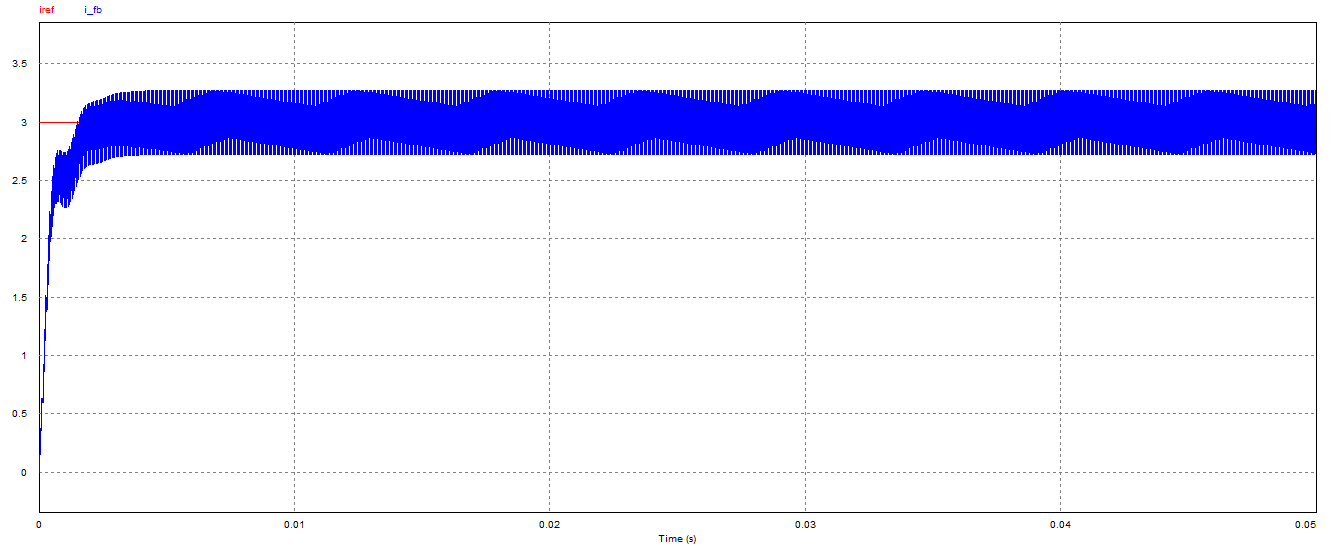
在調制通道上未加入延遲環節時,無論KP, KI 引數如何調整系統都是穩定的
仿真結果:
在調制通道上引入 一個開關周期的延遲
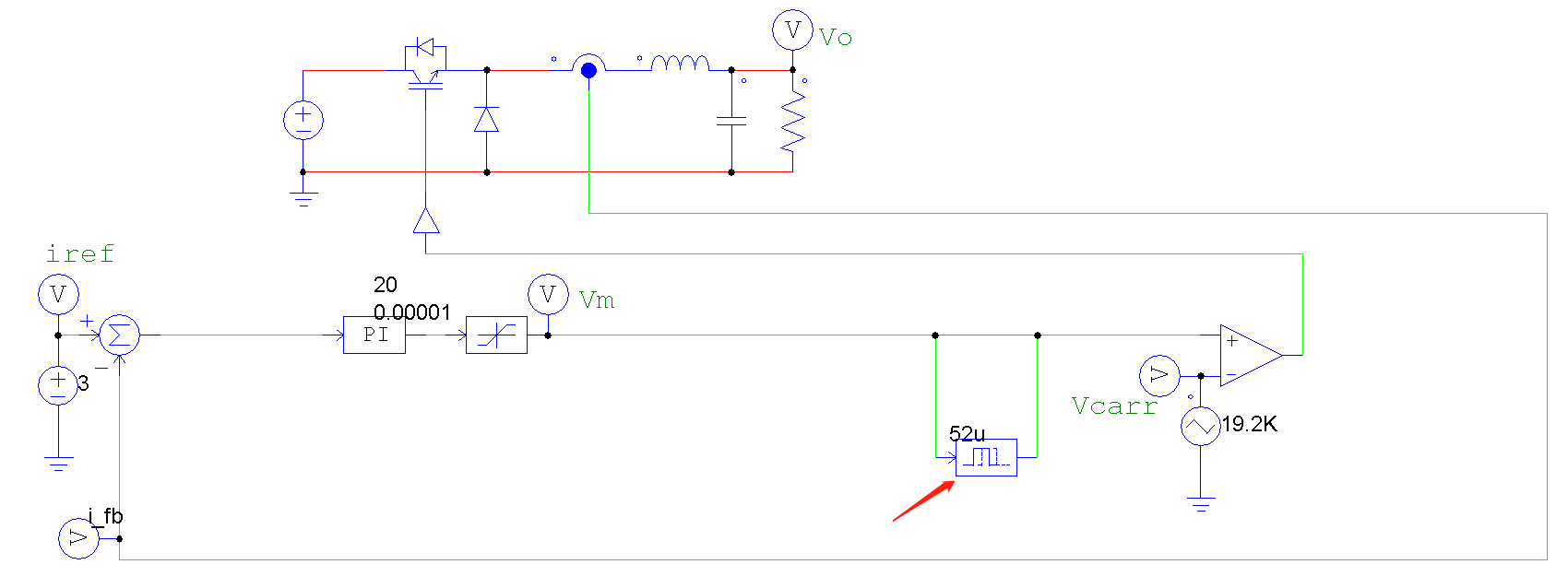
