為了應對實際環境中復雜的場景,多個智能體協作研究成為了必經之路,但當系統規模較大時,集中制方法不足以滿足要求,基于自組織系統控制的多智能體集群研究具備完成復雜任務的能力,
機器人實驗是智能體集群研究必要手段
進行智能體集群研究時,通過不同設計方法建立的機器人系統能否實作預期的行為是衡量該系統性能的依據,主要通過三種方法進行驗證:動力學模型、計算機仿真及機器人實驗,
動力學模型通過隨機程序及動力學方法等理論工具對系統收斂性進行驗證,相較于其他方法的抽象層次更高,但是需要預設很多前提,但是在實際智能體集群程序中存在噪聲等隨機條件,無法實作相對統一的模型,
計算機仿真利用計算機對環境與智能體、智能體個體間的相互作用進行模擬,驗證系統的性能并進行優化,該方法可以完成大規模的機器人系統驗證,提高系統驗證效率,但是真實環境中的通信噪聲、地面摩擦、智能體間的碰撞都可能對個體產生影響,進而影響群體行為,仿真并不能完全復現真實場景,
大部分機器人實驗在實驗室的可控環境下進行,光照強度、地面摩擦系數等條件可由研究人員定量控制,而且實驗中的環境噪聲、智能體間的碰撞及通信干擾等實際存在,因此機器人實驗是驗證機器人系統可行性及魯棒性的必要手段,
動作捕捉系統解決智能體集群實驗系統多個痛點
智能體集群實驗系統實作,需要滿足在室內同時定位多個智能體,且由于室內空間小,要求定位精度高,
由于室內信號弱,利用GPS無法實作室內定位,目前的室內定位方案包括激光SLAM、視覺SLAM、光流及UWB等,上述所有定位方式需要優先被解決的問題在于定位精度低(其中定位精度最高的UWB為厘米級),此外還存在如視覺定位方式占用過多計算資源,UWB功率需要低于一定門限(以避免干擾其他通訊設備)等,對于空間不開闊、智能體密度高的室內實驗環境有較大局限性,
利用動作捕捉系統作為多智能體室內定位方案有效解決上述問題,
NOKOV度量動作捕捉系統作為一種外部設備,利用布置在場地四周的光學動作捕捉鏡頭拍攝固定在各智能體上的反游標志點,通過計算出標志點的三維空間坐標,確定智能體的位置(利用同一智能體上多點還可以獲取姿態資訊),定位精度可以達到亞毫米級,由于動作捕捉系統自身計算出位置資訊,并不占用智能體的計算資源,且動捕系統為外置設備,可以減輕無人機負載,NOKOV度量動作捕捉系統可以同時定位40個以上的智能體,且采樣頻率高達380Hz、延遲約為4ms,滿足無人機等快速回應的需求,
多智能體集群協同控制實驗平臺
下面介紹幾種基于光學動作捕捉的多智能體集群實驗平臺,
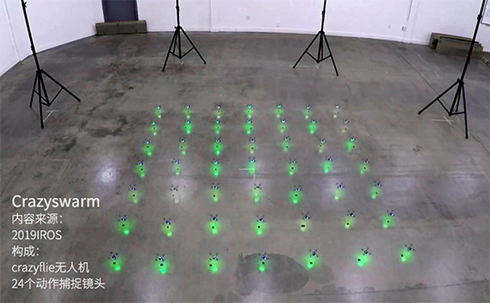
1.Crazyswarm多無人機集群編隊實驗平臺
Crazyswarm多無人機集群編隊實驗平臺是基于ROS開發的可快速實驗多種無人機單機飛行任務和無人機集群控制演算法開發驗證的實驗平臺(使用Crazyflie無人機),平臺針對無人機集群研究人員以下痛點進行開發:室內多臺無人機、單體體積小、定位精度高、軟體開源等,此平臺提供了整套無人集群控制開發、除錯及飛行驗證軟硬體環境,用戶無需具備太多的底層編程技術即可完成演算法的優化和驗證,適用于教學和二次開發,
| 設備名稱 | 型號 |
| NOKOV度量動作捕捉系統 | Mars系列 |
| Crazyflie無人機若干 | Crazyflie2.1 |
| 無線收發模塊 | Crazyradio PA |
| 電腦主機 | Windows系統,虛擬機運行ubuntu系統 |
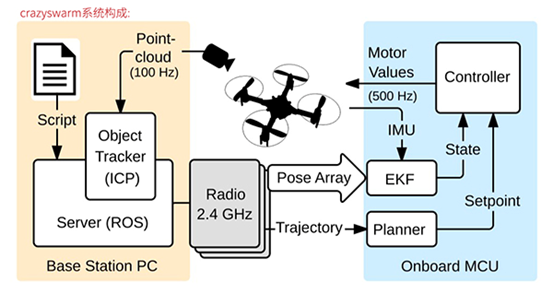
