什么是PID?
- PID是Proportional(比例)、Integral(積分)、Differential(微分)的縮寫,
- PID控制演算法是結合比例、積分和微分三種環節于一體的控制演算法,它是連續系統中技術最為成熟、應用最為廣泛的一種控制演算法,
- PID Control,即PID控制器是以PID為原理制造的,在實際生產生活中,為了提高自動化能力,而最常見的控制器,
比如四軸飛行器,再比如平衡小車......還有汽車的定速巡航、3D列印機上的溫度控制器....用“開關量”來控制一個物理量,就顯得比較簡單粗暴了,有時候,是無法保持穩定的,因為單片機、傳感器不是無限快的,采集、控制需要時間,
這時,就需要一種『演算法』:
它可以將需要控制的物理量帶到目標附近
它可以“預見”這個量的變化趨勢
它也可以消除因為散熱、阻力等因素造成的靜態誤差
它就是PID演算法
開環控制系統與倍訓控制系統
在了解什么PID的各部分作用之前需要先了解什么是開環控制系統與倍訓控制系統,
開環控制系統
定義:
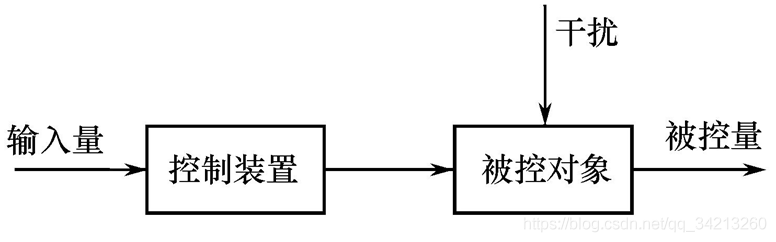
- 開環控制系統是指無被控量反饋的控制系統,即需要控制的是被控物件的某一量(被控量),而測量的只是給定信號,被控量對于控制作用沒有任何影響的系統,
- 可以不用直接測量擾動就組織起一個控制,只要監視由擾動對被控系統造成的偏差就行了,
- 簡單來講就是輸出只受系統輸入控制的沒有反饋回路的系統,因此,開環控制系統又稱為無反饋控制系統,
結構如圖所示:
應用:開環控制系統主要是用于增強型的系統,
例如:指令輸入計算機控制系統、驅動步進電機運動、電風扇(不能根據環境溫度自動調節)、燈的開關、洗衣機、步進電機控制裝置以及水位調節系統等,
倍訓控制系統
定義:倍訓控制系統是指有被控制量反饋的控制,其原理框如圖所示,從系統中信號流向看,系統的輸出信號沿反饋通道又回到系統的輸入端,構成閉合通道,故稱倍訓控制系統,或反饋控制系統,
結構如圖所示:
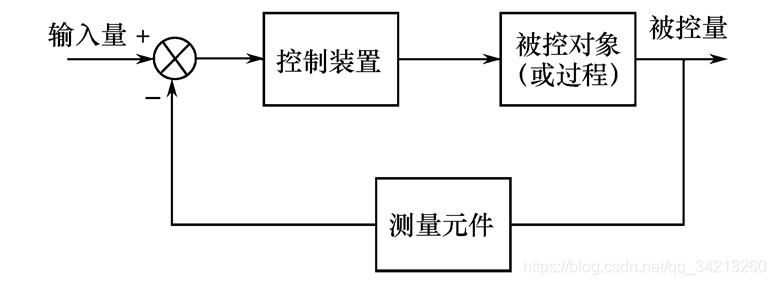
把控制系統輸出量的一部分或全部,通過一定方法和裝置反送回系統的輸入端,然后將反饋資訊與原輸入資訊進行比較,再將比較的結果施加于系統進行控制,避免系統偏離預定目標,倍訓控制系統利用的是負反饋,
在反饋控制系統中,不管出于什么原因(外部擾動或系統內部變化),只要被控制量偏離規定值,就會產生相應的控制作用去消除偏差,
應用:
自動調溫空調(當環境溫度高于設定溫度時,空調制冷系統自動開啟,調定室溫到設定值)、電飯鍋自動保溫、電冰箱溫度控制系統、抽水馬桶等,
PID控制原理
PID,它是倍訓控制演算法中最簡單的一種,它通過三種簡單的控制演算法(即比例,積分,微分)的組合可有效地糾正被控制物件的偏差,從而使其達到一個穩定的狀態,
P 比例調節
當距離目標越大時,調節作用越激進,當比較接近目標時,P的控制作用就比較小,越接近目標,P的作用越溫柔,
特點:
簡單、快速,
比例系數:
增大可以加快回應速度,減小系統穩態誤差,提高控制精度,但是 過大會產生較大超調,甚至導致不穩定;若 取得過小,能使系統減少超調量,穩定裕度增大,但會降低系統的調節精度,使過渡程序時間延長,
比例?回應:
比例?模?塊?僅僅?取決?于?設定?值?和?程序?變數?之間?的?差?值,?這個?差?值?被?稱為“誤差”,比例?增益 (Kc)決定?了?輸出?回應?對?誤差?信號?的?比例,?例如,?如?錯誤?項?的?幅?值?為?10,?則?比例?增益?為?5?將?產生?比例?回應?為?50,?一般?情況?下,?增加?比例?增益?將?提高?控制?系統?回應?的?速度,?但是,?如果?比例?增益?太大,?程序?變數?會?出現?振蕩,?如果?繼續?增加Kc,?系統?振蕩?會?越來越?大,?使得?系統?變得?不?穩定,?以至于?超出?控制,
調節原理:
通常在控制的初始階段,取較大的 ,以加快系統的回應速度,減小上升時間;在控制程序中期,適當減小 ,以減小系統超調;而到過渡程序的后期,為了保證系統的快速回應性能和穩態精度,應適當增大 ,
I 積分調節
前輩科學家們想到的方法是真的巧妙,設定一個積分量,只要偏差存在,就不斷地對偏差進行積分(累加),并反應在調節力度上,
作用:
主要用于消除靜差提高系統的無差度,適用于有自平衡性的系統,
積分系數:
加大積分系數 有利于減小系統靜差,但過強的積分作用會使超調量加劇,甚至引起振蕩;減小積分系數 雖然有利于系統穩定,避免振蕩,減小超調量,但又對系統消除靜態誤差不利,