系統出現明顯的震蕩情況,說明數字系統 一個差拍的控制特性,導致相位裕量減少,系統容易不穩定
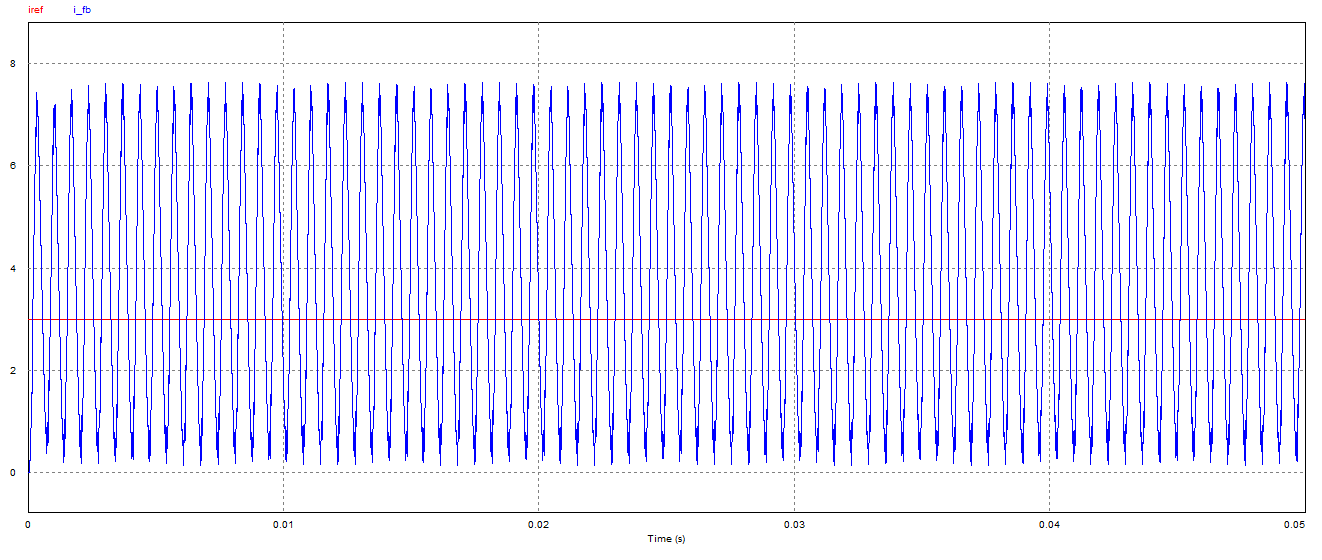
存在一個1.5K 的等幅度震蕩
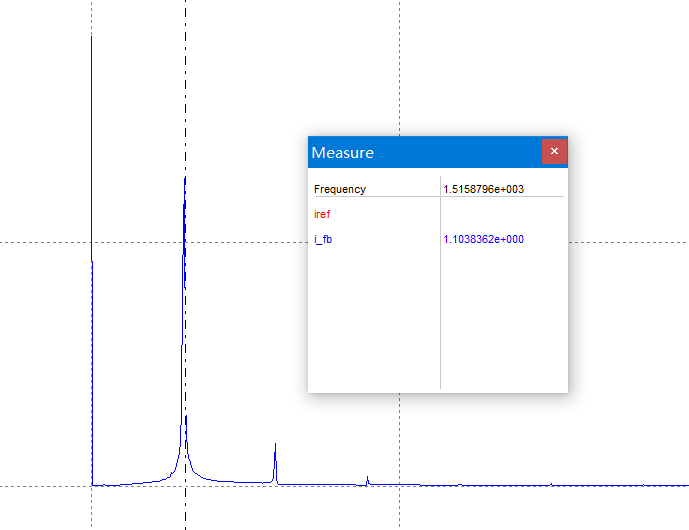
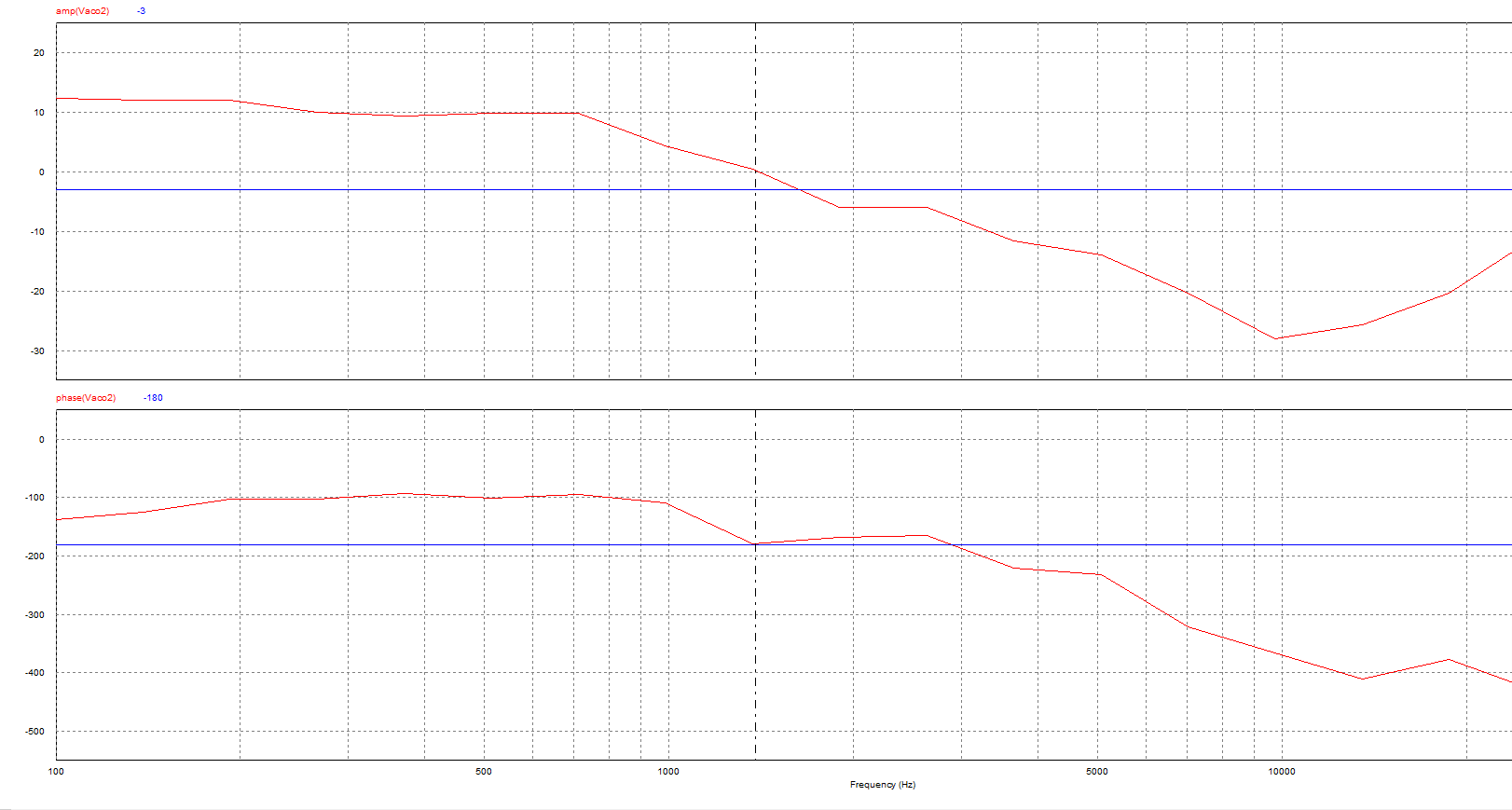
