——記北京理工大學自動化學院多智能體協同控制平臺專案
近年來,無人機編隊逐步走進大眾視野,經常在一些重大會議或活動上給大家帶來一場場視覺盛宴,多架無人機編隊技術在科研中被稱為“多智能體協同控制”,這種技術并不只應用于表演性質的無人機編隊,更是可以應用于工業操作、巡邏偵察、災情救援、環境勘探、智能物流、智能農業,和消費娛樂等方面,
北京理工大學自動化學院的院長夏元清作為學科帶頭人,帶領復雜系統智能控制與決策國家重點實驗室—“空地協同控制組”,在長達6年的不斷探索和改進中,摸索出一套網路化多智能體空地協同控制實驗平臺,
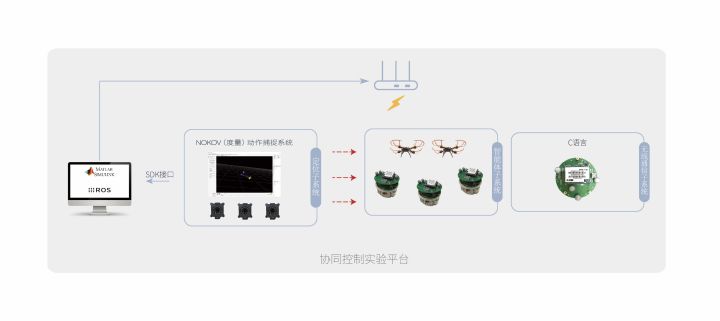
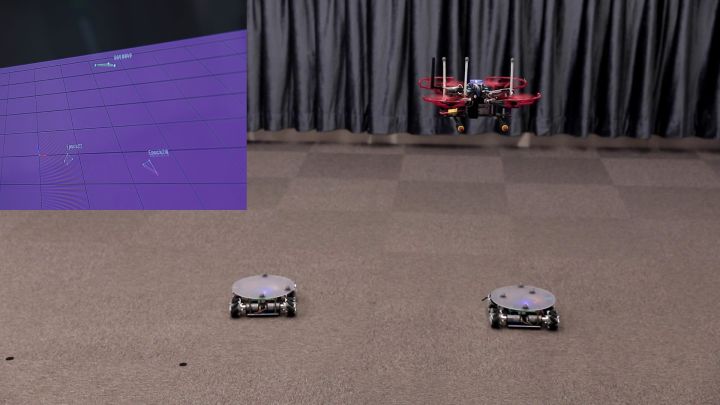
多智能體協同控制平臺可以為高校實驗室提供同構和異構智能體的控制演算法驗證,為理論成果提供實驗支撐,這個平臺主要由定位系統、通訊系統以及控制決策系統組成,為了解決定位系統精度和實時性的問題,平臺采用了NOKOV度量光學三維動作捕捉系統,NOKOV度量光學三維動作捕捉系統的精度可以達到亞毫米,延遲也在兩三個毫秒內,能夠很好地滿足實時定位并將位姿資訊通過無線WiFi 通信傳輸給各個智能體,從而實作各個智能體的定位,明確了智能體的位置之后,每個智能體身上的智能控制決策系統可以對多智能體的行動作出控制,從而實作整套系統的協同控制,
更多相關案例及動作捕捉資訊,請關注服務號【NOKOV度量動作捕捉】
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/506020.html
標籤:其他
上一篇:三星承認泄露部分客戶的詳細資訊