一、簡介
本文主要介紹通過給定的兩個空間向量,計算出從一個向量旋轉到另一個向量的旋轉矩陣,
二、步驟
① 假設兩個向量分別為vectorBefore(x1,y1,z1), vectorAfter(x2,y2,z2),將這兩個向量轉為單位向量,
得到 va = normalize(vectorBefore), vb = normalize(vectorAfter)
② vs = vb × va, 叉乘得到旋轉軸vs
③ v = normalize(vs), vs轉為單位向量得到v
④ ca = vb · va, 點乘得到旋轉角的余弦值 ca, 即cos(angle)
⑤ vt = v * scale, 對v進行縮放,方便后面計算, scale = 1 - ca
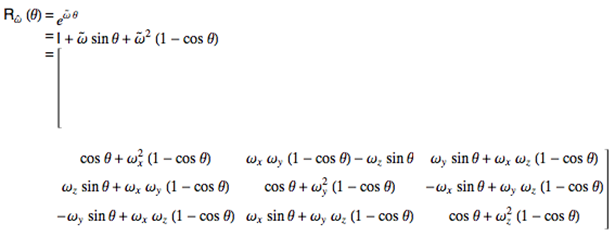
⑥ 旋轉矩陣rm為 [3,3]矩陣, 計算原理為羅德里格旋轉公式(Rodrigues' rotation formula)
rm[0,0] = vt.x * v.x + ca
rm[1,1] = vt.y * v.y + ca
rm[2,2] = vt.z * v.z + ca
vt.x *= v.y
vt.z *= v.x
vt.y *= v.z
rm[0,1] = vt.x - vs.z
rm[0,2] = vt.z - vs.y
rm[1,0] = vt.x - vs.z
rm[1,2] = vt.y - vs.x
rm[2,0] = vt.z - vs.y
rm[2,1] = vt.y - vs.x
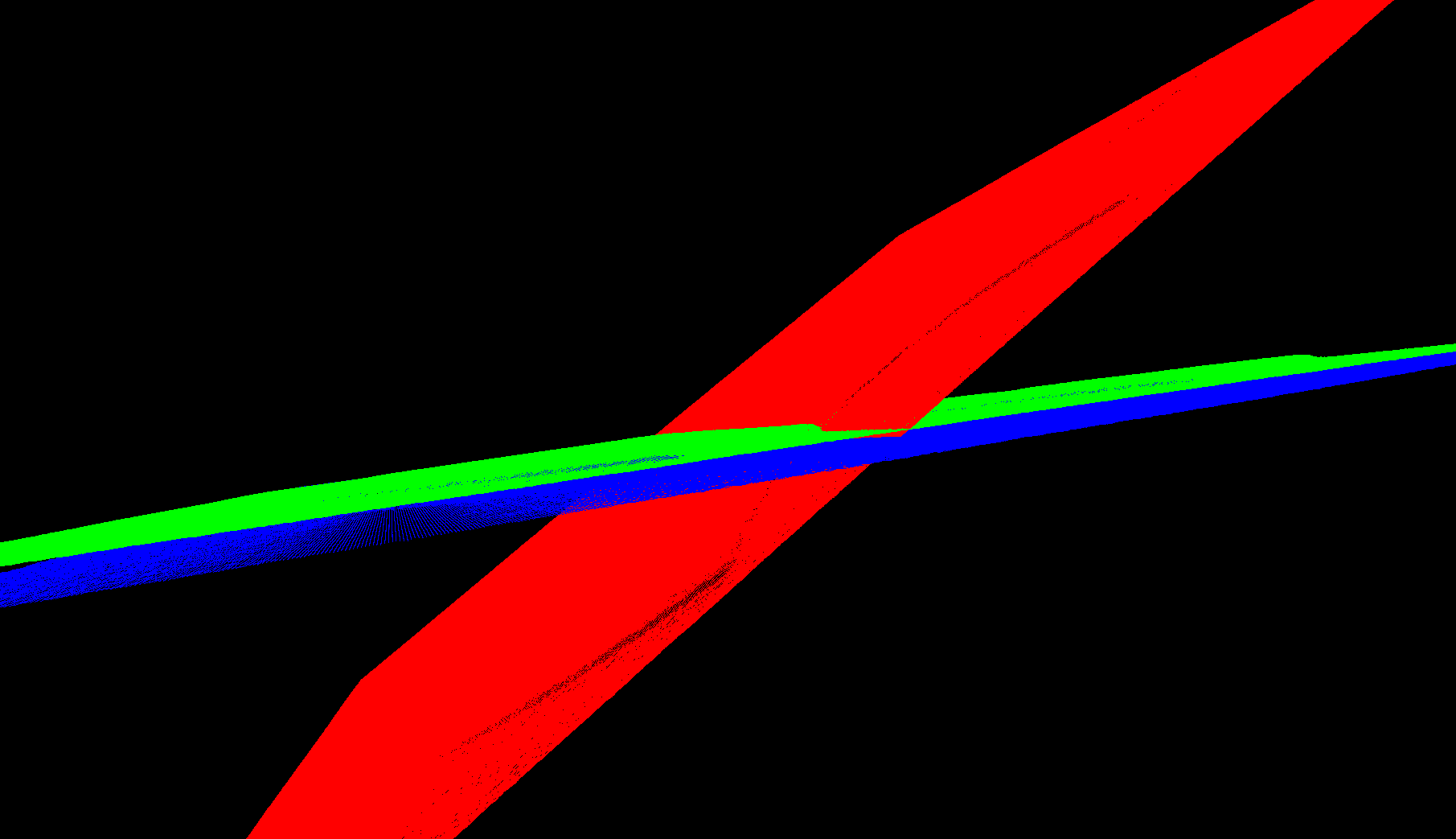
三、效果
紅色為旋轉前的平面,藍色為旋轉后的實際平面, 綠色是對紅色平面應用計算的旋轉矩陣后得到的平面,所以綠色與藍色應在同一平面內,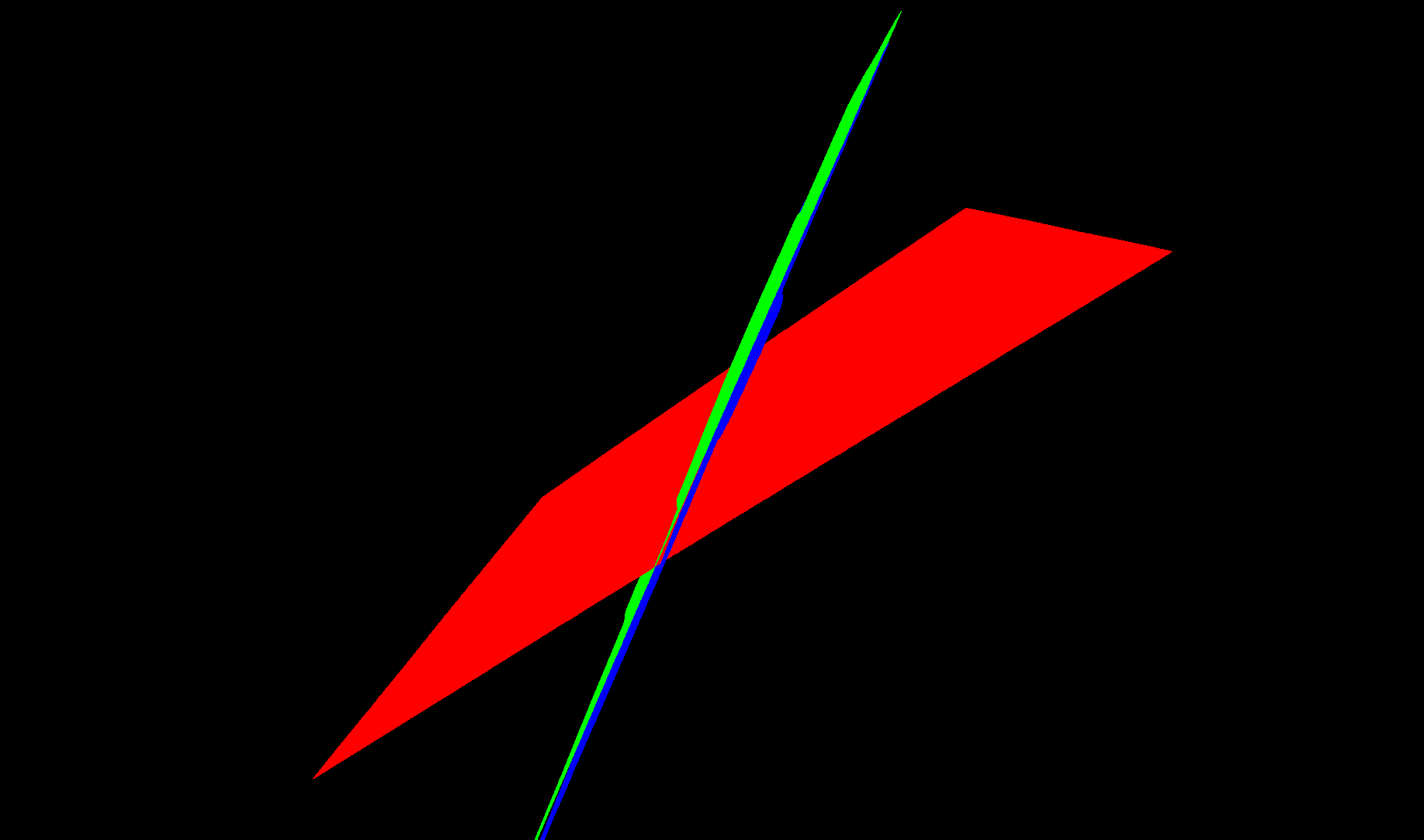
四、代碼