利用交流掃頻功能得到 倍訓波特圖,可見在穿越頻率處(1.5KHZ),相位裕量幾乎為0,所以出現1.5KHZ的等幅度震蕩
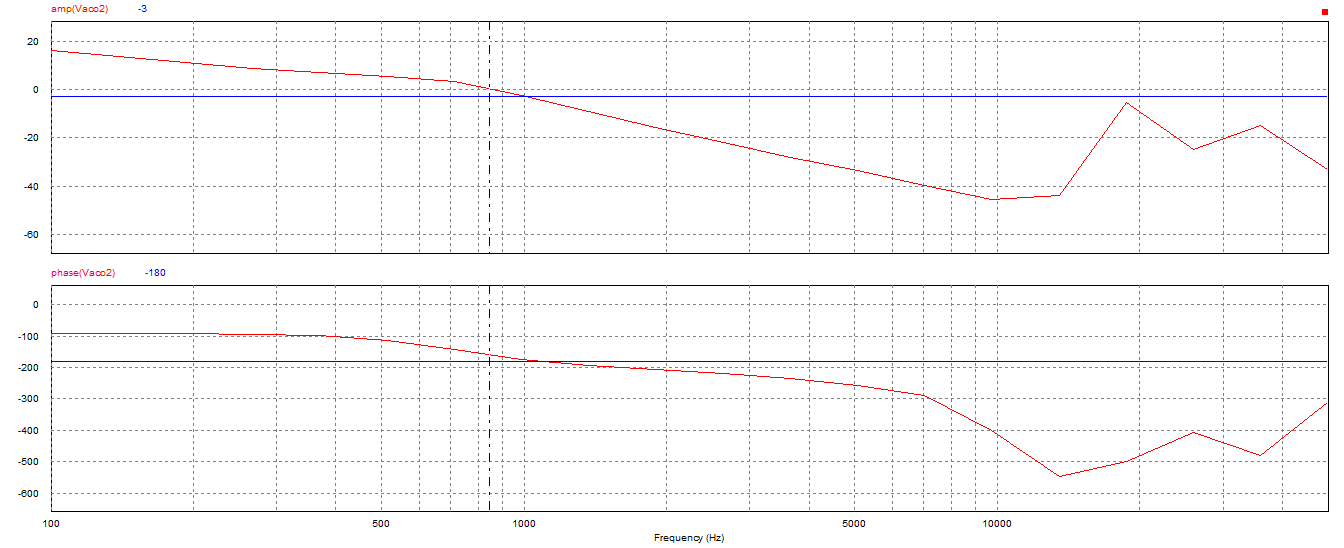
此時若將kp 從20 降低到4, 可見在穿越頻率處 相位大于 -180, 系統勉強能夠穩定