?積分?回應:
積分?模?塊?將?一段?時間?內的?誤差?相加,?即使是?一個?很小?的?誤差,?也?會?讓?積分?回應?緩慢?增加,?積分?回應?會?根據?時間?持續?增加,?除非?誤差?為?0,?因此,?積分?回應?的?目的?在于?將?穩定?狀態?的?誤差?保持?在?0,?穩定?狀態?誤差?是?程序?變數?和?設定?值?之間?的?差?值,?當?積分?操作?滿足?了?控制器?的?條件,?而?控制器?還?未?將?誤差?保持?在?0?時,?會?產生?一種?稱為?積分?飽和?的?現象,
調節原理:
通常在調節程序初期階段,為防止由于某些因素引起的飽和非線性等影響而造成積分飽和現象,從而引起回應程序的較大超調量,積分作用應弱些,而取較小的 ;在回應程序中期,為避免對動態穩定造成影響,積分作用應適中;在程序后期,應取較大的 值以減小系統靜差,提高調節精度,
D 微分調節
我們需要一個控制作用,讓被控制的物理量的“變化速度”趨于0,即類似于“阻尼”的作用,
作用:
主要是針對被控物件的慣性改善動態特性,它能給出回應程序提前制動的減速信號,它有助于減小超調,克服振蕩,使系統趨于穩定;同時加快系統的回應速度,減小調節時間,從而改善了系統的動態特性,
微分?回應:
如果?程序?變數?快速?增加,?微分?分量?會?導致?輸出?減少,?微分?回應?與?程序?變數?的?變化?率?之間?成?比例?關系,?增加微分?時間?(Td)會?使?控制?系統?對?誤差?的?反應?更加?劇烈,?也?會?增加?整個?控制?系統?的?回應?時間,?大?多數?實用?控制?系統?使用?非常?小?的?微分?時間?(Td),?因為?微分?回應?對?程序?變數?的?噪聲?特別?敏感,?如?傳感器?反饋?信號?中有?噪聲?或?控制?回圈?速率?太低,?微分?回應?會?使?控制?系統?變得?不?穩定
調節原理:
若增加微分作用 ,有利于加快系統回應,使超調量減小,增加穩定性,但也會帶來擾動敏感,抑制干擾能力減弱,若 過大則會使回應程序過分提前制動從而延長調節時間;反之,若 過小,調節程序的減速就會滯后,超調量增加,系統回應變慢,穩定性變差,
因此,對于時變且不確定系統, 不應取定值,應適應被控物件時間常數而隨即改變,對于這類系統,在回應程序初期,適當加大微分作用可以減小甚至避免超調,在回應程序中期,由于對 的變化很敏感,因此 應小些,且保持不變;在調節程序后期, 要再小些,從而減弱程序的制動作用,增加對擾動的抑制能力,使調節程序的初期因 較大而導致的調節時間增長得到補償,
PID控制器的引數整定
PID控制器的引數整定是控制系統設計的核心內容,它是根據被控程序的特性確定PID控制器的比例系數、積分時間和微分時間的大小,PID控制器引數整定的方法很多,概括起來有兩大類:
- 理論計算整定法
它主要是依據系統的數學模型,經過理論計算確定控制器引數,這種方法所得到的計算資料未必可以直接用,還必須通過工程實際進行調整和修改, - 工程整定方法
它主要依賴工程經驗,直接在控制系統的試驗中進行,且方法簡單、易于掌握,在工程實際中被廣泛采用,PID控制器引數的工程整定方法,主要有臨界比例法、反應曲線法和衰減法,三種方法各有其特點,其共同點都是通過試驗,然后按照工程經驗公式對控制器引數進行整定,但無論采用哪一種方法所得到的控制器引數,都需要在實際運行中進行最后調整與完善,現在一般采用的是臨界比例法,
PID除錯一般原則
- 在輸出不振蕩時,增大比例增益P,
- 在輸出不振蕩時,減小積分時間常數Ti,
- 在輸出不振蕩時,增大微分時間常數Td,
總結
?PID?控制?演算法?是?可靠?且?簡便?的?控制?演算法,?在?業?內?廣泛?使用,?該?演算法?靈活?度?高,?在?各種?應用?中?表現?優異,?這?也是?多年?來?繼續?使用?該?演算法?的?主要原因?之一,?
參考資料:
[PID演算法](https://baike.baidu.com/item/PID演算法/4660106 )
[PID理論詳解](https://www.ni.com/zh-cn/innovations/white-papers/06/pid-theory-explained.html )
[一文搞懂PID控制演算法](https://zhuanlan.zhihu.com/p/347372624 )
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/513032.html
標籤:其他