Crazyswarm提出的是目前最大規模的室內無人機集群系統架構,系統利用機載處理器計算,增加通信魯棒性,且需要更少的通信帶寬,
由于動作捕捉系統利用無人機上標志點的不同排布識別各單體,當進行大規模無人機集群時,無人機上沒有足夠空間設計出完全不同的標志點排布方式,為了解決以上問題,Crazyswarm提出利用運動捕捉系統中的原始點云的方法定位無人機,此方法需要滿足兩個條件:
(1)必須知道各無人機的初始位置,才能在ID和物理位置之間建立映射,
(2)跟蹤必須是逐幀完成的,如果標記在長時間內被遮擋,該演算法可能無法重新建立ID-位置映射,

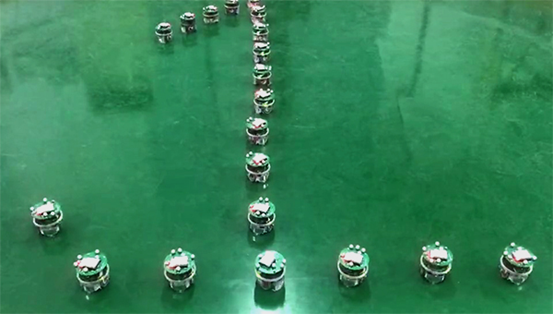
利用Crazyswarm進行實驗的研究方向包括姿態估計、軌跡規劃、編隊控制、機器學習、分布式優化、編隊表演等,電子科技大學基于Crazyswarm平臺,搭載12個NOKOV度量光學動作捕捉鏡頭,進行無人機編隊研究,
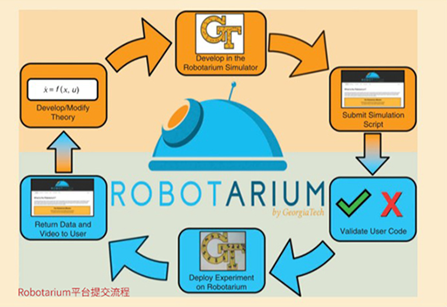
2.Robotarium機器人平臺
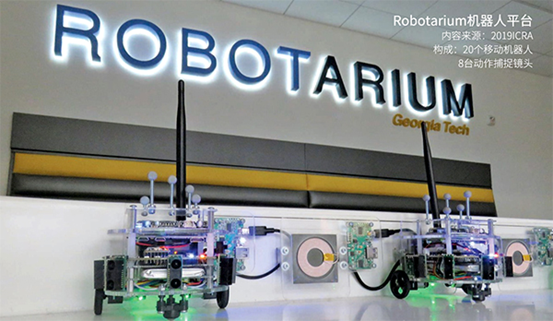
Robotarium提供了一個可以遠程訪問的集群機器人研究平臺,研究人員可以將其演算法上傳并在真實的機器人上驗證,而不是單純的仿真模擬,Robotarium平臺可以同時運行數十至數百個機器人,自從平臺開放以來,已完成了1000多次實驗,
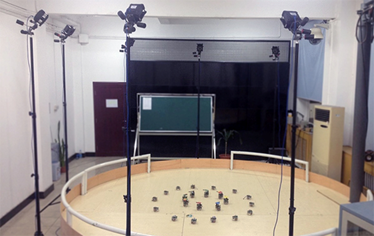
Robotarium平臺中,八個運動捕捉鏡頭安裝在測驗平臺的外圍上方,用來跟蹤每個機器人的運動,并進行資料采集和控制, 每個機器人上固定獨特排布方式的反游標記點,用來區分個體,由于動作捕捉系統捕捉范圍更大,定位精度可以達到亞毫米級而且采樣頻率高,Robotarium平臺選用動捕系統代替了視覺相機跟蹤系統,從硬體安全的角度考慮,動作捕捉系統的速度、準確性(accuracy)和精密度(precision)使Robotarium平臺能夠在執行未知實驗期間檢測出潛在的危險情況,并進行自動糾正,
利用Robotarium平臺實驗的進行研究方向包括編隊控制、路徑規劃、生物啟發的集群控制、避碰等,
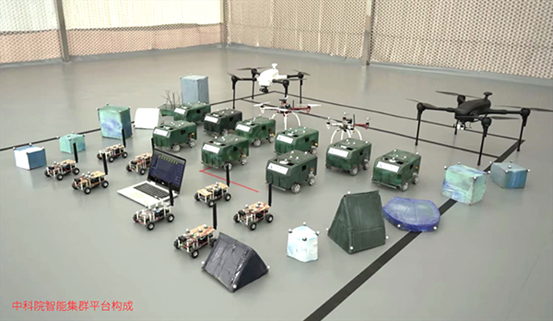
3.中科院自動化所智能集群平臺
智能無人集群系統是中科院自動化所飛行器智能技術團隊及中科院自動化所泰州智能制造研究院團隊聯合研發的針對單體智能和群體智能的一套演示驗證系統,該無人集群系統可實作單體無人車和無人機控制、地空協同、集群對戰以及無人車、無人機編隊表演等功能,同時具有高度開放的 SDK,能夠實時將無人車、無人機的位置、速度等狀態回傳給指揮系統,可用于青少年科普、教育培訓、高校或科研院所的深度二次開發、以及區域物流、軍民融合等行業應用領域,另外,團隊擁有室內高精度NOKOV度量動作捕捉系統,可在密集區域內實時對上百個目標進行捕捉跟蹤,
無人集群系統依靠感知與通信系統獲取外界環境資訊和其他平臺的協助資訊,感知系統中擁有較多的感知模塊,包括 IMU 模塊、遙控接收模塊、無線通信模塊等,這些模塊介面具有普適性,能夠根據不同的任務要求和性能,做出相應的替換和遷移,
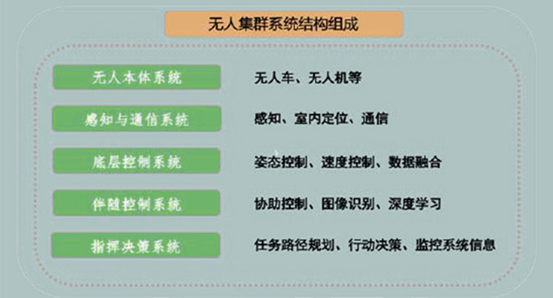
對于精度要求高的情況,平臺部署了NOKOV度量光學三維動作捕捉系統,以提供精確的位姿資訊,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/499863.html
標籤:其他
下一篇:B樹詳解