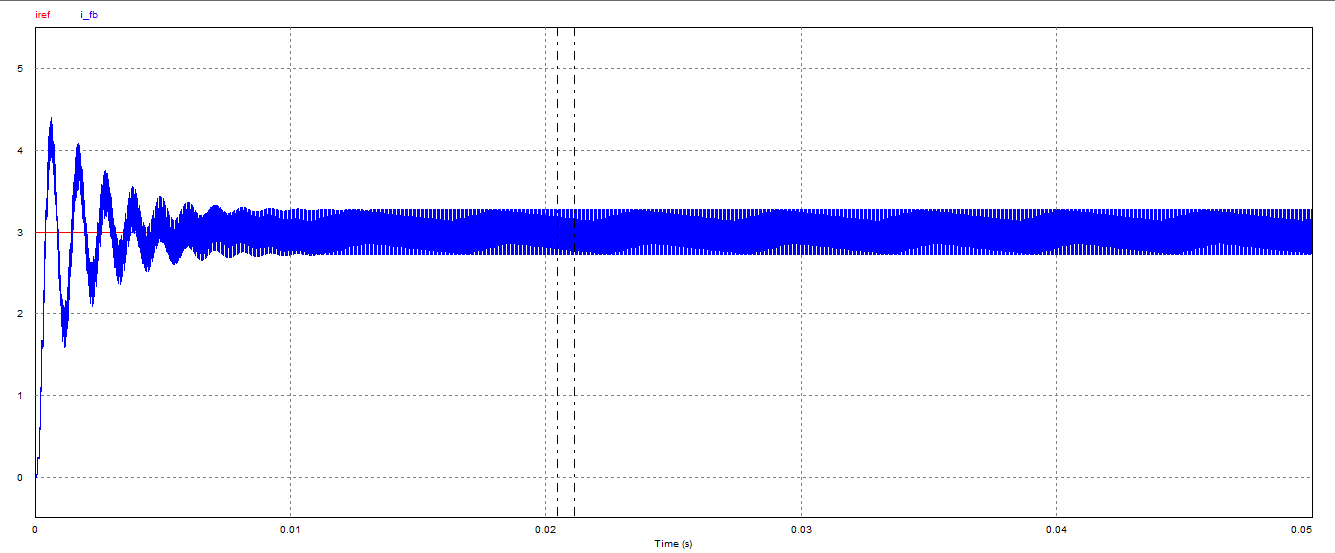
從時間域來看波形出現短時間的衰減震蕩,系統是一種臨界穩定的狀態
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/499462.html
標籤:其他
上一篇:資訊收集