無人車是一種可以進行路徑規劃和環境感知的智能自主車,已成為當前智能車輛的熱門發展方向,無人車能夠通過車載傳感器識別周圍情況和自身狀態資訊,自身具有導航、定位的功能,能夠完成路徑規劃、尋找特定目標等程序,對于智能化無人車的研究,其核心內容是導航控制技術,
在不同天氣、不同時間條件下,僅靠單一導航無法滿足高精度定位與導航的需求,不同環境下無人車上會安裝多種傳感器,傳感器的特性各不相同,目前常用的傳感器有慣性測量元件(IMU)、超寬帶(UWB)、輪式里程計等,
為了讓無人車系統具有更高的自適應性和可靠性,哈爾濱工業大學的研究人員研究了基于多源傳感器資訊融合的導航系統,針對傳感器資訊異步融合問題和存在傳感器失效的情況,使用因子圖模型建立融合框架,將各個傳感器資訊抽象成因子,采用一種基于貝葉斯樹形結構的增量平滑優化演算法(ISAM2)對傳感器資訊進行處理和融合,該方法能夠保證精度接近最小二乘方法的同時,也具有高效的計算效率,能夠較大提高整個系統魯棒性和可靠性,
研究主要針對室內環境,無人車已相對低速運行,融合慣性測量元件、超寬帶、里程計三種傳感器資料,為了驗證演算法的性能,研究人員搭建了多傳感器資訊融合平臺,平臺采用scout2.0移動機器四輪車,車載傳感器包括MTi-G-700(IMU)、LinkTrack S(UWB) 和里程計(ODOM) ,實驗平臺基于Ubuntu系統,并利用ROS進行資料同步采集,

UWB基站布置位置

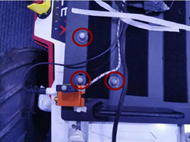
IMU、UWB安裝位置
為了獲取小車的位置真實值,實驗中使用NOKOV度量動作捕捉系統,通過布置在場地上方的16個Mars系列動作捕捉鏡頭(場地約為5m×5m),對粘貼在小車上的三個反游標識點進行識別,從而確定無人車的真實位置,由于動作捕捉系統定位精度達到亞毫米級,是作為小車運動軌跡真值的最佳選擇,

NOKOV度量動作捕捉系統
剛體安裝位置
為了分析定位效果,實驗主要將IMU+UWB+ODOM 融合資料和動捕系統采集的真實值做對比,同時分析對于單體傳感器的定位效果與真實值的對比,
可以看出單傳感器存在一定局限性,融合演算法能夠提升單傳感器的定位效果,說明了本文演算法的可行性,同時研究人員還分析了方法的效率和魯棒性,證明了該方法極大的提高了計算效率,并具有一定魯棒性,在部分傳感器失效時也能獲取較為準確的定位資訊,
參考文獻:沈賀兵. 無人車多源傳感器資訊融合導航技術研究[D].哈爾濱工業大學,2021.DOI:10.27061/d.cnki.ghgdu.2021.004020.
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/505494.html
標籤:其他
下一篇:無線喚醒在灌溉系統上的應用