柔性機械臂是一種新型仿生機械臂,其設計受到自然界中生物結構啟發,比如象鼻、章魚爪、蚯蚓和蛇等,與傳統機械臂相比,柔性機械臂可以在材料變形范圍內進行任意形狀的彎曲運動,通過調整自身形態在狹小復雜的空間內作業,有很強的適應能力,
柔性機械臂經常應用于醫療外科手術、空間救援、設備檢修等領域,這些場景下對柔性機械臂末端作業精度要求很高,但是大多數研究都集中在了提高末端控制的重復定位精度,忽略了末端軌跡跟蹤程序中的控制誤差,而且柔性臂動力學模型難以準確的建立,
四川大學電氣工程學院的研究人員設計了一種剛柔耦合的線驅動柔性機械臂,通過對柔性機械臂運動機理的分析,設計了基于逆動力學模型的柔性機械臂末端定位控制方案,并進行了仿真和實物樣機末端定位控制實驗,
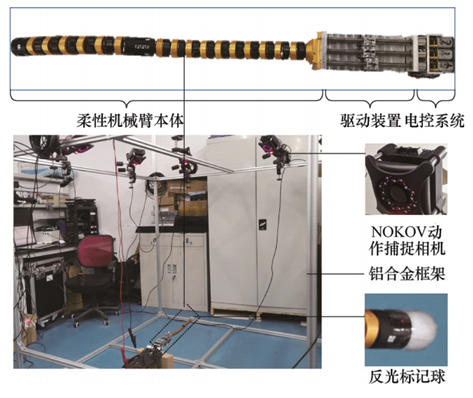
柔性機械臂實物樣機由機械臂本體、驅動裝置和電控系統構成,其中驅動裝置通過電動機帶動滑臺移動并牽引驅動線,完成機械臂本體的運動控制,為了準確記錄柔性機械臂運動程序中末端位置的變化資料,研究人員在機械臂本體上方布置了NOKOV度量光學動作捕捉系統,并在柔性臂末端放置了一個反游標記球,利用動作捕捉相機來跟蹤采集末端位置的實時資料,實驗中NOKOV度量動作捕捉系統的定位精度達到亞毫米級,
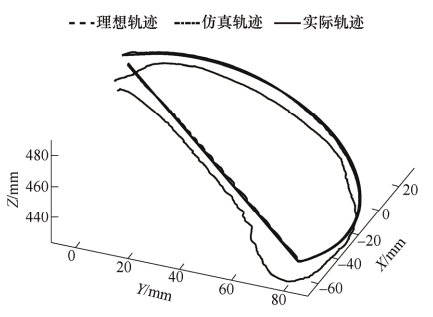
研究人員對比了理想軌跡與仿真軌跡和實際軌跡(NOKOV度量動作捕捉系統采集),并分析了實物樣機產生誤差的原因,實驗結果表明了這種基于逆動力學模型的末端定位控制演算法的有效性,
參考文獻:[1]馬叢俊,趙濤,向國菲,任江濤,陳元科,佃松宜.基于逆運動學的柔性機械臂末端定位控制[J].機械工程學報,2021,57(13):163-171.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/500415.html
標籤:其他
上一篇:從matlab的bwmorph函式的'majority'引數中擴展的一種二值影像邊緣光滑的實時演算法。
下一篇:常用電源符號含義分享