public struct Vec3 { public float x; public float y; public float z; public Vec3(float X, float Y, float Z) { x = X; y = Y; z = Z; } } float[,] getRotationMatrix(Vec3 vectorBefore, Vec3 vectorAfter) { Vec3 vb = Normalize(vectorBefore); Vec3 va = Normalize(vectorAfter); Vec3 vs = CrossProduct(vb, va); Vec3 v = Normalize(vs); float ca = DotProduct(vb, va); float scale = 1 - ca; Vec3 vt = new Vec3(v.x * scale, v.y * scale, v.z * scale); float[,] rotationMatrix = new float[3,3]; rotationMatrix[0, 0] = vt.x * v.x + ca; rotationMatrix[1, 1] = vt.y * v.y + ca; rotationMatrix[2, 2] = vt.z * v.z + ca; vt.x *= v.y; vt.z *= v.x; vt.y *= v.z; rotationMatrix[0, 1] = vt.x - vs.z; rotationMatrix[0, 2] = vt.z + vs.y; rotationMatrix[1, 0] = vt.x + vs.z; rotationMatrix[1, 2] = vt.y - vs.x; rotationMatrix[2, 0] = vt.z - vs.y; rotationMatrix[2, 1] = vt.y + vs.x; return rotationMatrix; } Vec3 CrossProduct(Vec3 a, Vec3 b) { Vec3 c = new Vec3() { x = a.y * b.z - a.z * b.y, y = a.z * b.x - a.x * b.z, z = a.x * b.y - a.y * b.x }; return c; } float DotProduct(Vec3 a, Vec3 b) { return a.x * b.x + a.y * b.y + a.z * b.z; } Vec3 Normalize(Vec3 v) { float frt = (float)Math.Sqrt(v.x * v.x + v.y * v.y + v.z * v.z); if (frt == 0.0f) { return new Vec3(0, 0, 0); } else { return new Vec3(v.x / frt, v.y / frt, v.z / frt); } }
五、呼叫庫
以上是通過自己計算得出結果,其實eigen庫中有輸入兩個向量得出旋轉矩陣的介面,非常簡單,
Eigen::Matrix3d rotMatrix; Eigen::Vector3d vectorBef(vectorBefore[0], vectorBefore[1], vectorBefore[2]); Eigen::Vector3d vectorAft(vectorAfter[0], vectorAfter[1], vectorAfter[2]); rotMatrix = Eigen::Quaterniond::FromTwoVectors(vectorBef, vectorAft).toRotationMatrix();
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/499859.html
標籤:其他